Степень подвижности кинематической цепи
Число степеней свободы кинематической цепи относительно одного из звеньев называют степенью ее подвижности. Для определения степени подвижности кинематической цепи W необходимо из общего числа степеней свободы всех ее подвижных звеньев вычесть число связей, накладываемых на относительное движение звеньев кинематическими парами, которые связывают звенья. Пусть п – число подвижных звеньев пространственной кинематической цепи; – число кинематических пар i-го класса
– число кинематических пар i-го класса  Тогда 6n – общее число степеней свободы п звеньев цепи, если считать их нс связанными между собой, а
Тогда 6n – общее число степеней свободы п звеньев цепи, если считать их нс связанными между собой, а  – общее число связей, наложенных на звенья механизма кинематическими парами i-го класса.
– общее число связей, наложенных на звенья механизма кинематическими парами i-го класса.
С помощью введенных обозначений степень подвижности кинематической цепи можно определить выражением
 (1.1)
(1.1)
Развернув сумму в выражении (1.1), получим структурную формулу пространственной кинематической цепи общего вида (формулу Сомова – Малышева):
 (1.2)
(1.2)
Формула (1.2) показывает, какому количеству звеньев кинематической цени должно быть задано движение (т.е. сколько должно быть ведущих звеньев), чтобы движение остальных звеньев было однозначно определенным. Формулой можно пользоваться, если убрать дополнительные общие условия связи, которые накладывают ограничения на движение всех звеньев кинематической цепи. Например, для плоской кинематической цепи, у которой звенья движутся параллельно одной неподвижной плоскости, перпендикулярной осям вращательных пар, на них наложены три общие связи (см. рис. 1.1). Звенья такой цепи не могут перемещаться вдоль оси, перпендикулярной к неподвижной плоскости, и вращаться относительно двух осей, лежащих в этой плоскости. Число степеней свободы каждого звена уменьшается здесь на 3 – число общих связей. Общее число степеней свободы п звеньев цени будет равно (6 – 3)п. Каждая кинематическая пара в этом случае накладывает на движение звеньев цепи на три ограничения меньше класса пары. Так, пары 5-го и 4-го классов накладывают на движение звеньев цепи соответственно две и одну связи, а кинематические нары 1, 2 и 3-го классов в рассматриваемой цепи пе могут иметь места.
Для плоской кинематической цепи структурную формулу (1.2) перепишем в виде
 (1.3)
(1.3)
(формула Чебышева).
Кинематические пары 5-го класса is плоском механизме могут существовать в виде вращательной и поступательной пар (см. табл. 1.1).
Поскольку механизм представляет собой кинематическую цепь, то степень его подвижности определяется по формулам (1,2), (1.3) с учетом общих связей, наложенных на все звенья механизма. Степень подвижности механизма соответствует тому количеству независимых между собой координат (обобщенных координат), которое необходимо задать для однозначной определенности положений всех звеньев механизма. Так, для механизма шарнирного четырехзвенника имеем (см. рис. 1.1)

Степень подвижности подсчитываем по формуле (1.3):

Следовательно, данный механизм должен иметь одно ведущее звено и одну обобщенную координату. В качестве обобщенной координаты обычно выбирают угловую координату ведущего звена φ(.
Для кривошинно-ползунного механизма (рис. 1.6) параметры формулы (1.3) такие же, как и для механизма шарнирного четырехзвенника. Ведущее звено (ползун 1) движется прямолинейно, и за обобщенную координату принимается линейная координата 5 ползуна.
В механизмах с двумя степенями подвижности за обобщенные координаты выбираются координаты двух ведущих звеньев или одного ведущего звена, если это звено образует со стойкой кинематическую пару с двумя степенями свободы.
Формула (1.2) несправедлива для механизмов с избыточными (пассивными связями). Избыточными связями в механизме называют повторяющиеся связи, которые дублируют ограничения, наложенные другими связями. Избыточные связи можно удалить из механизма, сохранив при этом заданное число степеней свободы механизма. Если число избыточных связей обозначить с/, то степень подвижности механизма с избыточными связями можно выразить соотношением
 (1.4)
(1.4)
В плоском шарнирном четырехзвеннике (см. рис. 1.1) 
 . Число избыточных связей находим по формуле (1.4):
. Число избыточных связей находим по формуле (1.4):

Устранение избыточных связей достигается изменением подвижностей некоторых кинематических пар. Например, если в плоском шарнирном четырехзвеннике (см. рис. 1.1) вращательную пару В заменить на сферическую пару 3-го класса А, а вращательную пару С – на сферическую с пальцем пару 4-го класса В, то полученный таким образом механизм пространственного четырехзвенника (см. рис. 1.4) будет иметь  Тогда
Тогда

Таким образом, в механизме пространственного четырехзвенника избыточные связи отсутствуют.

Рис. 1.6
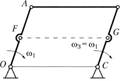
Рис. 1.7
Наличие избыточных связей в механизмах требует повышенной точности изготовления элементов кинематических пар во избежание дополнительных нагрузок на звенья механизма из-за их деформаций. В некоторых случаях избыточные связи вводят намеренно для повышения жесткости механизма. Например, в механизме сдвоенного параллелограмма (рис. 1.7) необходимо строгое соблюдение геометрических соотношений: ОА = ВС, АВ = ОС, если OF = = CG, то FG = ОС. Кроме того, требуется высокая точность изготовления механизма. Введение дополнительного звена FG не вносит новых геометрических связей. И хотя при формальном подсчете степени подвижности по формуле (1.3) получаем W = 0, фактическая степень подвижности механизма остается равной единице. Звено FG, введенное в механизм для увеличения его жесткости, во время работы обеспечивает сохранение контуру ОАВС формы параллелограмма.