СИСТЕМА КЕРУВАННЯ ТА ПРИЛАДИ АВТОМАТИКИ АВТОМАТИЧНИХ ПРАЛЬНИХ МАШИН
ЛАБОРАТОРНА РОБОТА №2
КОНСТРУКЦІЯ АВТОМАТИЧНИХ ПРАЛЬНИХ МАШИН
МЕТА РОБОТИ: Вивчити конструкції автоматичних побутових пральних машин, призначення та принцип дії приладів автоматики, принцип їх дії.
ЗАВДАННЯ
1.Вивчити та дати ескізи конструкції автоматичної пральної машини:
1-а підгруппа - «ARDO»
2-а підгрупа - «INDESIT»;
2.Вивчити та накреслити гідравлічні схеми (використовувати умовні позначення для гідравлічних схем) автоматичних пральних машин:
1-а підгрупа - «ARDO»
2-а підгрупа - «INDESIT»;
3.Вивчити та дати ескізи конструктивних схем приладів автоматики: датчика – реле рівня, датчика температури, датчика забрудненості мийного розчину, командоапарату.
4.Вивчити конструкцію виконавчих органів пральної машини: електродвигуна, зливного насосу, електронагрівача.
5. Експериментально визначити ефективність прання та ефективність віджиму автоматичної пральної машини “ARDO’’.
1. ТЕОРЕТИЧНІ ВІДОМОСТІ
В теперішній час пральні найпростіші пральні машини типів ПМ, ПМР та ПМН практично витіснені з ринку СНД сучасними автоматичними пральними машинами (тип ПМА по вітчизняній класифікації), різноманітність моделей яких зростає з кожним днем.
Дві основні групи, на які можна поділити автоматичні пральні машини - це машини з фронтальним та верхнім завантаженням білизни. Машини з фронтальним завантаженням бувають тільки з горизонтальним барабаном, тоді як машини з верхнім завантаженням можуть мати як горизонтальний, так і вертикальний барабан (останній тип пральних машин популярний в Америці та країнах Далекого Сходу).
Пральні машини з фронтальним завантаженням відрізняються по геометричним розмірам. Найбільш масовим є “стандартний” розмір – висота, глибина, ширина - 850 мм.* 600 мм.* 600мм. Машини,глибина яких менш 550 мм., відносять до категорії “вузьких”.
Крім габаритних та компоновочних відмінностей, автоматичні пральні машини можуть мати функцію сушки білизни.
Пральні машини з сушкою випускаються як у фронтальному виконанні стандартних розмірів (наприклад ARISTON AI 858 CTX – 850*600*550 мм.) або в вузькому варіанті (ZEROWATT TROPIC 42X – 850*600*420 мм.), так і з верхнім завантаженням білизни (BRANDT WDB 1200 з габаритами 850*450*600 см.)
Конструкція машин двох основних компоновочних схем – з фронтальним та верхнім завантаженням – відпрацьована і в певній мірі уніфікована за десятиріччя настільки, що всяке нове, нестандартне рішення, як правило особо підкреслюється фірмою-виробником.
На рис.1 показані основні елементи конструкції автоматичної пральної машини з фронтальним завантаженням (вигляд з заднього боку із знятою кришкою).
Розглянемо деякі з цих компонентів конструкції.
Корпус 28 виготовляється із сталевого листа та покривається фарбою, що стійка до лужного середовища розчинів миючих засобів. Для зниження шуму при роботі пральної машини на панелі корпусу всередині можуть наклеюватися листи звукопоглинаючого матеріалу.
Бак 6 пральної машини може виконуватися із сталевого листа (так звана “нержавіюча сталь”), або емалюватися. Нержавіючий матеріал баку (inox), як правило, відображається індексом Х в позначенні моделі машини.
В останні роки все більшого поширення набувають баки із пластмас, ці матеріали фірми-виробники називають по-різному: poliplex, carboran, silitec та ін. Пластмасовий бак дешевший, технологічніший за металевий, стійкий до корозії, проте достатньо крихкий, що призводить до поломки та тріщин.
Рис1. Конструкція автоматичної пральної машини
1 - розподільник мийних засобів, 2 – опора, 3 – пружина підвіски баку, 4 – шланг, 5 – електромагнітний клапан, 6 – бак, 7 – шків, 8, 32 – заливні шланги, 9 – термостат, 10 –ТЕН, 11 – електродвигун, 12 – зливний шланг, 13 – трубка реле рівня, 14 – пластина амортизатора, 15 – конденсатор, 16 – пружина амортизатора, 17 – фрикційний диск, 18 – зливний насос, 19 – фільтр, 20 – дренажна трубка, 21 – реле рівня, 22 – противага, 23 – командоапарат, 24 – індикаторна лампа, 25 – вимикач, 26 – ручка командоапарату, 27 – передня стінка корпусу, 28 – корпус, 29 – люк, 30 – кришка, 31 – бункер дозатора, 33 – електромагнітний клапан.
Люк 29 пральної машини (з фронтальним завантаженням) призначений для завантаження білизни. Для забезпечення безпеки користувача у всіх сучасних пральних машинах передбачене блокування дверці люка під час виконання програми.
Система підвіски баку пральної машини складається з пружин 3, якими бак кріпиться до верхньої рами корпусу та амортизаторів 16 (або стійки в більш дешевих моделях), що з’єднують бак з нижньою рамою корпусу. Призначення системи підвіски-знизити амплітуду коливань баку, що виникають при роботі машини через дисбаланс, що виникає в барабані. Для зменшення дисбалансу також до баку кріплять противагу 22, яка виготовлена з чавуну або з бетону.
Електропривід включає в себе асинхронний або колекторний двигун 11 на валу якого встановлено ведучий шків, клиновий пас та шків барабану 7.
Гідравлічна система включає в себе електромагнітний клапан 5, наливний шланг 8 та 32, розподільник миючих засобів 1, зливний насос 18 із фільтром та шлангом. В сучасних закордонних пральних машинах все більшого поширення набуває система додаткової циркуляції води. Основним її компонентом є циркуляційний насос відцентрового типу, аналогічний зливному, який вмикається одночасно з двигуном барабану та сопло, що встановлене в донній частині прального баку. Струмінь рідини, створений насосом, інтенсифікує циркуляцію миючого засобу під час прання.
До приладів автоматики відносяться: командоапарат або електронний модуль 23, датчик-реле рівня 21, датчики-реле температури 9, електронагрівач 10 та пристрій блокування люку.
Звичайно бак має форму круглого циліндру, проте в ряді моделей Candy для додаткової економії води при пранні бак має овальну форму.
Барабан завжди виготовляється з нержавіючої сталі та являє собою перфорований циліндр, в якому при пранні розміщується білизна. В машинах з верхнім завантаженням закріплені обидва кінці барабану, в машинах з фронтальним завантаженням барабан кріпиться консольно, тільки на одному кінці вісі обертання. На внутрішніх стінках барабану є три або чотири ребра, що перелопачують білизну при обертанні барабану.
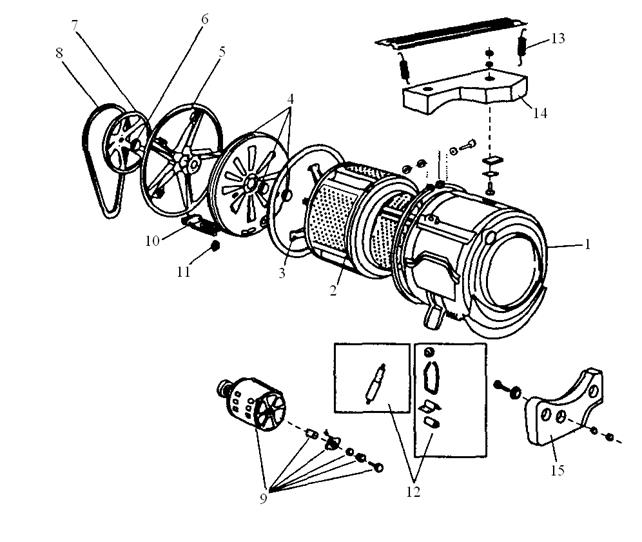
Рис.2. Конструкція вузла барабану автоматичної пральної машини:
1 – бак; 2 – барабан; 3 – суппорт барабану; 4 – задня кришка з підшипником; 5 – кронштейн; 6 – задній підшипник; 7 – шків барабану; 8 – пас; 9 – асинхронний електродвигун з тахогенератором; 10 – електронагрівач; 11 – датчик – реле температури; 12 – амортизатори; 13 – пружини; 14 – верхня противага; 15 – нижня противага.
На рис. 2 показана будова барабанного вузла пральної машини найбільш поширеної конструкції з нижнім розташуванням двигуна. В даній конструкції барабан 2 закріплений на супорті 3 з напіввіссю. Суппорт барабану 3 (хрестовина) відлитий з силуміну. На на піввісь при складанні встановлюють ущільнюючу манжету – сальник та підшипники – вони в свою чергу вставляються в центральну втулку кронштейна 5. Кронштейн 5 кріпиться гвинтами до задньої стінки 4 баку 1. Задня кришка 4 кріпиться до баку стягуючим хомутом. Зверху бак 1 підвішений на двох пружинах 13, а знизу спирається на амортизатори 12. Зверху на баці кріпиться верхня противага 14, нижня противага 15 кріпиться знизу в передній частині баку. Електродвигун 9 приводу барабану кріпиться шпильками до нижньої частини баку. Електронагрівач 10 встановлений в отвір задньої кришки 4 в нижній частині.

Рис.3. Конструкція вузла барабану автоматичної пральної машин з верхнім розташуванням двигуна :
1 – манжета люка; 2 – хомут; 3 – кришка; 4 – барабан; 5 – суппорт; 6 – сальник з переднім підшипником; 7 – бак; 8 – задній підшипник; 9 – шків барабану; 10 – пас; 11 – колекторний електродвигун; 12 – лапи кріплення; 13 – компресійна камера; 14 – амортизатор; 15 – опорна подушка; 16 – прокладка; 17 – нижня противага; 18 – елементи кріплення супорта до барабану; 19 – ТЕН; 20 – датчик – реле температури; 21 – термістор; 22, 24 – пружини центрування; 23 – верхня противага.
На рис. 3 показаний барабанний вузол автоматичної пральної машини General Electric. Він відрізняється від вузла барабану традиційної компоновки тим, що електродвигун приводу барабану 11 встановлений в верхній частині баку 7. Бак 7, передня кришка 3 баку виготовлені з пластмаси. При такій компоновці бокові пружини підвіски не потрібні – їх заміняють пружини в циліндрах амортизаторів, а пружини 22 та 24, що кріпляться до верхньої противаги, лише забезпечують додаткове центрування баку в вертикальній площині. ТЕН 19, датчик - реле температури 20 та термістор 21 електронної схеми керування встановлені в нижній частині передньої кришки 3 баку 7.

Рис.4. Пральна машина з сушкою
1 – вентилятор сушки, 2 – ТЕН, 3 – бак, 4 – барабан, 5 – шланг, 6 – конденсатор вологи, 7 – насос.
В прально - сушильній машині додатково встановлено вентилятор сушки з електродвигуном, повітряний електронагрівач, конденсатор вологи, таймер сушки, терморегулятор та термозапобіжники.
Конструкція пральної - сушильної машини зображена на рис.4.
Фірмою LG було розроблено пральну машину з прямим приводом. Ротор 6 двигуна приводу барабану такої машини кріпиться безпосередньо на валу 7 барабану замість веденого шківа. Статор 10 такого двигуна кріпиться безпосередньо до задньої стінки прального баку 2. Конструкція такої машини показана на рис.5.

Рис.5. Пральна машина LG з прямим приводом барабану.
1 – корпус; 2 – бак; 3 – барабан; 4 – пружина підвіски барабану; 5 – хрестовина барабану; 6 – ротор двигуна; 7 – вал; 8 – підшипники; 9 – корпус підшипникового вузла; 10 – статор двигуна; 11 – стійка баку; 12 – зливний насос.
Проте така конструкція має багато недоліків. Так, завдяки відсутності клинопасової передачі, що збільшує крутний момент, потрібна більша потужність двигуна для досягнення такого ж крутного моменту, що і при звичайному приводі барабану. Це спричиняє підвищене споживання електроенергії, що зменшує її економічність. Крім того, обмотки двигуна розташовані біля підшипникового вузла барабану. Вихід з ладу сальникового ущільнення цього вузла спричиняє потрапляння мийного розчину на обмотки.
СИСТЕМА КЕРУВАННЯ ТА ПРИЛАДИ АВТОМАТИКИ АВТОМАТИЧНИХ ПРАЛЬНИХ МАШИН
В сучасних пральних машинах застосовуються три види систем керування програмами обробки білизни: електромеханічна, змішанна та електронна.
В електромеханічній системі керування послідовність та тривалість операцій задається механічним пристроєм – командоапаратом.
В змішаній системі командоапарат керує електронним модулем, який в свою чергу безпосередньо керує всіма виконавчим пристроями.
Електронна система керування побудована із застосуванням мікропроцесорів і являє собою спеціалізовану мікро-ЕОМ, що керує процесами прання та віджиму.
Принцип побудови систем керування оснований на тому, що процеси обробки білизни в автоматичних пральних машинах умовно поділяються на дві групи: основні операції (попереднє та основне прання, полоскання, віджим, сушка) та операції по забезпеченню необхідних параметрів води (рівня, температури). Особливості основних та допоміжних операцій обумовлюють різні принципи керування ними. Необхідна тривалість основних операцій забезпечується відповідним числом кроків командоапарату. Керування допоміжними операціями другої групи відбувається по тим параметрам, що забезпечуються тими операціями, наприклад наповнення баку водою відбувається в залежності від рівня води в баці, нагрів розчину здійснюється до досягнення заданої температури.
КОМАНДОАПАРАТ. Послідовність та тривалість виконання заданних операцій обробки білизни здійснюється за допомогою командоапарату, який має систему контактів, перемикання яких дозволяє керувати роботою елементів складного електричного кола пральної машини. Він є основним механізмом системи керування, що координує роботу всіх виконавчих органів пральної машини шляхом замикання та розмикання контактів електричного кола через задані відрізки часу.
Кінематична схема кулачкового командоапарату показана на рис.6.

Рис.6. Кінематична схема командоапарату
1 – синхронний електродвигун; 2 – редуктор; 3-кулачковий вал, 4 – повільні кулачки; 5 – швидкі кулачки; 6 – контакти.
Командоапарат складається з кулачкового валу 3 з набором кулачків 4 та 5, контактів 6, які розмикаються чи розмикаються при повороті кулачків. Контакти розміщені на нижній та верхній клемних колодках. Обертається кулачковий вал 3 за допомогою синхронного двигуна 1, розміщеного в задній частині командоапарату, через редуктор 2. За допомогою рукоятки, що встановлюється на валу 3 та виведена на панель керування машини, відбувається установка вихідного положення кулачків в відповідності з вибраною програмою.
Кулачки діляться на дві групи:
- робочі (основні) кулачки
- допоміжні кулачки (реверсивні або швидкісні).
Робочі кулачки керують електродвигуном пральної машини, зливним насосом, вхідним електроклапаном та через датчик температури ТЕНом. Допоміжні кулачки керують зміною напрямку обертання барабану під час прання, а також спеціальними програмами прання.
Група основних кулачків приводиться в рух електродвигуном командоапарату 1 через редуктор 2 та спеціальний храповий механізм. Кулачки здійснюють дискретні повороти (кроки), причому повний оберт кулачка звичайно налічує 60 кроків.
В командоапарат може бути вмонтований і головний вимикач машини. В цьому випадку її можна вмикати та вимикати за допомогою рукоятки вибору програм, витягуючи її на себе або утоплюючи. Конструкція командоапарату італійської фірми EATON показана на рис.7.

Рис. 7. Конструкція командоапарату EATON
Корпус командоапарата утворений задньою 1 та передньою 2 платами, стягнутих між собою шпильками 3. В платах 1 та 2 є отвори, в яких обертається кулачковий вал 4. На кулачковому валу 4 розташований кулачковий набір 5. Між платами 1 та 2 встановлено контактні групи 6 та 7, що розташовані вгорі та внизу кулачкового набору 5. Кулачковий вал 4 з набором кулачків приводиться в обертання за допомогою синхронного електродвигуна 8 та редуктора 9 з храповим механізмом. Обертовий момент від електродвигуна 8 передається редуктору 9, де швидкість обертання знижується, а вмонтований храповий механізм (складається з собачки та храпового колеса 10) перетворює неперервний обертовий рух в кроковий. Кроковий обертовий рух передається від храпового колеса 10 внеденому колесу 11, далі через проміжне зубчате колесо передається кулачковому валу 4 з набором кулачків. Кулачки в свою чергу замикають контакти контактних груп 6 та 7, і таким чином відбувається реалізація програми прання. Електромагніт 12 призначений для кінематичного розчеплення кулачкового валу від приводного електродвигуна.
ДАТЧИК-РЕЛЕ РІВНЯ. Датчик-реле рівня призначений для контролю рівня води в пральному баці. Принцип роботи реле рівня (пресостату) оснований на перетворенні тиску, що створюється стовпом рідини, та діючого на мембрану, в переміщення рухомих контактів. Схема будови реле рівня показана на рис.8.

Рис.8. Датчик-реле рівня
1 – корпус; 2 - гумова мембрана; 3 – кришка зі штуцером; 4 – рухомий контакт; 5 – нерухомий контакт; 6 - перекидна пружина, 7 – протидіюча пружина; 8 - регулювальний гвинт рівня; 9 – регулювальний гвинт диференціалу.

Рис.9. Принцип дії двохрівневого датчика – реле рівня
Всі основні деталі реле рівня закріплені в корпусі 1. Між корпусом 1 та кришкою 3 розміщена гумова мембрана з жорстким центром 2, яка є чутливим елементом і поділяє реле рівня на дві камери. Одна камера є герметичною і з’єднується через штуцер з рівнем води, що контролюється. В іншій камері розташовані контакти. З мембраною 2 з’єднаний жорсткий центр зі штоком, який передає зусилля на поводок перекидної пружини 6 та на протидіючу пружину 7. Другим кінцем пружина 7 упирається в регулювальний гвинт 8. Миттєве перемикання контактів здійснюється перекидною пружиною 6. Нерухомий контакт 5 кріпиться заклепкою до корпусу 1.
Настройка на необхідний рівень спрацювання здійснюється за допомогою гвинта 8, що змінює зусилля протидіючої пружини 7.
При підвищенні рівня води підвищується тиск в каналі датчика і при певному його значенні мембрана 2 через шток перемикає рухомий контакт 4. При зниженні води в баці зменшується тиск, при певному значенні якого, яке буде дещо меншим, ніж при наповненні баку, мембрана під дією пружини 7 повертається в вихідне положення разом із контактом 4. Різниця між рівнями (тисками) рідини, що приводять до спрацювання та поверненню реле у вихідне положення, називається диференціалом реле рівня. Диференціал регулюється гвинтом 9.
В деяких моделях пральних машин закордонних фірм застосовують реле рівня, яке має два чи три рівня спрацювання. Принцип дії такого реле показаний на рис. 9.
Недоліком такого реле є наявність розривних контактів, що іскрять та створюють радіоперешкоди. Тому в останній час закордонні фірми почали застосовувати безконтактні індуктивні датчики-реле рівня. Істотною відмінністю такого реле є те, що мембрана зі штоком переміщує сталевий сердечник в зазорі катушки індуктивності і тим самим змінює індуктивність котушки, певне значення якої є сигналом електронному блоку про достаній рівень води. Електрична схема такого датчика - реле рівня показана на рис.10.

Рис. 10. Електрична схема індуктивного датчика – реле рівня з коливним контуром та генератором коливань.
В індуктивному датчику реле – рівня застосовують коливний контур. Контур підключений до схеми генератора коливань. Елементи коливного контуру – котушка, феритовий сердечник, два конденсатора розташовані в корпусі реле рівня (рис.11). При збільшенні рівня води мембрана, прогинаючись, переміщує феритовий сердечник коливного контура, в результаті чого змінюється частота коливань на виході генератора. Значення частоти, що відповідає заданим рівням, також порівнюється із запрограмованим в пам’яті мікроконтроллера.

Рис. 11. Конструкція індуктивного датчика – реле рівня
1 – корпус зі штуцером; 2 - пружина; 3 – гумова мембрана; 4 – котушка; 5 – регулювальний гвинт; 6 - пружина, 7 – феромагнітний сердечник; 8 – електронна схема; 9 – з’єднувальний роз’єм.
В пральних машинах останніх років випусків починають застосовуватися реле рівня на основі тензорезисторів. Тензорезистор – напівпровідниковий елемент, виготовлений методом напилення. Під дією мембрани відбувається прогин тензорезистора, в результаті його деформації змінюється його опір, що призводить до зміни напруги на виході електронної схеми реле рівня.
ДАТЧИК-РЕЛЕ ТЕМПЕРАТУРИ. Для контролю температури мийного розчину в автоматичних пральних машинах встановлені датчики температури біметалевого типу. Звичайно в пральних машинах встановлено три датчики на температуру спрацювання 40С, 60С та 90С. Датчики – реле температури можуть бути як з нормально замкненими контактами, так і з нормально розімкненими контактами.
Конструкція біметалевого датчика – реле температури показана на рис.12. Він складається з корпусу 1 з металевою кришкою, під якою розміщена біметалева мембрана 2, що з’єднана через шток 3 з рухомим контактом 4. В корпусі розміщені рухомий контакт 4 і нерухомий контакт 5 з клемою.
Зміна температури мийного розчину призводить до прогину біметалевої мембрани 2. При досягнені заданої температури біметалева пластина 2 прогинається і через шток 3 розмикає рухомий контакт 4. При охолоджені біметалева пластина повертається в вихідне положення і контакти замикаються.
Встановлюють датчики-реле температури в нижній частині баку за допомогою гумової втулки.

Рис.12. Конструкція датчика - реле температури
А – контакти замкнені; Б – контакти розімкнені
1 – корпус; 2 – біметалева мембрана; 3 – шток; 4 - рухомий контакт;5 – нерухомий контакт з клемою.
В деяких моделях пральних машин встановлюють подвійні захисні датчики - реле температури. Конструкція такого датчика показана на рис.13. Він складається з корпусу 1 з кришкою 2, двох біметалевих мембран 3, настроєних на різні температури спрацювання. Кожна з цих мембран 3 тисне на керамічний шток 4, який розмикає свій рухомий контакт 5.

Рис.13. Конструкція подвійного датчика - реле температури
1 – корпус; 2 – металева кришка; 3 – біметалеві мембрани; 4 – керамічні штоки; 5 – рухомі контакти з клемою; 6 – нерухомі контакти з клемою; 7 – кнопка повернення.
В сучасних пральних машинах закордонних фірм разом із біметалевими датчиками – реле температури застосовують регульовані терморегулятори манометричного типу. Принцип роботи такого термостату показаний на рис. 14. основу термостата складає гідравлічний контур, що складається з сільфону 2 та камери нагріву – термобалону 5, з’єднаних між собою капілярною трубкою 4. сильфон 2 розміщений в корпусі 1 терморегулятора а термобалон 5 встановлений на баці ПМА в спеціальному отворі через гумову прокладку. Всередині гідравлічного контура знаходиться фреон. При нагріванні термобаллону тиск газу зростає, сильфон 2 розширюється та переміщує важіль 3, який перемикає контакти. Установка заданої температури здійснюється ручкою, встановленої на осі 6 регулювання регулювання температури.

Рис.14. Принципова схема манометричного терморегулятора
1 – корпус; 2 – сильфон; 3 – важіль; 4 – капілярна трубка; 5 – термобаллон; 6 – вісь регулювання температури.
Вісь 6 має гвинтову різьбу, завдяки чому вона при обертанні рухається вгору або вниз відносно корпусу 1 терморегулятора. Нижнім торцем вісь 6 з’єднана з сильфоном 2. При обертанні вісь 6 переміщується, переміщується і з’єднаний з нею сильфон, таким чином регулюється задана температура перемикання контактів терморегулятора.

Рис.15. Конструкція напівпровідникових датчиків температури:
1 – корпус; 2 – терморезистор; 3 – виводи; 4 – заливка.
В пральних машинах з електронним модулем керування для контролю температури застосовують напівпровідникові датчики температури. В таких датчиках чутливими елементами температури слугують NTC – термістори. Конструкція таких датчиків показана на рис.15. В корпусі 1 з металу або теплостійкої пластмаси знаходиться терморезистор 2 з негативним температурним коефіцієнтом опору. При збільшенні температури терморезистор зменшує свій опір в десятки разів. Датчик встановлюють в отворі прального баку так, щоб корпус датчика, в якому знаходиться терморезистор, контактував з мийним розчином в пральному баці. Принцип вимірювання температури – по суті вимірювання опору шляхом порівняння вимірюваної величини із еталонною мірою за допомогою моста Уітстона. Така схема контролю температури показана на рис. 16.

Рис.16. Схема виміру температури мийного розчину в баці ПМА:
Т1 – трансформатор блоку живлення; VD1-VD4 – випрямляч блоку живлення; R1 - R4 – опори мостової схеми; IC1 – операційний підсилювач; К1 – котушка виконавчого реле; К1.1. – контакти виконавчого реле; Rt – термістор датчика температури; SA1 – перемикач задатчика температури.
В деяких пральних машинах останніх випусків з електронним керуванням встановлюється додатково датчик прозорості мийного засобу. Конструкція такого датчика з інтегрованим датчиком температури показана на рис. 16. Він представляє собою оптичну пару, що складається з інфрачервоного світлодіоду 3 та фоторезистора 4. При забрудненні мийного розчину його прозорість зменшується, світловий потік від світлодіода 3 до фоторезистора 4 зменшується, і опір фоторезистора зростає. Сигнал з фоторезистора поступає в електронну схему керування.

Рис. 16. Фотоелектричний датчик забрудненості мийного розчину
1 – корпус; 2 – кришка корпусу; 3 – світлодіод; 4 – фоторезистор; 5 – датчик температури; 6 – термопаста; 7 – виступ корпусу; 8 – сепаратор; 9 - 11 – друкована плата; 12 – суппорт.
ВИКОНАВЧІ ПРИСТРОЇ АВТОМАТИЧНИХ ПРАЛЬНИХ МАШИН
До виконавчих пристроїв належать електродвигун приводу барабану, зливний насос, електронагрівач (ТЕН) та електромагнітний клапан.
Електродвигун барабану. Електродвигун обертає барабан пральної машини при всіх режимах її роботи. Крутний момент від шківу електродвигуна передається приводним пасом до шківу барабану. На пральні машини машини встановлюють електродвигуни двох типів: асинхронні та колекторні. До теперішнього часу встановлювалися асинхронні конденсаторні двигуни. Частота обертання асинхронного двигуна складає 2800 об/хв. та визначається кількістю пар полюсів. Суттєвим недоліком асинхронного двигуна є неможливість досягнення частоти обертання вище 3000 об/хв. при стандартній частоті мережі живлення а також неможливість плавного регулювання частоти обертання.
Конструкція асинхронного двохшвидкісного електродвигуна для приводу барабану показана на рис.17. Основними частинами асинхронного електродвигуна є статор, розміщений в сталевому корпусі 6, і ротор 4. Ротор 4 обертається в підшипниках 2 та 5, що встановлені відповідно в передній 1 та задній 7 підшипникових кришках. На валу ротора 4 встановлюють вентилятор 3 для охолодження обмоток.

Рис.17. Асинхронний електродвигун приводу барабану
1 – передня підшипникова кришка; 2 – підшипник; 3 – вентилятор; 4 – ротор; 5 – підшипник; 6 – корпус зі статором; 7 – задня підшипникова кришка.
Підшипникові кришки 1 та 7 кріпляться до корпусу статора за допомогою відгину частини корпусу. В електродвигунах більш ранніх конструкцій вони стягуються до корпусу шпильками з гайками. На задній підшипниковій кришці 7 в деяких моделях двигунів встановлюють синхронний тахогенератор.
Колекторні двигуни використовуються на пральних машинах з високою частотою обертання барабану в режимі віджиму. Найбільш поширеними є колекторні двигуни змінного струму, проте в найновіших закордонних моделях пральних машин встановлюють колекторні двигуни постійного струму із постійними магнітами. Всі моделі колекторних двигунів мають вмонтований тахогенератор для контролю частоти обертання. Перевагами колекторних двигунів є можливість досягнення високих частот обертання та плавного керування швидкістю. Типовий колекторний двигун з тахогенератором показано на рис.18. Колекторний двигун складається зі статора 1 з обмоткою збудження 2 та якоря, що обертається в підшипниках, встановлених в передній та задній підшипникових кришках. Для підводу струму до обмоток якоря слугують колектор 3 та щітки, що встановлені в щіткотримачах 4. Щіткотримачі 4 встановлюються на задній підшипниковій кришці. Задня підшипникова кришка має кільцьовий прилив, в якому встановлюється статор 5 з обмоткою тахогенератора. Ротор 6 тахогенератора, що являє собою постійний магніт, кріпиться гвинтом безпосередньо на валу якоря двигуна із заднього його кінця.

Рис.18. Колекторний електродвигун приводу барабану з тахогенератором
1 – пакет статора; 2 – обмотка збудження; 3 – колектор якоря; 4 – щіткотримачі зі щітками; 5 – статор тахогенератора; 6 – ротор тахогенератора.

Рис. 19. Електрична схема колекторного електродвигуна приводу барабану з тахогенератором
При обертанні циліндричного магніту всередині обмотки з полюсними наконечниками на виході останньої генеруються імпульси напруги синусоїдальної форми. Частота та амплітуда їх пропорційна частоті обертання якоря двигуна. Далі ці імпульси поступають на електронний модуль і спочатку подаються на вхід схеми формувача. Схема формувача показана на рис.20.

Рис.20. Схема формувача імпульсів
Імпульси синусоїдальної напруги поступають на вхід схеми формувача: спочатку на подільник напруги, що складається з двох резисторів. Потім сигнал обмежується по амплітуді за допомогою діода та додатково обмежується та підсилюється транзистором. Підсилений сигнал далі поступає на вхід мікроконтроллера (спеціалізованої мікросхеми). У відповідності до закладеної програми мікроконтролер порівнює тривалість поступаючи імпульсів та подає на симістор, який керує напругою живлення двигуна, відповідні імпульси керування. Також на основі даних, отриманих з тахогенератора, мікроконтроллер визначає ступінь дисбалансу барабану з білизною. Перед початком віджиму барабан прокручується спочатку в один бік ( наприклад, білизна піднімається вгору), потім в інший (білизна падає вниз). Мікроконтроллер порівнює тривалості імпульсів цих обертань і у відповідності з програмою «приймає рішення»: продовжити віджим (обертання), збільшити швидкість обертання або припинити і почати заново розкладку білизни в барабані.
Зливний насос. Призначений для зливу відпрацьованого мийного розчину з баку пральної машини. Насос складається з електродвигуна та відцентрового насосу, що кріпиться до фланцю електродвигуна.

Рис.21. Зливний насос з фільтром
Набільш широко для приводу зливного насосу застосовують асинхронний електродвигун з екранованими полюсами. Крильчатка насосу насаджена на вал електродвигуна. Ущільнення валу двигуна здійснюється сальником. Додатково в деяких моделях насосів встановлюють фільтр для запобігання попадання в насос різних предметів. Конструкцію насосу сальникового типу зображено на рис 22.

Рис.22. Зливний насос сальникового типу (фірма BRANDT, Франція)
1-вал, 2-підшипниковий щит, 3-ротор, 4-пакет статора, 5-обмотка статора, 6-клемна колодка, 7-підшипниковий щит, 8-сальник, 9-крильчатка насоса, 10-корпус насоса,11-короткозамкнений виток, 12-вентилятор двигуна.
Недоліком такого типу насосів є швидке зношування сальника, що спричиняє потрапляння води на статор двигуна, внаслідок чого відбувається корозія пакету статора та виникає небезпека короткого замикання при попаданні води на обмотки двигуна.
Цих недоліків позбавлений насос, розроблений італійською фірмою ASCOLL (рис.23).

Рис.23. Зливний насос фірми Ascoll, Італія
1-корпус підшипника, 2-корпус двигуна, 3-обмотка статора, 4-пакет статора, 5-клемна колодка, 6-гумова прокладка, 7-крильчатка.
Особливістю даної моделі є те, що по суті він являє собою єдиний вузол – мотор-насос. В ньому ротор двигуна розміщений в герметичному корпусі 2, на який насаджено пакет статора 4 з обмоткою 3. Така компоновка виключає потрапляння води з насосу на статор, спрощується також конструкція підшипникових вузлів двигуна. На відміну від насосу традиційного типу, що зображено на рис.8, двигун такого насосу являє собою синхронний двигун з ротором-постійним магнітом.
Конструкція електродвигуна такого насосу показана на рис. 24. В корпусі 3 розміщений ротор 5. Ротор 5 встановлений на валу 6 із нержавіючої сталі. Ротор 5 обертається в підшипниках ковзання 7 та 9. Задній підшипник 7 запресований в корпусі 3, а передній 9 встановлений в підшипниковому щиті 10. Підшипниковий щит 10 встановлений у фланці 1 корпусу 3. На кінці валу 6 ротора 5 встановлена ступиця крильчатки 13 з крильчаткою 4. Зовні корпусу 3 встановлено пакет статора 2 з обмоткою.
Для запуску електродвигуна пакет статора має полюси, які розміщені асиметрично відносно ротору. Така конструкція дозволяє отримати початковий пусковий момент без застосування додаткових пускових елементів.

Рис.24. Конструкція електродвигуна зливного насосу фірми Ascoll (Італія)
1- фланець, 2-пакет статора, 3- корпус , 4- крильчатка, 5- ротор, 6- вал, 7- задній підшипник; 8 – втулка крильчатки; 9 – передній підшипник; 10 – передній підшипниковий щит; 11 – прокладка; 12 – хвостовик валу; 13 – ступиця крильчатки.
В деяких пральних машинах активаторного типу з донним розташуванням активатора застосовуються зливні насоси так званого інтегрованого типу, для приводу яких застосовано безколлекторний двигун постійного струму. Конструкція такого насосу показана на рис. 25.

Рис.25. Конструкція зливного насосу інтегрованого типу з безколекторним двигуном постійного струму
1- фланець, 2-нагнітальний штуцер; 3- вал ротора; 4- ротор; 5- підшипниковий щит; 6- крильчатка (6а, 6б – лопасті крильчатки), 7 - бронзографітний підшипник ковзання; 8 – корпус насосу; 9 – шліци корпусу; 10 – пази корпусу статора; 11 – корпус статора; 12 – магнітопровід статору; 13 – котушка статору; 14 – основа корпусу двигуна; 15 – кришка корпусу насосу; 16 – стінка кришки корпусу насосу; 17 – фігурний бурт верхньої кришки; 18 – верхня кришка; 19 – ребро жорсткості верхньої кришки; 20 – всмоктувальний канал; 21 – отвори для гвинтів кріплення; 22 – ущільнювальне кільце; 23 – гвинти кріплення.
Безконтактний електродвигун такого насосу керується спеціальним електронним комутатором, аналогічно двигуну прямого приводу пральної машини LG. Ротор 4 такого двигуна являє собою постійний магніт, що встановлений на валу 3. На кінці валу встановлена крильчатка 6 насосу. Вал 3 обертається в підшипнику ковзання 7, що встановлений в підшипниковому щиті 5. Підшипниковий щит вставляється в отвір корпусу насосу 8. Із зовнішнього боку нижньої частини корпусу насосу кріпиться корпус 11 статора із магнітопроводом статора 12. На полюсах магнітопроводу статора розміщені обмотки статора.
Перевагою такого типу насоса є те, що завдяки електронному регулюванню можна плавно регулювати оберти крильчатки насоса, а значить, і його продуктивність. Недоліком є його висока вартість.
Електронагрівач (ТЕН) являє собою спіраль, розміщену в захисній трубці. Деякі моделі ТЕНів мають вмонтований тепловий вимикач, що відключає його при перевищенні температури. Потужність ТЕНа близько 2000 Вт. Розташований ТЕН в нижній частині прального баку. Конструкція ТЕНу зображена на рис.26

Рис.26. Електронагрівач
Електромагнітний клапан (рис.11) призначений для відкриття подачі води в пральну машину при заповненні баку та перериванні її в необхідний момент часу. Нормальним положенням клапану є закрите.При вмиканні клапану під дією магнітного поля котушки електромагніту відбувається втягнення в неї сердечника.В цей момент відкривається прохідний отвір клапану, та починається подача води в бак. Після заливу потрібної кількості води відбувається розмикання електричного кола котушки, і сердечник під дією пружини опускається, перекриваючи прохідний отвір.

Рис.27. Електромагнітний клапан
Основними параметрами, що характеризують якість прання в пральних машинах, є ефективність прання та ефективність віджиму.
Ефективність прання – здатність машини при одночасних механічних, хімічних та теплових впливах прати дослідні зразки тканини при номінальному завантаженні та заданих умовах.
Ефективність прання визначають шляхом визначення коефіцієнту відбиття фотоколометричним методом на дослідних зразках тканини з різними видами забруднень. Ефективність прання, % , для кожного виду забруднення визначають по формулі:
 ,
,
де xzi – загальне середнє арифметичне коефіцієнтів відбиття для і-того виду забруднення на зразках до прання, % ; xvi - загальне середнє арифметичне коефіцієнтів відбиття для і-того виду забруднення, визначене на зразках після прання, % . xn – загальне середнє арифметичне коефіцієнтів відбиття для чистого зразку до забруднення.
Ефективність віджиму характеризує остаточну кількість води у зразках тканини після центрифугування або віджиму за допомогою валків по відношенню до маси сухого завантаження та визначається за формулою:
 ,
,
де М1 – маса сухого завантаження, кг; М2 – маса завантаження після віджиму, кг.
ПРАКТИЧНА ЧАСТИНА
1.ПОРЯДОК ВИКОНАННЯ РОБОТИ
1.По методичному посібнику, плакатам, стендам та наявній літературі вивчити конструкцію автоматичних пральних машин «АРДО» та «Вятка-автомат» та її елементів.
2.Перевірити відсутність видимих пошкодень електричної проводки та водопровідних шлангів машини.
3.Перевірити установку машини на «0».
4.Підключити машину через вимірювальний комплект К-50 до мережі.Відкрити водопровідний кран підводу води.
5.За вказівкою викладача встановити программу роботи машини перемикачем командоапарату.
6.Закласти попередньо взважену порцію білизни в машину.
7.Ввімкнути машину в роботу.
8.Під час роботи машини вимірювати такі параметри: напругу в мережі, споживаний машиною струм, споживану з мережі потужність – після кожного переходу КА на нову позицію, температуру води в баці машини після відключення ТЕНу; рівень води – після заливу води в машину.Результати вимірів занести в табл.1.
9.Вимкнути машину після її зупинки.
10.Вийняти білизну з барабану. Визначити вагу білизни після віджиму.
11.Відкрити кришку машини для сушки.
12.Оформити протокол роботи.
2.ВИМОГИ ДО ЗВІТУ
Звіт по роботі повинен містити:
1.Ескіз конструкцій пральних машин
2.Ескіз конструкцій приладів автоматики та виконавчих органів пральних машин
3.Таблицю вимірів:
Табл.1
| Крок КА | Час: год, хв., сек | Напруга мережі, В | Струм, А | Потужність, Вт | Режим реверсування | Темп.води, С | Рівень розчи-ну | Машинна операція |
3.КОНТРОЛЬНІ ПИТАННЯ
1. На які типи поділяються автоматичні пральні машини?
2. В чому полягає відмінність автоматичної пральної машини від пральних машин напівавтоматичного типу?
3. В чому полягають переваги барабанного типу активації мийного розчину?
4. Призначення та будова командоапарату. Його переваги та недоліки.
5. Які типи датчиків рівня застосовують в пральних машинах?
6. Які двигуни застосовують для приводу барабану пральних машин? В чому їх переваги та недоліки ?
7. Які двигуни застосовують для приводу зливних та циркуляційних насосів пральних машин? В чому їх переваги та недоліки ?
8. Принцип роботи та будова датчика прозорості мийного розчину.
9. Принцип роботи та будова датчика температури мийного розчину.
4.ЛІТЕРАТУРА
1. Лебедев Д. А. Анатомия стиральных машин. М.: 2008 – 100 с.