Органы управления в системе "человек – машина", их выбор, классификация, пространственное размещение
Органы управления, являясь элементами интерфейса, обеспечивающими взаимодействие человека с различными техническими устройствами (в системах "человек – машина"), предназначены для вывода оператором необходимой информации о состоянии машины (объекта воздействия) на панели информационных систем, а также для передачи управляющей информации различной модальности (моторной, речевой и др.) машине. При проектировании органов управления учитывается ряд факторов и положений, обеспечивающих эффективность операторской деятельности: эргономическое удобство конструкции органов управления; быстрый поиск и безошибочное нахождение необходимого органа управления; выполнение требуемых в данных условиях операций во времени с определенной эффективностью.
В операторской деятельности выделяют следующие процессы: ввод командной (цифровой, логической и др.) информации; установка требуемых режимов работы аппаратуры; регулировка различных параметров; вызов информации для контроля и т.п. В большинстве случаев оператор посредством механического (с приложением мускульного усилия) воздействия на органы управления осуществляет взаимодействие с техническими системами. С появлением совмещенных сенсорных "индикационно-управляющих" панелей необходимость в применении мускульных усилий на органы управления сводится к минимуму и заменяется прикосновением к сенсорной панели. В военной, космической и других областях техники существуют системы, управляемые движениями глаз и различными биоэлектрическими сигналами. В настоящее время разработаны голографические средства отображения информации и управления техническими системами, что практически исключает тактильный капал из системы управления движениями – моторные действия носят пространственно-переместительный (кинематический) характер. Разработаны и эксплуатируются различные технические системы промышленного и бытового назначения, управляемые голосовыми командами и жестами.
В операторской деятельности выделяют следующие виды сенсомоторных действий: движения включения, выключения или переключения; повторяющиеся движения вращательные, нажимные, ударные; движения, требующие точных дозировок по параметрам силы, перемещения в пространстве и времени. Различают три группы операций по назначению исполнительных действий: используемые постоянно (для программного управления, установки режимов работы, длительного регулирования параметров системы, ввода управляющей и командной информации); вспомогательные органы управления (периодически используемые для контроля работоспособности аппаратуры, включения и выключения и других операций); эпизодически используемые (для выполнения регламентных работ по настройке, калибровке и регулировке основной аппаратуры, блоков и систем и других эпизодических операций).
По конструктивному исполнению органы управления делятся на следующие подгруппы: кнопки; клавиатуры различного назначения (цифровые, буквенно-цифровые и с другими символами), функциональная клавиатура (клавиши управления машинами, оборудованием, различными функциями, командами и др.); однокоординатные и многокоординатные электромеханические устройства управления курсором на экране монитора, технологическими процессами, различными транспортными средствами (компьютерные "мыши", джойстики и др.); тумблеры, переключатели, маховики и штурвалы, рычаги и др. К ножным органам управления относятся педали и кнопки. Отдельные параметры (форма, величина прикладываемого усилия, размер, цвет, графические обозначения) конструктивного исполнения органов управления в рамках подгрупп могут меняться в широких пределах в зависимости от вида, характера и условий трудовой деятельности (т.е. предметного окружения субъекта в производственной среде, положения тела и его частей, шума, освещения, температуры, вибрации, ускорения, невесомости, специальной одежды, характера выполняемых трудовых операций и др.).
При проектировании органов управления следует учитывать ряд положений и требований, разработанных в инженерной психологии, физиологии труда, биомеханике и в других смежных областях наук. Прежде всего, это согласование психомоторных возможностей человека с требованиями, необходимыми для управления технической системой по параметрам скорости, силы, точности и времени исполнения трудовой операции. Согласование по перечисленным параметрам возможностей человека-оператора с необходимыми процессами управления техническими системами осуществляется по следующим направлениям: 1) разработка конструктивных решений при проектировании технических систем и органов управления ими; 2) оптимизация предметного окружения и условий производственной среды; 3) профессиональный отбор и подготовка субъекта труда – оператора.
В процессе проектирования и разработки средств взаимодействия человека с машиной особое внимание уделяется учету анатомических, антропометрических, физиологических и биомеханических особенностей построения движений, возможностям психомоторной системы человека и трудовым операциям, необходимым для реализации производственного процесса. При проектировании рабочей среды оператора (пультов и органов управления) следует учитывать особенности строения исполнительной системы человека и руководствоваться эргономическими рекомендациями, разработанными в области анатомии, антропометрии, физиологии и биомеханики. Так, необходимо учитывать многозвенное строение тела человека при выполнении оператором управляющих моторных действий; рекомендуется минимизировать число звеньев тела, участвующих в реализации рабочей операции. Всегда надо помнить, что от конструкции органов управления (рычагов, рукояток, педалей, клавиатуры и др.) и их расположения в рабочем пространстве во многом зависят скорость, точность, сила и другие параметры выполняемых оператором операций.
Например, если оператор, манипулируя рычагом, решает задачи или точности, или высокой средней скорости перемещения рукоятки рычага из одной точки пространства в другую, или преодоления значительного усилия, то для каждого случая опытным путем подбирается длина рычага (как правило, длина рычага увеличивается). Если оператор решает задачу минимизации времени исполнения операции, то выбирается минимальное плечо рычага (например, переключатели, тумблеры, клавиши и др.). Приведенные рекомендации основаны на особенностях (закономерностях) реализации движений человека.
Влияние амплитуды на скорость отражено на рис. 21.3 [17]. Поступательно-возвратное движение правой рукой совершается между двумя точками при трех амплитудах (А – 38 см; Б – 26 см; В – 13 см). Можно отметить, что в ответ на повышение дистанции происходит повышение скорости, выражаемой наклоном кривой, и особенно повышение максимальной скорости (Barnes, 1953).
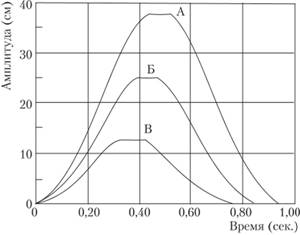
Рис. 21.3. Влияние амплитуды на скорость движения:
А – 38 см; Б – 26 см; В – 13 см
Звенья моторного механизма (кисть, предплечье, плечо, стопа, голень и др.), имеющие определенную массу, с начала движения разгоняются до определенной скорости мышцами-агонистами (фаза "разгона"). Далее они движутся с заданной скоростью по инерции (фаза "баллистическая"); затем указанные звенья тормозятся (фаза "торможения") мышцами-антагонистами в заданной точке. При выполнении коротких по протяженности движений фазы "разгона" и "торможения" могут практически слиться (рис. 21.3, кривая В); при более длинных движениях в зависимости от протяженности "баллистической" фазы значительно растет средняя скорость движения (рис. 21.3, кривая А). Таким образом, общее время выполнения коротких движений, состоящих из фаз "разгона" и "торможения", будет минимально необходимым, а при длинных по протяженности движениях общее время исполнения будет увеличиваться за счет прироста времени действия "баллистической" фазы, увеличивая, таким образом, среднюю скорость выполнения моторного действия. На рис. 21.3 видно, что время исполнения поступательно-возвратного моторного действия большой амплитуды (А) увеличивается примерно на 20–25% относительно движения малой амплитуды (В).
При веденные рекомендации справедливы при условиях работы оператора за столом или пультом управления на расстоянии от линии плеч оператора до 40–50 см. В этой зоне досягаемости рекомендуется выполнять точностные и скоростные действия ведущей рукой в плоскости рабочего стола (сагиттальной плоскости) под углом 30–40°от фронтальной плоскости вправо, а для левой руки – влево. Если рабочие операции выполняются двумя руками, то предпочтительнее эти операции осуществлять в медиальной плоскости (передне-заднем направлении). Исходные материалы приводятся в работе Р. Барнеса [20].
Размещение органов управления в рабочем пространстве определяется характером и особенностями производственного процесса, условиями рабочего пространства и возможностями психомоторной сферы человека. Для оптимального сопряжения возможностей человека с производственным процессом необходимо соблюдение следующих условий и рекомендаций по организации рабочего пространства:
1) определение предельных и оптимальных требований к точности, скорости, силе, моменту вращения органов управления в пределах моторного пространства;
2) приведение в соответствие требований производственного процесса по организации, отбору и размещению органов управления с возможностями психомоторной сферы человека;
3) по возможности необходимо выбрать такие параметры рабочего места, которые будут доступны мужчинам и женщинам;
4) важно располагать органы управления в рабочем пространстве в зависимости от последовательности операций управления;
5) необходимо предусмотреть программную, механическую или другую защиту против случайных действий, могущих привести к аварии.
В процессе проектирования рабочего пространства оператора, связанного с учетом расположения органов управления в рабочем пространстве в зависимости от последовательности операций управления, следует оптимизировать виды, способы и расположение средств отображения информации, что позволит в определенной степени минимизировать время поиска необходимого органа управления. При проектировании пультов сложных технологических процессов управления рекомендуется группировка органов управления и средств отображения информации по основаниям последовательности и функциональности. При последовательном способе группирования органы управления размещаются согласно очередности выполняемых производственных операций (в случае такого группирования рекомендуется размещение органов управления слева направо и сверху вниз). При функциональном группировании органы управления объединяются по сходными функциям и с учетом пространственной совместимости управляемых технических систем с органами управления (например, правый переключатель – для правой технической системы, а левый – для левой). Далее желательно по возможности обеспечить оптимальный доступ органов управления с учетом необходимости действовать правой или левой рукой (например, правый переключатель – для правой руки, а левый – для левой).
Следуя критерию "операциональной частоты" размещения органов управления, рекомендуется помещать в центральной зоне оперативного (моторного) пространства часто используемые органы управления, а редко используемые – на периферии. Аварийные, защитные, контрольные и другие органы управления (выключатели, тумблеры, рычаги и др.), угрожающие производственному процессу, должны быть расположены в центральной зоне [4]. На практике в большинстве случаев эти органы управления размещаются в верхней части центральной зоны в направлении (или около) соответствующих индикаторов.
Эффективность работы сенсомоторной системы оператора зависит от группирования рационально спланированного пространственного расположения систем индикации, отдельных органов управления (или их групп) и линий границ при их соответствующей цветовой кодировке. При одновременном управлении двумя или более органами управления их расположение должно быть спланировано с учетом необходимости действовать правой или левой рукой. В отдельных случаях техническая система может быть оснащена двумя автономными органами управления для руки и ноги, например для аварийной остановки при нештатных ситуациях. При нескольких связанных между собой дисплеях и органах управления оптимальным считается расположение органа управления под соответствующим монитором (или рядом с ним).
Существует большое количество видов операторской деятельности, в которых возникают нестандартные критические ситуации, когда, несмотря на высокий профессиональный уровень и большой опыт, оператор может допустить ошибку. В целях минимизации числа ошибок оператора в результате случайных включений любых соседних органов управления определены максимальные и минимальные расстояния между органами управления. В табл. 21.4 приведены значения минимальной и максимальной дистанций между двумя соседними органами управления для наиболее важных типов органов управления.
Таблица 21.4
Значение дистанций между двумя соседними органами управления
|
Орган управления |
Расстояние между соседними органами управления |
|||||
|
Используемая конечность |
Расстояние, мм |
|||||
|
минимальное |
максимальное |
|||||
|
Нажимная кнопка |
Палец |
20 |
50 |
|||
|
Коленчатый переключатель |
Палец |
25 |
50 |
|||
|
Рычаг |
Рука |
50 |
100 |
|
||
|
Обе руки |
75 |
125 |
|
|||
|
Штурвал |
Обе руки |
75 |
125 |
|
||
|
Рукоятка и поворотный селекторный переключатель |
Рука |
25 |
50 |
|
||
|
Педаль |
Нога |
50 |
100 |
|
||
Рациональное распределение функций управления между правыми и левыми конечностями (рук и ног) человека определяется функциональным назначением выполняемых операций, антропометрическими, физиолого-биомеханическими и сенсомоторными возможностями человека, рабочими (производственными) условиями. Ножное управление по сравнению с ручным имеет ограниченную область применения. Действия педалью и кнопкой могут совершаться с применением значительных усилий в дискретном режиме (включения – выключения) или с дозировкой по усилию или длине смещения органа управления.
Во многих видах профессиональной деятельности (на транспорте, в специальных промышленных машинах и агрегатах, в спорте, музыке и др.) при ножном управлении достигается высокая эффективность управления и высочайшая точность дозировки усилия в широком диапазоне преодолеваемых сопротивлений (от десятков граммов до нескольких десятков килограммов), длин перемещения педали, временных интервалов и др. При конструировании ножных кнопок предусматривают рифленую поверхность для тактильного контроля момента нажатия с дублированием световым или звуковым сигналом. Для ножных кнопок рекомендуется размер 50–80 мм, а глубина утапливания – 30–50 мм.
Большинство ножных кнопок имеют два режима работы: в первом режиме работы при нажатии на кнопку система открывает или перекрывает поток (электроэнергии, жидкости, газов и т.д.), а при снятии давления на кнопку происходит обратный процесс. Во втором режиме при первом нажатии канал открывается и фиксируется, а при втором нажатии канал закрывается. Эффективное, безошибочное и безопасное управление сложными техническими системами требует также учета следующих эргономических рекомендаций при ручном управлении: ближний край рабочей поверхности стола должен быть на уровне локтя сидящего оператора.
При горизонтальной поверхности стола угол в локтевом суставе составляет примерно 80–90°. Угол в локтевом суставе может меняться и в более широких пределах в зависимости от наклона рабочей поверхности стола и расстояния (расположения) до органов управления. С целью минимизации времени реагирования на сигнал кнопку располагают над плоскостью стола так, чтобы угол между кистью и столом составлял примерно 30–45°; при одиночном использовании кнопки ее рабочий ход рекомендуется в пределах б мм, а при частом использовании – 2–6 мм; при нажатии большим пальцем – 3–12 мм.
При огромном многообразии форм, размеров, токовых нагрузок рычажных переключателей (тумблеров) существуют общие требования к конструкции рычага переключения тумблера. Он должен иметь конусообразную или цилиндрическую форму с расширением к концу рычага и соответствовать возможностям исполнительной системы человека.
Для плавного динамического и ступенчатого регулирования, выполняемых одной или двумя руками, используют маховики и штурвалы. Маховик представляет собой колесо-обод со спицами или без них и рукоятку диаметром не менее 50 мм. Штурвал и рулевое колесо являются разновидностью маховика и применяются для управления направлением движения объекта. Штурвал – сектор или часть обода маховика.
Рычаги применяются для плавного регулирования и ступенчатых переключений одной или двумя руками при управляющих усилиях средних и значительных величин