Проекция силы на ось и на плоскость
Міністерство освіти і науки України
Херсонська державна морська академія
Кафедра технічної механіки, інженерної і комп'ютерної графіки
Реєстр. №______________
Шифр _________________
Конспект лекцій
З дисципліни Теоретична та прикладна механіка
Факультет суднової енергетики
Ступінь освіти бакалавр
Галузь знань 0701 Транспорт і транспортна
Інфраструктура
Напрям підготовки 6.070104 «Морський та річковий транспорт»
Професійне спрямування: Експлуатація суднового електрообладнання та засобів автоматики
Курс І, Ісп, Іспз
Форма навчання денна, заочна
Херсон – 2015
Консект лекцій з дисципліни Теоретична та прикладна механіка розробив у відповідності з навчальним планом підготовки бакалавра галузь знань 0701 Транспорт і транспортна інфраструктура, напрям підготовки 6.070104 «Морський та річковий транспорт», професійне спрямування: «Експлуатація суднового електрообладнання та засобів автоматики» доцент Васильченко Г.Ю. ‑ 50 с. (на російській мові).
Конспект лекцій розглянуто і ухвалено на засіданні кафедри технічної механіки, інженерної і комп'ютерної графіки
01.09.2015р. протокол № 1
Завідувач кафедри
технічної механіки і інженерної
і комп’ютерної графіки _______________ Н.П. Знамеровська
Завідувач навчально-
методичного відділу _______________ В. В. Черненко
ВВЕДЕНИЕ
Дисциплина «Теоретическая и прикладная механика» (Т и ПМ) входит в цикл дисциплин, призванных обеспечить общетехническую подготовку инженеров по эксплуатации судового электрооборудования, владеющих основами проектирования, изготовления, эксплуатации и ремонта различных механизмов, применяемых при использовании судовых энергетических установок, изучение которых преследует следующие цели:
1) использование знаний, полученных студентами при изучении естественнонаучных и инженерных дисциплин;
2) освоение знаний, необходимых для последующего освоения специальных дисциплин, предусмотренных требованиями кодекса ПДМНВ и ИМО, которые предусматривают следующие умения:
а) содействие наблюдению за работой электрических систем и механизмов
б) начальное знание работы механических систем, включая:
- первичные двигатели, в том числе главную двигательную установку
- вспомогательные механизмы в машинном отделении
- системы управления рулем
- системы обработки грузов
- палубные механизмы
- бытовые судовые системысходные
3) формирование у будущих специалистов знаний о строении механизмов и машин;
Дисциплина предусматривает формирование у будущих специалистов общетехнических, конструкторских навыков, а также навыков эксплуатации механических систем, применяемых в морской отрасли и транспорта в целом. В результате изучения дисциплины завершается и реализуется общетехническая подготовка студентов, создается база для усвоения дисциплин специализации.
Для приобретения умений и навыков, необходимых для профессиональной деятельности, изучение дисциплины «Теоретическая и прикладная механика» преследует решение следующих задач:
1) обучение общим принципам проектирования и конструирования, построение моделей и алгоритмов расчетов изделий машиностроения по основным критериям работоспособности;
2) овладение методами теоретического анализа конструкций, механизмов, узлов и деталей машин электромеханического и энергетического оборудования, а также изучение основ конструирования и критериев работоспособности типовых деталей, узлов, механизмов и машин.
3) формирование навыков использования стандартов, технической справочной литературы и современной вычислительной техники, а также общенаучных (ОНК) и профессиональных (ПК) компетенций, которыми должен обладать морской инженер в современных условиях.
РАЗДЕЛ 1.ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Лекция 1. Статика
План лекции:
1.Основные понятия и аксиомы статики.
2.Связи и их реакции.
3. Система сходящихся сил.
4.Проекция силы на ось и на плоскость.
5. Теорема о трех силах.
6. Момент силы относительно центра (точки).
7. Пара сил. Момент пары.
Основные понятия и аксиомы статики
Наука об общих законах движения и равновесия материальных тел и о возникающих при этом взаимодействиях между телами называется теоретической механикой.
Статикой называется раздел механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил.
Абсолютно твердым телом называется такое тело, расстояние между двумя любыми точками которого всегда остается постоянным.
Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется силой.
Скалярные величины – это такие, которые полностью характеризуются их численным значением.
Векторные величины – это такие, которые помимо численного значения, характеризуются еще и направлением в пространстве.
Сила является векторной величиной (рис. 1).
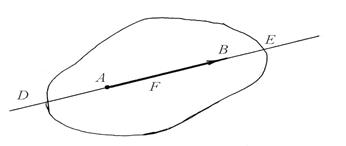
Рис. 1
Сила характеризуется:
– направлением;
– численной величиной или модулем;
– точкой приложения.
Прямая DЕ, вдоль которой направлена сила, называется линией действия силы.
Совокупность сил, действующих на какое-либо твердое тело, называется системой сил.
Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным.
Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю.
Равнодействующая – это сила, которая одна заменяет действие данной системы сил на твердое тело.
Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой.
Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел.
Внутренними называются силы, с которыми частицы данного тела действуют друг на друга.
Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной.
Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными.
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю и направлены вдоль одной прямой в противоположные стороны (рис. 2).
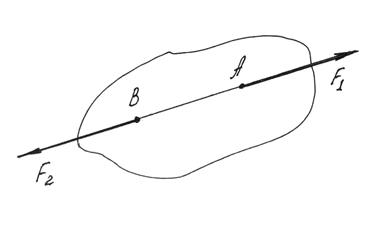
Рис. 2
Аксиома 2. Действие одной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах (рис. 3).

Рис. 3
R = F1 + F2
Вектор R, равный диагонали параллелограмма, построенного на векторах F1 и F2, называется геометрической суммой векторов.
Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие.
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
Тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным.
Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным.
Все то, что ограничивает перемещения данного тела в пространстве, называется связью.
Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции связи или реакцией связи.
Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу.
Аксиома связей. Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
Связи и их реакции
Тело, которое из данного положения может совершать любые перемещения в пространстве, называется свободным.
Тело, перемещению которого препятствуют другие скрепленные или соединенные с ним тела, называется несвободным.
Все то, что ограничивает перемещение данного тела в пространстве, называется связью.
Сила, с которой данная связь действует на тело, препятствуя его перемещениям, называется реакцией связи.
Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу (при решении задач очень важно правильно определить направление реакций связи).
1. Гладкая поверхность или опора. Реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке (рис. 4).

Рис.4.
2. Нить. Реакция Т натянутой нити направлена вдоль нити к точке ее подвеса (рис. 5).

Рис.5
3. Цилиндрический шарнир. Реакция R цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной к оси шарнира (рис. 6).

Рис.6
4. Шаровой шарнир и подпятник. Реакция R шарового шарнира и подпятника может иметь любое направление в пространстве (рис. 7).

Рис.7
Аксиома связей. Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей (рис. 1.8).

Рис.8
Реакции связи – это исходные данные, которые необходимо знать при расчете конструкций на прочность.
Система сходящихся сил
Сходящимися называются силы, линии действия которых пересекаются в одной точке (рис. 9а).

Рис. 9
Система сходящихся сил имеет равнодействующую, равную геометрической сумме (главному вектору) этих сил и приложенную в точке их пересечения.
Геометрическая сумма, или главный вектор нескольких сил, изображается замыкающей стороной силового многоугольника, построенного из этих сил (рис. 9б).
Проекция силы на ось и на плоскость
Проекцией силы на ось называется скалярная величина, равная взятой с соответствующим знаком длине отрезка, заключенного между проекциями начала и конца силы. Проекция имеет знак плюс, если перемещение от ее начала к концу происходит в положительном направлении оси, и знак минус – если в отрицательном (рис. 10).

Рис. 10
Проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси:
FX = Fcos  .
.
Проекцией силы на плоскость называется вектор, заключенный между проекциями начала и конца силы на эту плоскость (рис. 11).

Рис. 11
Fxy = F cosQ
Fx = Fxy cos = F cosQcos
Fy = Fxy cos  = F cosQcos
= F cosQcos
Проекция вектора суммы на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось (рис. 12).

Рис. 12
R = F1 + F2 + F3 + F4
Rx = ∑Fix Ry = ∑Fiy
Для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнут – это геометрическое условие равновесия.
Аналитическое условие равновесия.Для равновесия системы сходящихся сил необходимо и достаточно, чтобы сумма проекций этих сил на каждую из двух координатных осей были равны нулю.
∑Fix = 0 ∑Fiy = 0 R = 
Теорема о трех силах
Если свободное твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке (рис. 13).

Рис. 13
Момент силы относительно центра (точки)
Моментом силы относительно центраназывается величина, равнаявзятому с соответствующим знаком произведению модуля силы на длину h (рис. 14).

Рис. 14
М = ±F · h
Перпендикуляр h, опущенный из центра О на линию действия силы F, называется плечом силы F относительно центра О.
Момент имеет знак плюс, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки, и знак минус – если по ходу часовой стрелки.
Свойства момента силы.
1. Момент силы не изменится при переносе точки приложения силы вдоль ее линии действия.
2. Момент силы относительно центра равен нулю только тогда, когда сила равна нулю или когда линия действия силы проходит через центр (плечо равно нулю).
Пара сил. Момент пары.
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абсолютно твердое тело (рис. 15).
Наикратчайшее расстояние (перпендикуляр) между линиями действия сил называется плечом пары α.
Действие пары сил на тело сводится к вращательному эффекту, который зависит:
1) от модуля F сил пары и длины ее плеча α;
2) положения плоскости действия пары;
3) направления поворота в этой плоскости.
Моментом пары называется величина, равная взятому с соответствующим знаком произведению модуля одной из сил пары на ее плечо:
M = ±Fα. (1.7)
Момент пары будет считаться положительным, если пара стремится повернуть тело против хода часовой стрелки, и отрицательным – если по ходу часовой стрелки.

Рис.15
Алгебраическая сумма моментов пары сил относительно любого центра, лежащего в плоскости ее действия, не зависит от выбора этого центра и равна моменту пары:
m0(F) + m0(F′) = M .
Теорема об эквивалентности пар. Не изменяя оказываемого на тело действия, можно пару сил, приложенную к абсолютно твердому телу, заменить любой другой парой, лежащей в той же плоскости и имеющей тот же момент. Из этой теоремы вытекают следующие свойства пары сил:
1) данную пару, не изменяя оказываемого ею на тело действия, можно перенести куда угодно в плоскости действия пары;
2) у данной пары, не изменяя оказываемого ею на тело действия, можно произвольно менять модуль силы или длину плеча, сохраняя неизменным ее момент.
Теорема. Действие пары сил на твердое тело не изменится, если пару сил перенести из данной плоскости в любую другую плоскость, ей параллельную.
Сложение пар, лежащих в одной плоскости
Теорема о сложении пар. Система пар, лежащих в одной плоскости, эквивалентна одной паре, лежащей в той же плоскости и имеющей момент, равный алгебраической сумме моментов слагаемых пар:
М =Σmi .
Для равновесия плоской системы пар необходимо и достаточно, чтобы алгебраическая сумма этих пар была равна нулю:
Σmi = 0 .
Данное равенство является условием равновесия пар.
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
1. Реакция связи приложена к телу или к связи?
2. Перечислите основные типы связей
3. Сколько компонент реакции имеет каждый тип связей и куда они направлены?
4 Сформулируйте понятие «алгебраический момент силы».
5. Что значит «плечо силы»?
6. Как определяется знак алгебраического момента силы?
7. Что такое «пара сил»?
8 Что значит «плечо пары»?
9. Как определяется алгебраический момент пары и его знак?