Агрегатно-модульные автоматизированные системы.
Активный раздаточный материал
КАЗАХСКАЯ ГОЛОВНАЯ АРХИТЕКТУРНО-СТРОИТЕЛЬНАЯ АКАДЕМИЯ
| «Автоматизация систем ТГВ» | ФОС |
| 2 - кредита | 2016-2017 учебный год |
| Лекция №3 - Манипуляторы в автоматизированном производстве | Ассистент профессора Айтмагамбетова Ляззат Сериковна |
Краткое содержание лекции
Манипуляторы в автоматизированном производстве.
Система автоматического производства детали может быть разделена на несколько основных подсистем, в числе которых важное место принадлежит подсистеме манипулирования обрабатываемыми деталями.
Под манипулированием понимается ориентация определённым образом в пространстве детали, съём её и установка на раб. позиции, транспортирование. В общем случае, манипуляторы при свободном перемещении раб. Органа представляют собой пространственный механизм с разомкнутой кинематической цепью. Его звенья связаны кинематическими парами – вращательными или поступательными, оснащёнными приводами.
Промышленные роботы в автоматизированном производстве.
Пром. роботом принято считать манипулятор, выполняющий физические функции человека в производственных условиях, оснащены системой управления, информации.
По сравнению с другими средствами автоматизации ПР явл-ся универсальными и наиболее эффективно применяются в гибком автоматизированном производстве, т.к. обладают свойством быстрой переналадки к меняющимся условиям
производства.
Существует три поколения промышленных роботов, характеризуемых уровнем организации системы управления.
ПР первого поколения работают по жёсткой программе, составленной оператором для конкретных условий тех. процесса.
ПР второго поколения могут самостоятельно адаптироваться к изменениям внешней среды, т.е. обладают свойством самоорганизации.
ПР третьего поколения обладают свойствами искусственного интеллекта.
ПР в настоящее время применяются для выполнения основных технологических операций и вспомогательных операций.
Возможность использования ПР в конкретных тех. процессах определяется его технологическими или эксплутационными характеристиками – паспортными характеристиками.
- грузоподъёмами; - степенью подвижности; - величинами перемещений;
- скоростями перемещения каждой степени подвижности;
- погрешностью позиционирования; - количество манипуляторов с ЗУ;
- формой рабочей зоны;
- системой координат в которой работает робот.
Конструкторские особенности ПР.
Агрегатно-модульные автоматизированные системы.
Последнее время при разработке новой техники получил широкое распространение агрегатно-модульный принцип. Сущность модульного принципа состоит в построении унифицированных механических, аппаратных и программных
частей, в частности ПР из более мелких унифицированных частей – элементов.
Крупные модули, которые позволяют осуществлять различные компановки из некоторого их набора.
Унификация – это наиболее эффективный метод стандартизации, заключающийся в рациональном сокращении числа объектов одинакового и функционального назначения с целью повысить производительность труда (в том числе инже-
нерно-констр.), экономическую эффективность, улучшить качество и обеспечить взаимозаменяемость.
Система таких модулей обычно строится по иерархическому многоуровнему принципу, сверху до низу, когда внизу элементы, а вверху агрегат. С применением модульного принципа создаются следующие возможности – преимущества:
- сокращение цикла разработки ПР – изготовление, внедрение ПР; оборудования, т.к. при его создании используются готовые унифицированные модули;
- расширение области применения оборудования;
- снижение стоимости разработки, изготовления и внедрения оборудования,
скомпанованного из серийно выпускаемых модулей.
Недостатки агрегатно-модульного принципа:
- разработка механической системы из ограниченной номенклатуры деталей, узлов и модулей, иногда может привести к неоправданному снижению функциональных возможностей;
- получение заданной траектории движения исполнительных органов с помощью имеющихся простейших узлов, каждый из которых, обеспечивает один или два движения, может вызвать утяжеление конструкции, увеличение числа
стыков (большое кол-во звеньев), снижение жёсткости, ухудшения динамических характеристик и точностных параметров. В некоторых случаях идут на решения менее выгодные с конструкторской точкой зрения, но более соответ-
ствующим принципам агрегатно-модульного построения и получая при этом преимущества по другим направлениям.
Частным случаем модуля является агрегат. Он представляет собой унифицированную сборочную единицу определённого функционального назначения.
Примером агрегатного построения явл-ся агрегатные станки. Рассмотрим пути реализации модульного принципа на примере построения механической части (ПР – манипулятор).
Унификация манипуляторов определяется на основе следующих основных принципов:
1. Однообразие конструкций – это значит создание развёрнутой по двум направлениям системы модулей. По вертикали – уровень сложности модуля. По горизонтали – количество типоразмеров модуля данного уровня и назначения.
2. Обеспечение максимально возможной конструктивной независимости модулей от вида используемой в них энергии (гидро пневмо электро) и от способа управления (цикловой, позиционный, контурный).
3. Модуль должен обладать максимальной функциональной и конструктивной законченностью и быть автономными.
4. Наличие системы базовых модулей и ограниченного числа их типоразмеров.
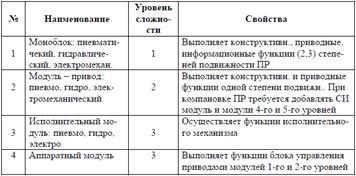
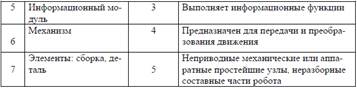
Типовой состав модуля в общем виде можно представить в три уровня:
- агрегат;
- модуль;
- элемент.
Каждый из уровней делится на подсчёт:
1. Механический.
2. Управляющий.
3. Информационно-измерительный.
Рассмотрим состав.
Унификация устройств управления на основе модульного принципа позволяет создать средства управления и контроля оборудования на базе единой системы модулей и унифицированного интерфейса. Основными принципами создания такой системы модулей явл-ся:
- иерархическая структура системы;
- проблемная ориентация модулей на решение задач управления и контроля;
- функциональная ориентация, т.е. специализация модулей для наиболее эффективного выполнения определённых функций;
- структурно-логическое соответствие функциональных свойств модулей;
- незамкнутость системы модулей, т.е. возможность наращивать как уровни, так и функциональный набор модулей каждого уровня и направления.
Пример: силовые головки, поворотные столы, основа агрегатных многошпиндельных, многоинструментальных специальных автоматов и полуавтоматов.