Лекция 11. Моделирование и прогноз параметров риска происшествий с помощью диаграмм типа "граф"
В данной главе рассматривается технология системного исследования техногенных происшествий на основе диаграмм, уже включающих обратные связи между учитываемыми факторами. Ее конструктивность подтверждается методикой и двумя конкретными примерами, демонстрирующими возможность прогноза показателей соответствующего риска. Начальные сведения о данной технологии даны в гл. 5 и 9, а ее применение демонстрируется ниже (гл. 17 и 18) – при априорной оценке уровня безопасности создаваемых ОПО.
Моделирование происшествий с помощью потокового графа.
Для выявления зависимости между выбранными ранее (см. параграф 6.8) показателями безопасности и параметрами человекомашинных систем, здесь также будет моделироваться процесс возникновения техногенных происшествий. Как и ранее, этот процесс станет интерпретироваться образованием причинной цепи предпосылок, необходимых для аварийного высвобождения накопленного там энергозапаса. Целью же предстоящего моделирования будет прогноз вероятности и ущерба происшествий, возможных в ходе перегрузки АХОВ (первая модель) и их транспортировки железнодорожным транспортом (вторая модель).
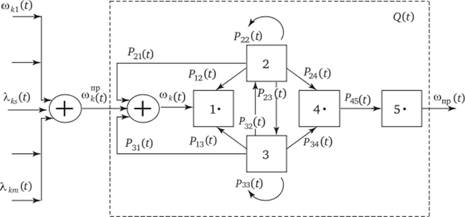
Рис. 11.1. Граф-модель возникновения происшествий на ОПО
Учитывая необходимость снижения трудоемкости разработки и системного анализа первой иллюстративной модели типа "потоковый граф", при ее построении пришлось ограничиться учетом минимально необходимого числа наиболее существенных свойств и параметров соответствующей человекомашинной системы. Поэтому в качестве примера были выбраны погрузочно-разгрузочные работы с АХОВ, выполняемые бригадой из двух человек с помощью автокрана, а в число причин возможных происшествий были включены лишь ошибки людей, отказы используемого ими грузоподъемного механизма и параметры, характеризующие напряженность рассматриваемого технологического процесса.
Процесс образования причинной цепи предпосылок к возникновению техногенных происшествий в ходе перегрузки АХОВ представлен на рис. 11.1 в виде потокового графа. На вход соответствующей динамической системы поступает сигнал в виде проектного потока требований на выполнение конкретных технологических операций, задаваемый параметром  . Его значения будут изменяться во времени t, так как зависят от двух переменных: числа т типов перегрузочных операций подобного вредного вещества и интенсивности
. Его значения будут изменяться во времени t, так как зависят от двух переменных: числа т типов перегрузочных операций подобного вредного вещества и интенсивности  их выполнения.
их выполнения.
Возникновение происшествий в ходе рассматриваемого процесса интерпретируется появлением подобных случайных событий на выходе граф-модели и учитывается параметром wnp(t) их потока. Считается также, что возникновению каждого из них предшествует появление особых ситуаций, обусловленных сочетаниями случайно возникших факторов и требующих нестандартной реакции со стороны персонала или эксплуатируемого им оборудования. При этом предполагается, что подобные ситуации могут быть вызваны появлением только ошибок людей и отказов используемой ими техники.
Среди таких предпосылок особое внимание уделяется так называемым опасным событиям в человекомашинной системе, под которыми подразумеваются отказы технологического оборудования и ошибки использующего его персонала, приводящие к появлению техногенных опасностей в зоне действия незащищенных от них объектов. Предупреждение подобных событий и локализация их нежелательных последствий обычно обеспечиваются специально предусмотренными для этого средствами и организационно-техническими мероприятиями. Однако вследствие их несовершенства незамеченные или своевременно не устраненные опасные события могут привести к появлению опасных и критических ситуаций, а иногда – и техногенных происшествий.
Кроме того, при построении графа использовались выявленные ранее (см. параграф 6.2) закономерности аварийности и травматизма, а также упрощающие допущения, позволившие сократить число состояний данной модели. В частности, непосредственно не учитывались нерасчетные внешние воздействия на людей и технологическое оборудование со стороны рабочей среды и не рассматривались условия выхода человекомашинной системы из опасных и критических ситуаций. Иначе говоря, предполагалось, что в случае успешного (в смысле отсутствия происшествий) завершения конкретной перегрузочной операции функционирование этой системы прекращалось в одном из поглощающих состояний графа – 1,4 или 5.
Принятые допущения позволили учесть в изображенном выше графе лишь пять состояний, через которые может проходить человеко-машинная система при функционировании с целью перегрузки АХОВ: 1 – динамическое равновесие, характеризуемое завершением операции без появления ошибок людей и отказов автокрана; 2 и 3 – особые ситуации, вызванные возникновением возможных ошибок и отказов соответственно; 4 – опасное состояние, обусловленное неустранением этих опасных событий; 5 – критическая ситуация, связанная с одновременным появлением в зоне действия возникшей опасности незащищенных от нее объектов.
При этом процесс выполнения рассматриваемых работ интерпретируется как обработка потока требований на выполнение перегрузки каких-либо АХОВ с поглощением подавляющего большинства таких требований в состояниях 1, 4 или 5. Поглощение означает, что человекомашинная система как бы адаптировалась соответственно к возникшей опасной и критической ситуациям путем их ликвидации, что является основанием для начала обработки очередной заявки на перегрузку. Если же реализация каких-либо требований завершается появлением события на выходе графа, то это считается происшествием и учитывается вероятностью Q(t) его возникновения в данный дискретный момент перегрузки.
При формализации исследуемого здесь опасного технологического процесса также предполагалось следующее: а) исключались прямые переходы из состояния 1 в состояние 5, минуя 4, и в состояние 4, минуя состояния 2 или 3; б) учитывалась возможность не только обратных переходов из состояний 2 и 3 в состояние 1 (для повторения операций после выявления ошибок и отказов), но также переходов внутри и между состояниями 2 и 3. Принятие этих допущений позволило уменьшить число состояний графа до пяти, а переходов внутри него – до девяти.