С и н т е з ч о т и р и л а н к о в и х м е х а н і з м і в з а д в о м а п о л о ж е н н я м и л а н о к
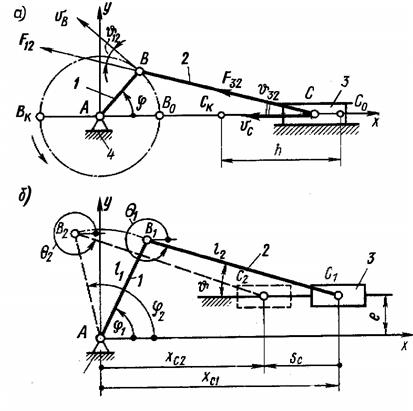
Кривошипно-повзунний механізм.Для центрального кривошипно-повзунного механізму (e = 0, рис.9.2,а) хід повзуна 3 (його максимальне переміщення) дорівнює подвійній довжині кривошипа: h = 2 l1. Крайні положення повзуна відповідають кутовим координатам кривошипа φ = 0 і 1800.
 29
29
Рисунок 9.2
При проектуванні механізмів треба враховувати вельми важливий параметр, який характеризує умови передачі сил і працездатність механізму, - кут тиску υ (кут між вектором сили, прикладеної до веденої ланки , і вектором швидкості точки прикладення рушійної сили; тертя і прискорений рух мас при цьому поки що не враховуються). Кут тиску не повинен перевищувати припустимого значення: υmax ≤ υдоп. Кут υ при передачі сили на ведену ланку показують на схемі механізму в залежності від того, яка його ланка є веденою. Якщо нею буде повзун 3, то сила  передається на нього з кутом υ32, а якщо кривошип 1, то сила
передається на нього з кутом υ32, а якщо кривошип 1, то сила  складе кут υ12 з вектором швидкості
складе кут υ12 з вектором швидкості  .
.
При веденому кривошипі кут тиску υ12 два рази за цикл (коли шатун і кривошип розташовуються по одній прямій) набуває максимального значення, рівного 900. Ці положення кривошип проходить тільки завдяки інерції обертальних мас деталей, жорстко зв’язаних з кривошипом 1.
Найбільший кут тиску υ32max визначають шляхом дослідження функції υ32 = υ32(φ) на максимум. Для центрального механізму (е = 0) максимальне значення кута тиску  буде при φ = 90 або 2700. Таким чином, чим менше значення λ2 = l2 / l1, тим менше розміри механізму (по відношенню до довжини кривошипа), але більше кути тиску. Зі зростанням величини υ32max , незалежно від того, яка ланка є ведучою, збільшується зусилля між повзуном та напрямляючею (між поршнем і стінкою циліндра поршневої машини). Тому, наприклад, для механізмів двигунів внутрішнього згоряння відношення λ2 прийнято вибирати в межах λ2 = 3…5, що відповідає значенню υ32max = 19…110 (див. Баранов Г.Г. Курс теории механизмов и машин. М., 1967).
буде при φ = 90 або 2700. Таким чином, чим менше значення λ2 = l2 / l1, тим менше розміри механізму (по відношенню до довжини кривошипа), але більше кути тиску. Зі зростанням величини υ32max , незалежно від того, яка ланка є ведучою, збільшується зусилля між повзуном та напрямляючею (між поршнем і стінкою циліндра поршневої машини). Тому, наприклад, для механізмів двигунів внутрішнього згоряння відношення λ2 прийнято вибирати в межах λ2 = 3…5, що відповідає значенню υ32max = 19…110 (див. Баранов Г.Г. Курс теории механизмов и машин. М., 1967).
Якщо е ≠ 0 (рис.9,1,в), хід повзуна (його максимальне переміщення) з ∆АС1С′1 й ∆АС2С′2 
 , (9.3)
, (9.3)
звідки при заданих h, e i λ2 = l2 / l1 можна знайти l1 (наприклад, методом інтерполяційного наближення – задаючись рядом значень l1 , близьких до h/2, і перевіряючи рівність лівої та правої частин рівняння). Максимальний кут тиску υ32max при е > 0 буде в положенні, коли φ1 = 2700; якщо е < 0, то при φ1 = 900.
Якщо задані два положення кривошипа (рис.9.2,б), які позначені координатами φ1 та φ2, переміщення повзуна sС ( з урахуванням знаку: на рис.9.2,б sС < 0) і відношення λ2 = l2 / l1 й λе = е / l1 , то довжини ланок l2 і l1 визначають таким чином.
Проектуємо векторне рівняння  на вісь y , маємо для будь-якого положення
на вісь y , маємо для будь-якого положення  , звідки кутова координата ланки 2 в положеннях 1 і 2:
, звідки кутова координата ланки 2 в положеннях 1 і 2:
 .
.
Проектуючи теж векторне рівняння на вісь x, маємо
 , звідки, після підставляння
, звідки, після підставляння  , отримаємо
, отримаємо
 .
.
 Потім за величиною λ2 визначають l2.
Потім за величиною λ2 визначають l2.
Кривошипно - коромисловий механізм(рис.9.3).
Рисунок 9.3
За заданою довжиною стійки l4 , довжині веденої ланки – коромисла l3 з її координатами γ1 і γ2 у крайніх положеннях невідомі довжини ланок l1 і l2 визначають так. З’єднуючи прямими лініями точки С1 і С2 з точкою А, маємо
 ,
,
звідки  (9.4)
(9.4)
Максимальний кут тиску υ32max буде при φ = 90 або 1800.
Механізм з коливальним циліндром(рис.9.4). Цей механізм використовується в гідроприводах. На рис.9.4 він показаний в крайніх положеннях АВ1С і АВ2С. При переході з одного крайнього положення в інше поршень 2 переміщується на відстань h (хід поршня), а ведене коромисло 1 довжиною l1 повертається на необхідний кут β. Щоб повністю використати циліндр при переміщенні поршня, задаються відношенням довжини циліндра l3 ≈ lВ1С до ходу поршня h у вигляді
 коефіцієнта k = l3 / h >1, що визначається конструктивно; наприклад, k = 1.3; 1.4 і т. д.
коефіцієнта k = l3 / h >1, що визначається конструктивно; наприклад, k = 1.3; 1.4 і т. д.
Рисунок 9.4
Треба також враховувати кут тиску υ як кут між віссю циліндра, по напрямку якої передається зусилля , і вектором швидкості точки прикладення сили. Цей кут змінний, тому при проектуванні задаються припустимим кутом тиску υдоп, з тим щоб при роботі механізму не перебільшувати його.
Синтез оптимальної за кутами тиску схеми такого механізму при заданих l1, k, β проводиться так (рис.9.4).
Побудувавши два положення АВ1 і АВ2 веденої ланки 1, приймаємо хід поршня h = lB1B2. Відкладемо на продовженні прямої В2В1 відрізок l3 = lB1C = kh, і отримаємо точку С. В крайніх положеннях механізму, як це видно з ∆АВ1N й ∆ANB2 , кут тиску за величиною буде максимальним υmax = β/2.
У всіх інших положеннях кут тиску буде меншим, оскільки при переході точки В з положення В1 в положення В2 він змінює свій знак й проходить через нульове значення.
З ∆АВ1N  .
.
З ∆АВ1С довжина стійки
 .
.
При невеликих кутах β υmax може бути в даній схемі значно меншим υдоп, і цей варіант кінематичної схеми можна поліпшити з точки зору габаритів механізму шляхом зменшення довжини стійки l4 .Оптимальну за габаритами схему механізму за умовою υmax = υдоп отримаємо так (рис 9.4,б). Хай задані l1, k, β, υдоп. Креслимо перший варіант схеми. Зміщуємо точку С у нове положення С0 , для якого кут тиску в положенні 2 механізму збільшиться й досягне значення υ” = υдоп . При переміщенні точки С кут тиску в положенні 1 також змінюється: він спочатку зменшується, а потім може, пройшовши через нульове значення, змінити знак і знову збільшитись.
Хід поршня тепер буде h = lB2D < lB1B2 ; його можна знайти, розв’язавши квадратне рівняння, що отримане з ∆С0В1В2 за теоремою косинусів:
 , де В1С0 = kh, B1B2 =2l1sin(β/2), C0B2 = kh + h = ( k + 1) h .
, де В1С0 = kh, B1B2 =2l1sin(β/2), C0B2 = kh + h = ( k + 1) h .
Розв’язок дає таку формулу
 ,
,
де 
Після цього визначають l3 = kh і довжину стійки з ∆AС0B2

Цей варіант кінематичної схеми є дуже целесообразним для випадку, коли треба долати велике навантаження на веденій ланці на початку руху, оскільки кут тиску u¢< u²< uдоп, в результаті чого збільшується момент рушійної сили  відносно вісі А і зменшуються втрати на тертя в кінематичних парах.
відносно вісі А і зменшуються втрати на тертя в кінематичних парах.
Кінематичні пари слід підбирати так, щоб механізм був статично визначеним, або ж, якщо це важко, звести до мінімуму число надлишкових в’язей. В даному випадку механізм буде статично визначеним (без надлишкових в’язей), якщо пара А обертальна, пари В і С сферичні, пара поршень—циліндр циліндрична.
Тоді, враховуючи, що число степенів волі механізму W = W0 + WM = 1 + 2 = 3 (дві місцеві рухомості — незалежні обертання поршня зі штоком й циліндра відносно власних осей), за формулою Малишева маємо q = 0.