Тиристорный преобразователь типа ЭПУ – 1
Для управления скоростью электропривода выбираем систему ТП-Д


2 ФУНКЦИОНАЛЬНАЯ СХЕМА ЭЛЕКТРОПРИВОДА И ЕЕ ОПИСАНИЕ
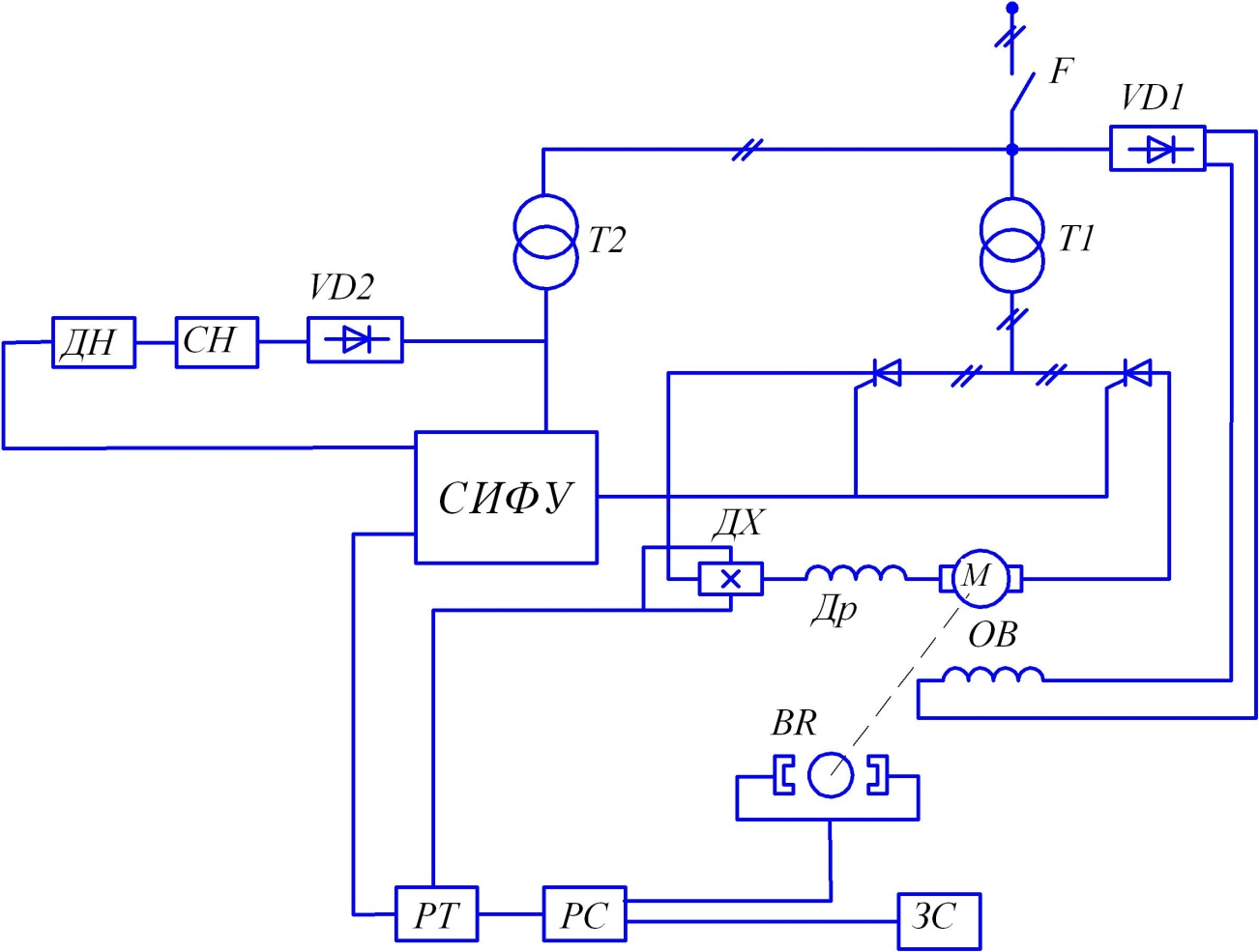
Рисунок 2.1 – Функциональная схема электропривода
Структурная с
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
При наличии рассогласования по скорости Du, между сигналами задания UЗ и обратной связи по частоте вращения uТГ на выходе AR появляется управляющее напряжения UРС, которое сравнивается с напряжением UДТ пропорциональным текущему значению тока якоря электродвигателя. Напряжение рассогласования по току DU2 поступает на вход AA, что вызывает появление на его выходе соответствующего управляющего напряжения UРТ,
которое управляет схемой импульсно-фазового управления (СИФУ). СИФУ обеспечивает формирование и распределение импульсов управления силовыми тиристорами управляемого выпрямителя УВ. СИФУ и УВ входят в состав тиристорного преобразователя ТП. По мере уменьшения рассогласования (за счет действия отрицательной обратной связи по скорости) происходит стабилизация частоты вращения электродвигателя n на уровне, пропорциональном значению напряжения задания UЗ. Коэффициент усиления системы регулирования обеспечивает необходимый диапазон регулирования и точность поддержания частоты вращения электродвигателя при различных возмущающих воздействиях.
Для обеспечения надежной и безопасной работы электропривода предусмотрено наличие: схемы ограничения тока якоря двигателя в динамических режимах; схемы ограничения минимального угла регулирования УВ; схемы защиты.
ЗС – задатчик скорости;
РС – регулятор скорости;
РТ – регулятор тока;
BR – тахогенератор;
ОВ – обмотка возбуждения двигателя;
ДХ – датчик холла;
Др – дроссель;
ДН – делитель напряжения;
СН – стабилизатор напряжения;
VD1, VD2 – выпрямители;
Т1, Т2 – трансформатор;
F – автоматический выключатель.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
3 РАСЧЕТ СИЛОВОЙ ЧАСТИ ПРЕОБРАЗОВАТЕЛЯ 3.1 Расчет трансформатора
ЭДС двигателя в режиме стабилизации скорости на верхнем пределе:
E = Uн – Iн × Rя,
E = 220 – 16 × 1,62 = 194,08 В;
Коэффициенты запаса

Значения коэффициентов для расчета трансформатора берем из таблицы:
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
Для мостовой:

Для определения действующего значения фазового напряжения вторичной обмотки трансформатора используем формулу Зимина Е.Н.:  (3.1)
(3.1)


| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
Определив , находим  , коэффициент трансформации, токи фаз:
, коэффициент трансформации, токи фаз:


(3.2)
 (3.3)
(3.3)

 (3.4)
(3.4)

 (3.5)
(3.5)

Определим типовую мощность трансформатора:
 (3.6)
(3.6)

На основании этих данных выбираем трансформатор /6/:
ТС – 6,3/0,7

Активное сопротивление трансформатора определим по формуле:

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |

Индуктивное сопротивление по формуле:
 (3.8)
(3.8)

Эквивалентное сопротивление по формуле:
 (3.9)
(3.9)

Где

Так как в режиме непрерывного тока  , то может быть определен угол
, то может быть определен угол  , соответствующий номинальному режиму:
, соответствующий номинальному режиму:
 (3.10)
(3.10)

3.2 Расчет дросселей
Исходные данн
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
Для мостовой однофазной схемы: 
Кратность гармоники: 
Круговая частота сети:
 (3.11)
(3.11)

Допустимое значение основной гармоники для компенсированных двигателей:


Число пар полюсов двигателя: 
В мостовой схеме значения гармонических составляющих выпрямленного напряжения  связаны с
связаны с  и
и  :
:
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
 (3.12)
(3.12)

Определяем необходимую индуктивность цепи выпрямленного тока:
 (3.13)
(3.13)

Индуктивность катодного дросселя:
 (3.14)
(3.14)
где  - индуктивность якоря электродвигателя
- индуктивность якоря электродвигателя
 (3.15)
(3.15)

Отсюда получим:

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
Д44-0,16-1,6.
3.3 Выбор тиристоров
Выбор тиристоров осуществляется по трем параметрам: по среднему току, протекающему через тиристор, по обратному напряжению на тиристоре, по току глухого короткого замыкания в нагрузке.
Среднее значение тока, протекающего через тиристор:
 (3.16)
(3.16)
где  - пусковой ток двигателя
- пусковой ток двигателя 
 - для однофазной схемы
- для однофазной схемы

Значение среднего тока, приведенного к классификационной схеме:
 (3.17)
(3.17)
где:  - коэффициент запаса по току;
- коэффициент запаса по току;
 - коэффициент, зависящий от схемы выпрямления, угла проводимости и от формы тока;
- коэффициент, зависящий от схемы выпрямления, угла проводимости и от формы тока;
 - коэффициент, учитывающий условия охлаждения.
- коэффициент, учитывающий условия охлаждения.

Найденный ток  должен быть меньше паспортного тока тиристора:
должен быть меньше паспортного тока тиристора:

Указываемое в п
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
 тиристора должно быть больше расчетного
тиристора должно быть больше расчетного
 (3.18)
(3.18)
где  - коэффициент запаса по напряжению, учитывающий возможность возникновения перенапряжений на тиристорах;
- коэффициент запаса по напряжению, учитывающий возможность возникновения перенапряжений на тиристорах;
 - линейное напряжение вторичной обмотки трансформатор,
- линейное напряжение вторичной обмотки трансформатор,
действующее значение. 

Амплитуда базового тока короткого замыкания
 (3.19)
(3.19)
где  - амплитуда фазового напряжения вторичной обмотки трансформатора при холостом ходе:
- амплитуда фазового напряжения вторичной обмотки трансформатора при холостом ходе:
 (3.20)
(3.20)

 - приведенные к вторичной стороне реактивное и активное сопротивления одной фазы трансформатора.
- приведенные к вторичной стороне реактивное и активное сопротивления одной фазы трансформатора.
 (3.21)
(3.21)
где  - номинальная мощность трансформатора
- номинальная мощность трансформатора
 (3.22)
(3.22)

Отсюда получим

Выбираем тиристор марки Т160
Предельный
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
Ударный ток при длительности 10 мс 3600;
Прямое падение напряжения не более 1,75 В.
3.4 Выбор защиты
При выборе автоматов необходимо выполнять условия:
 ,
, 
Минимальный ток расцепителя автоматов  потрепителей выбирают по расчетным рабочим токам и по условию
потрепителей выбирают по расчетным рабочим токам и по условию  . Выбор номинального, максимальных расцепителей определяет и номинальный ток автомата.
. Выбор номинального, максимальных расцепителей определяет и номинальный ток автомата.
Уставку на ток срабатывания в зоне КЗ автоматов выбираем по условию отстройки от ложных срабатываний при пуске электродвигателя. Определяем мощность потребляемую из сети.
 (3.27)
(3.27)
где  - КПД трансформатора
- КПД трансформатора

Определяем ток фазы, принимая для двигателя 
 (3.28)
(3.28)

Принимаем защиту о
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
 (3.29)
(3.29)

 (3.30)
(3.30)


Принимаем автоматический выключатель типа А3710Бс номинальным током расцепителя 
4 РАСЧЕТ И ПОСТРОЕНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
Для разомкнутой системы, в режиме непрерывного тока, электромеханическая характеристика может быть построена по формуле
 (4.1)
(4.1)
где 
 (4.2)
(4.2)

здесь:  - эквивалентное сопротивление, Ом;
- эквивалентное сопротивление, Ом;
 - сопротивление якорной цепи двигателя, Ом.
- сопротивление якорной цепи двигателя, Ом.

 (4.3)
(4.3)

Для замкнутой системы регулирования, если преобразователь имеет астатическую систему регулирования скорости, то в режиме непрерывного тока электромеханические характеристики представляются горизонтальными линиями – для заданного диапазона регулирования  .
.
 и
и  .
.
Однако так как преобразователь в режиме непрерывного тока не может обеспечить выпрямленное напряжение выше  , то при токе
, то при токе  ,
,
 (4.4)
(4.4)

Рабочую стати
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |

Определим  .
.
 (4.6)
(4.6)

Принимаем тахогенератор ТМГ-30
Для построения статических характеристик используем следующие формулы:
 (4.7)
(4.7)
 (4.8)
(4.8)











Рисунок 4.1 – Электромеханические характеристики двигателя постоянного тока 
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |

ЗАКЛЮЧЕНИЕ
Целью данной курсовой работы являлось разработка системы автоматического управления электроприводом постоянного тока на базе современной полупроводниковой техники. Поставленная цель была достигнута в результате выполнения и решения следующих задач. В ходе работы был рассчитан и выбран силовой трансформатор «ТС-6,3/0,7» , дроссель «Д44-0,16-1,6», тиристоры «Т160». В качестве защиты электропривода был выбран автоматический выключатель «А3710Б» на основе произведенных расчетов. Рассчитали и построили статические электромеханические характеристики электродвигателя постоянного тока.
Важной частью выполняемой курсовой работы являлось синтез системы, в ходе которого произвёлся расчет параметров регуляторов автоматизированного электропривода и выбор их элементов.
Следующей частью работы было построение переходного процесса. В ходе построения анализировалась система стабилизации скорости электропривода с обратной связью по току и скорости, с фильтром для уменьшения перерегулирования по скорости, с ограничением по току и с введением интегратора. В ходе анализа системы стало очевидно, что система стала менее устойчивой, переходный процесс увеличился по времени.
Заключительной фазой курсовой работы явилось разработка принципиальной схемы управления электроприводом.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ |
Список литературы
1. Бурянина, Н.С., Зенков Д.Ф., Методические указания к курсовой работе по дисциплине «Упрвление электроприводами» Новосибирск -1982, 66 с.
2. Лесных, А.С., Романов, М.Н., Системы управления электроприводами. Методические указания по курсовому проектированию. Новосибирск-2007, 54 с.
3. Бургин, Б.Ш., Управление электроприводами. Методические указания по курсовому проектированию. Новосибирск-1986, 48 с.
4. Китаенко, Г.И., Справочни
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 140604.СУЭП.КП.13.03.00 ПЗ П. П.1 .0 . 0 ПЗ |
5. Шило, В.С., Цифровые микросхемы 352 с.
6. Терехов, В.М.“Система управления электроприводов”, учебник, “Академия, М., 2005 г., с. 300.