Многоцелевая (векторная) оптимизация деятельности транснациональной компании
Одной из сложнейших проблем при учете множества целей транснациональной компании является их согласование, поскольку некоторые из них могут быть противоречивыми. Например, увеличение объемов выпуска продукции, а также стремление к экологической чистоте производства ведут к соответствующему возрастанию издержек.
Одним из решений этой проблемы может быть установление приоритетов, что приводит к возникновению иерархии целей, складывающейся из основных, промежуточных и вспомогательных. Эту иерархию принято называть также деревом целей.
Более перспективен поиск в этой ситуации так называемых оптимальных компромиссных управленческих решений, учитывающих "интересы" всех целей фирмы. Для определения таких решений в экономической теории чаще всего используется принцип, предложенный итальянским ученым В. Парето[1], который может быть сформулирован следующим образом: "Следует считать, что любое изменение, которое никому не причиняет убытков и которое хоть кому-то приносит пользу (по собственным оценкам субъектов), является улучшением состояния системы".
Если в той или иной экономической системе при поиске оптимального компромиссного плана осуществлены все возможные улучшения по Парето, то соответствующая система достигает оптимума по Парето.
Идею поиска оптимального компромиссного решения (плана) рассмотрим на примере оптимизации двухмерного критерия:

Каждая локальная цель является функцией переменной (х), определяемой на некотором закрытом интервале [а, b]. Графики изменения составляющих функций  и
и  представлены на рис. 22.1.
представлены на рис. 22.1.
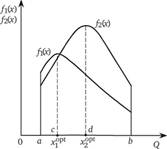
Рис. 22.1. Компромиссная область и оптимальность по Парето
Очевидно, что поиск оптимального компромиссного решения в данном конкретном примере целесообразен лишь на множестве точек интервала [с, d], так как вне этого интервала решение может быть улучшено сразу по обеим целевым функциям.
В соответствии с принципом Парето план хг будем считать лучше (предпочтительнее) плана  и обозначать
и обозначать  , если хотя бы по одной компоненте S целевой вектор функции
, если хотя бы по одной компоненте S целевой вектор функции

а по остальным компонентам

Интервал [с, d] называется множеством Парето, или множеством эффективных планов, и характеризуется тем важным свойством, что на нем ни одно решение не может быть улучшено без ущерба для других критериев.
Таким образом, множество Парето – это множество допустимых решений (планов), которые невозможно улучшить:

Множественность эффективных планов является следствием взаимозаменяемости (взаимокомпенсации) скалярных критериев, позволяющей увеличивать одни компоненты за счет уменьшения других. В этих условиях каждый эффективный план по-своему исчерпывает возможности оптимизируемой системы, реализуя определенный компромисс между локальными целями. Отметим, что принципы выделения множества эффективных планов строго научны, не требуют принятия каких-либо постулатов и, следовательно, лишены элементов произвола и субъективизма. Зато определение на этом множестве оптимального компромиссного плана требует постулирования той или иной схемы компромисса.
Среди многочисленных схем поиска компромиссных решений наиболее обоснована, с нашей точки зрения, одна. Компромисс в этой схеме достигается в процессе поиска решения, максимизирующего минимальную относительную степень достижения цели по всем локальным целям.
Алгоритм решения многоцелевой модели в этом случае будет следующим.
1. Все критерии (частные целевые функции) целевой вектор- функции делают "однонаправленными", например решаемыми на максимум. Достигается это изменением знака на обратный в целевых функциях, соответствующих минимизируемым целевым показателям.
В результате получается модель

при

где  – функция затрат і-го ресурса;
– функция затрат і-го ресурса;  – располагаемый объем і-го ресурса.
– располагаемый объем і-го ресурса.
2. Решают одноцелевые (по каждой локальной функции в отдельности) задачи. Результаты решения сводят в табл. 22.1.
Таблица 22.1
|
Локальные целевые функции |
Локальные оптимальные планы |
Локальные целевые функции |
|||
|
|
|
… |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fs – максимум по столбцу |
|
|
|
|
|
|
fs – минимум по столбцу |
|
|
|
|
|
|
|
|
|
|
|
|


































3. При решении одноцелевых моделей "автоматически" отыскивается наибольшая (максимально возможная) для данной целевой функции степень достижения цели. В случае же многоцелевой оптимизации при поиске оптимального компромиссного плана степень достижения абсолютного оптимума не может быть наибольшей по всем целевым функциям одновременно, а следовательно, возникает проблема ее измерения. В абсолютном измерении степень достижения цели по s-му показателю может быть рассчитана по формуле  , т.е. как степень удаления текущего значения функции от наименьшего ее значения (от найденных субоптимальных планов). Графически это показано на рис. 22.2.
, т.е. как степень удаления текущего значения функции от наименьшего ее значения (от найденных субоптимальных планов). Графически это показано на рис. 22.2.
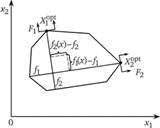
Рис. 22.2. Иллюстрация расчета локальной степени достижения цели
Поскольку компоненты целевой вектор-функции задаются в различных единицах измерения и масштабе, то для сопоставления различных степеней достижения цели при поиске компромиссного оптимального решения их необходимо нормировать. Нормирование степени достижения оптимума по s-му критерию можно осуществить так:
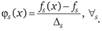
Очевидно при этом, что  .
.
Введя, таким образом, функционал  , корректно формализующий понятие степени достижения s-й цели, приступим к формализации принятой схемы компромисса.
, корректно формализующий понятие степени достижения s-й цели, приступим к формализации принятой схемы компромисса.
Если невозможно получить максимальную степень достижения цели по всем критериям сразу, потребуем, чтобы наибольшей была минимальная по любому из критериев степень достижения оптимума. Это означает, что если достигнут оптимум по какому- либо критерию, то по всем остальным степень достижения цели будет не меньшей (равной или большей).
Многоцелевая модель, формализующая все вышесказанное, должна быть записана следующим образом:

Или, введя новую переменную  , получим:
, получим:

Проведя упрощающие преобразования, получим

Необходимо отметить, что полученная многоцелевая модель при линейности исходной также является линейной моделью с незначительным увеличением ее размерности: на одну переменную λ и s дополнительных (по числу локальных целей) ограничений.