Дослідження можливостей, які дає ускладнення алгоритма регулятора
до пропорційно-інтегрально-диференційного (ПІД)
Мета роботи: дослідити, які переваги або недоліки пов’язані із зостосуванням в АСР
ПІД-регулятора як такого, який має три параметри налагодження.
1. Теоретичне посилання. Наступним по складності структури після ПІ-регулятора є
ПІД –регулятор. У формальному вигляді він має просту передатну функцію:
Wp(s) = kp(1 + 1/Tis + Tds) ( 1 ).
Структура ПІД-регулятора також може бути представленою як паралельно-погоджене поєднання трьох ланок: пропорційної, інтегральної та діференційної, а загальна крива розгону - як сума кривих розгону цих ланок. Треба лише зважати на те, що диференційна ланка навіть на моделі не може бути представлена як ідеальна, а лише як реальна (Рисунок 1):

Рисунок1. Структура та крива розгону ПІД-регулятора.
Параметри ПІД-регулятора визначаються з його передатної функції та з кривої розгону. Їх назва: kp - коефіцієнт передачі, Ti - час ізодрому, Td - час диференціювання, або час упередження. Співвідношення між останніми параметрами не може бути вільним. Якщо воно не виходить за межі Td =(0.1-0.4)Ti, то крива розгону має такий вигляд , як це показано на Рисунку 1 б).
Істотним є таке припущення. Оскільки у складі ПІД-регулятора застосовано три ланки, які, відповідно, мають три параметри налагодження, то показники якості перехідного процесу у АСР повинні бути кращими, ніж у всіх попередніх випадках. Нагадаємо, що всі регулятори, які застосовувались раніше (П, І та ПІ), були менш складними.
Між тим, більша складність регулятора призводить до того, що у тій же мірі ускладнюється задача його налагодження. Складність починається з того, що загальний аналітичний розрахунск параметрів ПІД-регулятора можливий не завжди. Наприклад, якщо керований процес має малу інерційність, то алгоритм розрахунку може втратити стабільність. У цих умовах точна оптимізація параметрів неможлива, їх значення беруть за даними таблиць, номограм або просто приймають як максимально прийнятні параметри для даного регулятора. Якщо ж процес досить інерційний або має суттєве чисте запізнення, то задача має точне рішення. Як і у попередніх випадках, будемо вирішувати її у частотному просторі.
Наприклад, виконаємо оптимізацію параметрів ПІД- регулятора для випадка, коли процес описується моделлю з двох елементарних ланок: інтегральної та чистого запізнення. Цей випадок є відносно простим:
Wo(s)=(k/s)e-s = (1/p)e-s ( 2 ).
Як і раніше, розрахунок будемо вести за методом розширених КЧХ (РКЧХ).
Але спочатку треба записати характеристичне рівняння замкненої АСР:
1 + Wp(s)Wo(s)=0. ( 3 ).
Далі запишемо вираз для РКЧХ ПІД-регулятора:
Wp(m,)= p(m,)e-j(m,);
( 4 )
та РКЧХ моделі керованого процесу:
Wo(m,)=Mo(m,)e-j(m,) ( 5 ).
Із записів видно, що обидві характеристики записані у даному випадку у полярних координатах, тобто через модуль та аргумент. Далі діють наступні умови. Із виразу ( 3 ) одержимо:
Wp(m,)= -1/Wo(m,) ( 6 ),
а з умови рівності двох комплексних чисел, після складних перетворень:
kp/Ti=[Tp2(1-m2)(cos()-msin()]/em +kpTd(1+m2)2;
kp=Tp[2mcos() + (1-m2)sin()]/em +2kpTdm ( 7 ).
Ця система складається з двох рівнянь, тому не може бути вирішеною прямим шляхом - до неї входять три невідомі параметри: kp; Ti; Td.
З цієї причини необхідно, зазначивши постійне значення часу діференціювання
та тим самим перетворивши систему на визначену (за Діофантом), виконувати варіювання колової частоти та побудову залежності kp/Ti та kp при постійному значенні kpTd . Закінчивши обчислення та одержавши значення екстремуму кривої, зазначити наступний розмір kpTd та повторити процедуру. Виконавши обчислення для декількох значень kpTd , треба розглянути, для якого випадку екстремум буде глобальним, тобто найбільшим відносно kp/Ti . Цей випадок дає рішення задачі, із нього визначаються оптимальні параметри налагодження ПІД-регулятора:
 .
.
Рисунок 2. Розрахункова оптимізація параметрів налагодження ПІД-регулятора для керування астатичним об’єктом. Модель об’єкта: Wo(s)=(1/Tps )e-s .
Розрахункові змінні мають таку відповідність: T=Tp; S=kp/Ti; Z=kp; c=kpTd.
Трасування кривої з метою пошуку її екстремуму дає лише проміжний результат оптимізації параметрів ПІД-регулятора. Для одержання кінцевого результату потрібно варіювання параметру kpTd.
Згідно з кінцевим результатом оптимізації одержано: kp=2.1; Ti=2.8/0.24=11.7 c.; Td=3/2.8=1.07.
Якщо характеристики керованого об’єкту відрізняються від тих, які розглянуто у даному прикладі, задачу треба кардинально переглядати. Це пояснює, чому на практиці доволі рідко користуються точною оптимізацією параметрів ПІД-регулятора, а задовольняються наближеними розрахунками, які дають не оптимальний, а так званий квазиоптимальнийрезультат.
Наприклад, для моделі процесу у складі: послідовне поєднання інерційної ланки першого порядку та ланки чистого запізнення ( А.П.Копелович):
Wo(s) =kMe-s/(Ts + 1) ( 8 ),
параметри ПІД- регулятора можна визначати за емпірічними формулами:
| параметр | m = 0.22 | m =0.30 | m =0.48 |
| kp | 1.4/(/T) | 1.1/(/T) | 0.6/(/T) |
| Ti | 1.6 | 2.0 | 5.0 |
| Td | 0.5 | 0.4 | 0.2 |
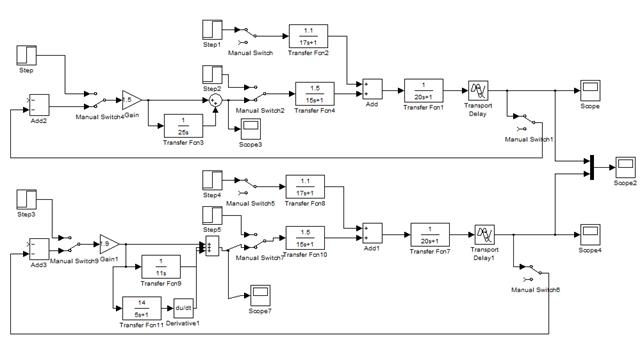
Рисунок 3. Схема моделювання АСР для дослідження ПІД-регулятора, який поєднаний зі статичним агрегатом. Паралельно з ним діє ПІ-регулятор

Рисунок 4. Схема моделювання АСР для дослідження ПІД-регулятора та порівняння його дії з дією ПІ-регулятора (схема АСР з ПІ-регуляторм зверху). Статичний агрегат перетворено на астатичний.

Рисунок 5. Типові перехідні процеси регулювання в АСР з ПІД- та ПІ-регуляторами. Перехідні процеси наведено орієнтовно, для кожного з варіантів вони потребують уточнення.
2. Завдання для дослідження:
- уважно розглянути надісланий Вам варіант системи автоматичного керування, де у якості керованого застосовано статичний агрегат, маючий чисте запізнення;
- простежити, за власним планом, які властивості мають основні канали збурення або регулювання, які властивості мають ПІ- та ПІД регулятори;
- замінивши базовий керований процес на інтегральний, теж за власним варіантом, виконати розрахунок оптимальних параметрів ПІД-регулятора;
- виконати моделювання структури АСР, встановити оптимальні параметри на моделі регулятора та перевірити якість перехідного процесу;
- провести варіювання параметрів налагодження та виявити вплив кожного з них на два показники якості ПП регулювання (за власним вибором);
- зібрати всі результати у звітний протокол, зробити поміркований висновок, згідний з теоретичним посиланням;
- захистити виконане завдання.