Двигательный и тормозной режимы работы электрической машины
Одним из достоинств электрических машин является их обратимость.
 В зависимости от направления потока мощности и энергии различают двигательный режим электрической машины, когда механическая энергия от элекродвигателя передается исполнительному органу рабочей машины, и тормозной (генераторный) режим, соответствующий обратному направлению механической энергии.
В зависимости от направления потока мощности и энергии различают двигательный режим электрической машины, когда механическая энергия от элекродвигателя передается исполнительному органу рабочей машины, и тормозной (генераторный) режим, соответствующий обратному направлению механической энергии.
|
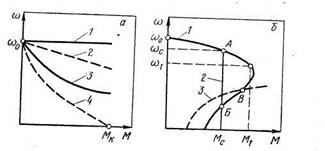
На рис. 3,6 представлены механические
характеристики двигателя (кривая 1) и двух
механизмов. Момент первого механизма от скорости не зависит (прямая 2). При моменте двигателя, равном моменту нагрузки механизма Мс, электропривод работает с установившейся скоростью с (точка А). Если под влиянием какого-либо воздействия угловая скорость уменьшится до 1, то момент двигателя возрастет и станет больше статического момента Мс. Под воздействием возникшего положительного динамического момента МД = М1—Мс привод начнет разгоняться и угловая скорость возрастает до ее исходного значения сос. При увеличении угловой скорости выше сос возникает отрицательный динамический момент, снижающий скорость привода до исходной. Следовательно, при работе в точке А привод статически устойчив.
Работа в точке Б будет неустойчивой. При уменьшении скорости возникает отрицательный динамический момент, который будет способствовать ее дальнейшему уменьшению.
Однако работа на нижней ветви механической характеристики может быть устойчивой, если характеристика механизма будет, например вентиляторной (кривая 3). Если при работе в точке В скорость, например, уменьшится, то возникший динамический момент будет положительным и скорость снова возрастет до исходной величины, соответствующей точке В.
Тормозные режимы широко используются при 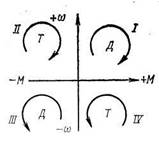 работе электропривода, например при спуске грузов, для быстрой остановки механизма и т. п.
работе электропривода, например при спуске грузов, для быстрой остановки механизма и т. п.
Одним из существенных преимуществ электрического торможения привода перед механическим является возможность более точного дозирования величины тормозного момента, плавность, удобство автоматизации, отсутствие изнашивающихся колодок и т. п. Мощность двигателя
| Рис. 4. Области двигательного и тормозного режимов в координатах М |
Р и момент М на его валу связаны соотношением М=М /103

|
С учетом знаков это выражение может быть записано
(8)
Как отмечалось, в двигательном режиме электрическая машина является потребителем электроэнергии, что соответствует положительному значению мощности. В генераторном режиме электрическая машина является источником электроэнергии и мощность будет отрицательной. Анализируя уравнение (8) в координатах — М (рис. 4), видим, что в квадрантах / и /// знаки угловой скорости и момента совпадают, мощность положительна, следовательно, это двигательный режим. В квадрантах // и IV знаки скорости и момента противоположны, мощность электродвигателя отрицательна, следовательно, это режим тормозной. Существуют три способа электрического торможения электродвигателей:
1) рекуперативное с отдачей энергии в сеть, при этом электрическая машина работает генератором. Она преобразует механическую энергию в электрическую и отдает ее в сеть. До
стоинством рекуперативного торможения является высокая экономичность;
2) противовключением, имеет место в случае, когда двигатель под воздействием сил, действующих со стороны рабочего механизма, вращается в направлении, противоположном тому,
на которое он включен;
3) динамическое, характеризующееся тем, что электрическая машина работает генератором на реостат.