Обоснование и системный анализ результатов графоаналитического моделирования
Продемонстрируем адекватность разработанной выше модели появления техногенных происшествий и возможность ее практического использования на примере следующих трех задач:
а) обоснование принципиальной возможности определения параметров аналитических выражений (11.11) – (11.13);
б) проверка адекватности как их, так и граф-модели;
в) оценка достоверности основанных на этом рекомендаций.
При их решении будем исходить из принятых выше предположений и информации, которая может оказаться доступной в ходе создания технологического оборудования ОТУ и разработки процессов его эксплуатации.
Решение первой задачи начнем с указания способа априорной оценки условной вероятности P45(t) возникновения критических ситуаций, вызванных появлением в соответствующей человекомашинной системе своевременно неустраненных опасных событий. При этом напомним, что состояние 5 граф-модели предполагает совмещение незащищенных элементов этой системы с зоной действия проявившегося источника техногенного риска. Следовательно, для прогноза значений Р45(0 необходимы данные о параметрах, характеризующих конкретные источники опасности реализуемой технологической операции.
Однако в большинстве случаев верхняя оценка величины этой условной вероятности равна
 (11.14)
(11.14)
где  – время нахождения незащищенных объектов в зоне
– время нахождения незащищенных объектов в зоне
возможного появления опасных факторов (в состоянии 4 графа) и длительность k-йтехнологической операции, проводимой в дискретный момент  времени функционирования рассматриваемой
времени функционирования рассматриваемой
системы, которая имеет назначенный ресурс эксплуатации Тэ.
Что касается условной вероятности  перерастания критической ситуации в происшествие, то для ее прогноза необходимо исходить из непоглощения соответствующего опасного события состоянием 5 потокового графа. Подобное условие может быть представлено произведением (а иногда и суммой) таких случайных событий, как отказ технических средств защиты, предусмотренных для парирования опасных ситуаций в ОТУ, и (или) ошибка его персонала при ликвидации либо локализации их нежелательных последствий.
перерастания критической ситуации в происшествие, то для ее прогноза необходимо исходить из непоглощения соответствующего опасного события состоянием 5 потокового графа. Подобное условие может быть представлено произведением (а иногда и суммой) таких случайных событий, как отказ технических средств защиты, предусмотренных для парирования опасных ситуаций в ОТУ, и (или) ошибка его персонала при ликвидации либо локализации их нежелательных последствий.
Считая в первом приближении эти условия необходимыми и достаточными для появления происшествия в человекомашинной системе, можно составить соответствующую структурную схему безопасности ее функционирования в такой ситуации. Подобная схема приведена на рис. 11.2, где параметр r означает число технических средств защиты, задействованных при выполнении конкретной технологической операции (верхний блок схемы), a v – количество занятого в ней персонала (нижний блок).
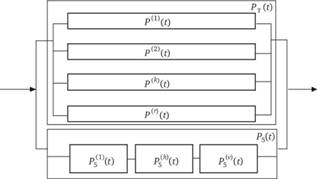
Рис. 11.2. Структурная схема безопасности
В этих условиях перерастание критической ситуации в техногенное происшествие (переход события через состояние 5 графа) эквивалентно пропуску сигнала хотя бы одним из блоков данной структурной схемы безопасности. Следовательно, справедливо соотношение
 (11.15)
(11.15)
где  – вероятность безотказной работы технических средств защиты в дискретный момент времени t проведения технологической операции, найденная при условии, что к его началу они были исправны;
– вероятность безотказной работы технических средств защиты в дискретный момент времени t проведения технологической операции, найденная при условии, что к его началу они были исправны;  – вероятность безошибочного выполнения персоналом алгоритмов, предусмотренных на случай появления критической ситуации (состояние 5).
– вероятность безошибочного выполнения персоналом алгоритмов, предусмотренных на случай появления критической ситуации (состояние 5).
Значение входящей в формулу (11.15) вероятности  может быть определено стандартными методами оценки надежности в технике – с помощью вероятностей
может быть определено стандартными методами оценки надежности в технике – с помощью вероятностей  безотказной работы отдельных (к-х) технологических средств и используемых при этом приборов безопасности, а также их общего количества r и способа соединения. Например, для показанного на рис. 11.2 их параллельного соединения величина этой вероятности соответствует
безотказной работы отдельных (к-х) технологических средств и используемых при этом приборов безопасности, а также их общего количества r и способа соединения. Например, для показанного на рис. 11.2 их параллельного соединения величина этой вероятности соответствует
 (11.16)
(11.16)
тогда как при последовательном соединении технических средств обеспечения безопасности достаточно ограничиться перемножением всех 
В случае более сложных структурных схем безопасности при определении вероятности  также необходимо руководствоваться положениями теории надежности. При этом следует учитывать лишь те отказы технических средств защиты, которые сопровождаются воздействием случайно возникших опасных факторов на незащищенные от них элементы человекомашинной системы и ОТУ в целом. Иначе говоря, значение вероятности
также необходимо руководствоваться положениями теории надежности. При этом следует учитывать лишь те отказы технических средств защиты, которые сопровождаются воздействием случайно возникших опасных факторов на незащищенные от них элементы человекомашинной системы и ОТУ в целом. Иначе говоря, значение вероятности  по отношению к иным отказам их средств защиты здесь принимается равным единице.
по отношению к иным отказам их средств защиты здесь принимается равным единице.
Для предварительной оценки второго сомножителя формулы (11.15) – вероятности  – необходимы данные о численности v персонала и вероятностях
– необходимы данные о численности v персонала и вероятностях  безошибочной и своевременной ликвидации им возникших критических ситуаций. Если параметр v и перечень подобных нестандартных ситуаций должны определяться с учетом эксплуатационно-технологической документации и опыта функционирования аналогичных человекомашинных систем, то вероятности
безошибочной и своевременной ликвидации им возникших критических ситуаций. Если параметр v и перечень подобных нестандартных ситуаций должны определяться с учетом эксплуатационно-технологической документации и опыта функционирования аналогичных человекомашинных систем, то вероятности  в первом приближении могут быть найдены по формуле
в первом приближении могут быть найдены по формуле
 (11.17)
(11.17)
где  – эмпирический коэффициент [9], учитывающий экстремальность или дискомфортность условий труда человека-оператора (см. табл. А.3 в приложении к данному учебнику).
– эмпирический коэффициент [9], учитывающий экстремальность или дискомфортность условий труда человека-оператора (см. табл. А.3 в приложении к данному учебнику).
Входящая в эту формулу вероятность  безошибочных и своевременных действий человека, а также имеющиеся в модели (11.11) вероятности
безошибочных и своевременных действий человека, а также имеющиеся в модели (11.11) вероятности  (соответственно – ликвидации отказов, ошибок и непоявления последних) могут быть определены с помощью обобщенного структурного метода теории эргатических систем [4]. Необходимыми для этого исходными даннымислужат:
(соответственно – ликвидации отказов, ошибок и непоявления последних) могут быть определены с помощью обобщенного структурного метода теории эргатических систем [4]. Необходимыми для этого исходными даннымислужат:
а) предусмотренные документацией алгоритмы  действий персонала в стандартных
действий персонала в стандартных  и нестандартных
и нестандартных  ситуациях – состояниях графа на рис. 11.1;
ситуациях – состояниях графа на рис. 11.1;
б) справочные данные о продолжительности и вероятности безошибочного выполнения среднестатистическим человеком-оператором элементарных действий – тактов алгоритма  ;
;
в) перечень и параметры подобных тактов (см. табл. А.2 в приложении).
В частности, оценка вероятности  безошибочного и своевременного устранения человеком отказов и ошибок
безошибочного и своевременного устранения человеком отказов и ошибок  за заданное время основана на аппроксимации ее значения гамма-распределенной случайной величиной с параметрами формы и масштаба
за заданное время основана на аппроксимации ее значения гамма-распределенной случайной величиной с параметрами формы и масштаба
где  – математическое ожидание времени, необходимого человеку для выполнения конкретного алгоритма
– математическое ожидание времени, необходимого человеку для выполнения конкретного алгоритма  – дисперсия оценки этого параметра.
– дисперсия оценки этого параметра.
При известных левых частях выражений (11.18) искомые вероятности успешной ликвидации возникших отказов и ошибок соответственно равны
 (11.19)
(11.19)
 (11 .20)
(11 .20)
где  – предельно допустимое время от появления ошибки (f = 2) или отказа (i = 3) до возникновения опасности;– случайная гамма-распределенная величина.
– предельно допустимое время от появления ошибки (f = 2) или отказа (i = 3) до возникновения опасности;– случайная гамма-распределенная величина. 
При определении входящих в выражения (11.18) параметров длительности  и безошибочности действий персонала ОТУ
и безошибочности действий персонала ОТУ  исходят из того, что каждый их алгоритм
исходят из того, что каждый их алгоритм  может быть декомпозирован на совокупность упомянутых выше тактов и образуемых ими типовых функциональных структур. При этом последние затем сводятся к нескольким простейших конструкциям с заранее выведенными расчетными формулами [4], позволяющими оценивать искомые здесь вероятностные и временные параметры.
может быть декомпозирован на совокупность упомянутых выше тактов и образуемых ими типовых функциональных структур. При этом последние затем сводятся к нескольким простейших конструкциям с заранее выведенными расчетными формулами [4], позволяющими оценивать искомые здесь вероятностные и временные параметры.
Вероятность безотказной работы технологического оборудования за время выполнения k-х технологических операций  может быть оценена стандартными методами теории надежности. Для неизменной интенсивности
может быть оценена стандартными методами теории надежности. Для неизменной интенсивности  отказов на сравнительно небольших интервалах времени
отказов на сравнительно небольших интервалах времени  функционирования техники справедлива Вперед формула:
функционирования техники справедлива Вперед формула:
 (11 .21)
(11 .21)
Наконец, условные вероятности появления ошибок людей из-за отказов используемой ими техники  , отказов вследствие ошибок
, отказов вследствие ошибок  , а также ошибок одного человека из-за ошибок другого
, а также ошибок одного человека из-за ошибок другого  и отказов одних элементов вследствие отказов других
и отказов одних элементов вследствие отказов других  могут быть найдены рассмотренными выше методами, но при условии их некоторой модификации. Например, включением элементов технологического оборудования и членов работающего на нем персонала в структурные схемы безотказности первого и алгоритмы функционирования второго, а затем исследованием полученных диаграмм методом статистических испытаний или имитационным моделированием происшествий (см. параграф 12.3).
могут быть найдены рассмотренными выше методами, но при условии их некоторой модификации. Например, включением элементов технологического оборудования и членов работающего на нем персонала в структурные схемы безотказности первого и алгоритмы функционирования второго, а затем исследованием полученных диаграмм методом статистических испытаний или имитационным моделированием происшествий (см. параграф 12.3).
Учитывая трудоемкость определения подобным способом условных вероятностей  , а также иллюстративный характер рассматриваемого здесь примера, проведем некоторое упрощение формулы (11.11), а затем выдадим рекомендации по облегчению оценки оставшихся в ней параметров. Например, правомерно это сделать для простейших операций, выполняемых на отдельно взятой технологической установке или на нескольких агрегатах ОПО последовательно, т.е. при условии, что выполнение каждой очередной подобной работы начинается лишь после завершения предыдущей.
, а также иллюстративный характер рассматриваемого здесь примера, проведем некоторое упрощение формулы (11.11), а затем выдадим рекомендации по облегчению оценки оставшихся в ней параметров. Например, правомерно это сделать для простейших операций, выполняемых на отдельно взятой технологической установке или на нескольких агрегатах ОПО последовательно, т.е. при условии, что выполнение каждой очередной подобной работы начинается лишь после завершения предыдущей.
Оказывается, что в этом случае предложенную выше графоаналитическую модель можно значительно упростить путем исключения внутри графа потоков с параметрами  , т.е. приданием в формуле (11.11) соответствующим вероятностям нулевых значений. В этом случае имеем:
, т.е. приданием в формуле (11.11) соответствующим вероятностям нулевых значений. В этом случае имеем:
 (11.22)
(11.22)
Заметим также, что показатели безошибочности и своевременности выполнения персоналом простейших алгоритмов  могут быть рассчитаны в данном случае не по формулам (11.18) – (11.20), а простым перемножением соответствующих параметров элементарных действий, входящих в каждый из подобных алгоритмов, и сложением длительности времени, необходимого для осуществления всех подобных тактов.
могут быть рассчитаны в данном случае не по формулам (11.18) – (11.20), а простым перемножением соответствующих параметров элементарных действий, входящих в каждый из подобных алгоритмов, и сложением длительности времени, необходимого для осуществления всех подобных тактов.
При найденном по формуле (11.22) или (11.11) значении  параметр потока техногенных происшествий определяется следующим образом:
параметр потока техногенных происшествий определяется следующим образом:
 (11.23)
(11.23)
тогда как вероятность их возникновения на интервале  будет уже равна
будет уже равна
 (11.24)
(11.24)
где  – средняя на отрезке времени t величина параметра потока происшествий, оцениваемая с помощью (11.23) и (11.22) или по (11.11) при усредненных вероятностях
– средняя на отрезке времени t величина параметра потока происшествий, оцениваемая с помощью (11.23) и (11.22) или по (11.11) при усредненных вероятностях 
Что касается других задач, заявленных в начале данного параграфа, – проверки достоверности разработанных выше моделей и обоснования вытекающих из них рекомендаций, то при их решении изучим вначале реакцию левых частей выражений (11.11) и (11.22) – (11.24) на изменение входящих в них параметров, а затем проанализируем полученные таким образом результаты. При этом оказывается, что замена в (11.11) и (11.22) вероятностей  на их граничные (равные нулю и единице) значения делает равной им и величину
на их граничные (равные нулю и единице) значения делает равной им и величину  . Подобное имеет место с вероятностью
. Подобное имеет место с вероятностью  в формуле (11.24) при нулевых и бесконечно больших значениях времени t и параметра
в формуле (11.24) при нулевых и бесконечно больших значениях времени t и параметра  потока происшествий.
потока происшествий.
Повышение же трудоемкости технологического процесса (рост параметров  и m), увеличение вероятностей
и m), увеличение вероятностей  появления отказов и ошибок, а также снижение числа и эффективности технических средств обеспечения безопасности, проявившиеся в росте вероятностей
появления отказов и ошибок, а также снижение числа и эффективности технических средств обеспечения безопасности, проявившиеся в росте вероятностей  , будут повышать риск аварийности и травматизма, т.е. увеличивать значения левых частей формул (11.11) и (11.22). В то же время абсолютная безотказность техники и безошибочность персонала –
, будут повышать риск аварийности и травматизма, т.е. увеличивать значения левых частей формул (11.11) и (11.22). В то же время абсолютная безотказность техники и безошибочность персонала –  – или устранение им всех предпосылок к возможным происшествиям –
– или устранение им всех предпосылок к возможным происшествиям –  полностью исключают проявление соответствующих источников, обеспечивая равенство
полностью исключают проявление соответствующих источников, обеспечивая равенство 
Возвращаясь к другим рекомендациям, следует отметить, что они вытекают из качественного анализа приведенного на рис. 11.1 графа. Например, с их помощью можно уточнить ОГЛАВЛЕНИЕ таких важных понятий, как "безопасность производственных процессов" и "безопасность оборудования". Так, менее опасным следует считать процесс, имеющий при прочих равных условиях: а) простую структуру (малое число т); б) низкие интенсивность  и длительность τ выполнения отдельных операций; в) совершенные средства обеспечения безопасности – малые
и длительность τ выполнения отдельных операций; в) совершенные средства обеспечения безопасности – малые  . Безопасным же будет считаться производственное оборудование, обладающее простой и одновременно эргономичной конструкцией, что проявляется соответственно в малых значениях вероятностей
. Безопасным же будет считаться производственное оборудование, обладающее простой и одновременно эргономичной конструкцией, что проявляется соответственно в малых значениях вероятностей 
Однако последние условия являются взаимно исключающими: простая (безотказная) по конструкции техника, как правило, неэргономична, так как требует сложных алгоритмов, а потому и не защищена от возможных ошибок персонала в обычных и нестандартных ситуациях. Данный факт подтверждает объективно существующие диалектические противоречия, которые порождают появление происшествий на производстве и транспорте и которые должны учитываться в последующем системном анализе и синтезе безопасности в техносфере.
Наконец, сделанная только что проверка правильности результатов моделирования позволяет использовать их для априорной количественной оценки параметров риска техногенных происшествий. Сформулируем основные положения соответствующей методики в предположении, что эксплуатация большинства современных производственных объектов может быть декомпозирована на отдельные операции, рассматриваемые как функционирование соответствующих человекомашинных систем.