Опис лабораторної установки
Лабораторна робота №3
Визначення моменту інерції і махового моменту електропривода методом вільного вибігу
Мета роботи: Визначити момент інерції і маховий момент електропривода. Набути практичних навичок в дослідному визначенні моменту інерції і махового моменту електроприводу, одержати експериментальне підтвердження теоретичним даним про динамічний момент в електроприводі.
Програма роботи
1. Ознайомитись з будовою лабораторної установки; записати паспортні дані електричних машин і дані вимірювальних приладів.
2. Зібрати схему по малюнку 1 і після перевірки її викладачем виконати дослід холостого ходу.
3. Зняти дані і побудувати криву вибігу п=f(t).
4. Використовуючи результат дослідів, визначити загальний момент інерції і маховиі момент електроприводу.
5. Скласти звіт і зробити висновки по лабораторній роботі.
Опис лабораторної установки
Лабораторна установка являє собою пристрій, що складається з двигуна М постійного струму паралельного збудження.
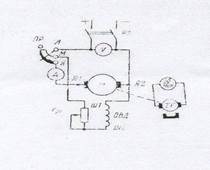
Цей електродвигун вмикається в мережу через рубильник P1 і пусковий реостат ПР. В схему ввімкнені вольтметр V для контролю за напр\гою мережі V=Vном і амперметр для вимірювання величини сили струму в колі якоря Iя. Добуток показів цих приладів визначає значення потужності (Вт), що споживається двигуном в колі якоря:Pa=Uном  Іа
Іа
Теоретичні дані
При постійній частоті обертання електроприводу потужність, що розвиває електродвигун, витрачається на подолання лише статичного навантаження. Якщо в ЕП настав перехідний режим і він працює із змінною частотою обертання, то потужність електродвигуна витрачається не тільки на статичне, але й на динамічне навантаження. Статичне навантаження зумовлене двома факторами: моментом статичного опору на валу робочого механізму і силами опору в передачах, що з'єднують вал електродвигуна з вихідним валом робочого механізму. Динамічне навантаження ЕП визначається динамічним моментом М1, зумовленим зміною швидкості руху всіх елементів системи ЕП.
Рівняння руху ЕП встановлює зв'язок між моментами, що діють на вал електродвигуна: моментом М2, що розвивається електродвигуном на валу, моментом статичного навантаження Мс і моментом динамічного навантаження Мj.
М2 =МС + Mj
Момент статичного навантаження, що відповідає встановленому режиму роботи EП (незмінній частоті обертанні), можна представити в вигляді суми моментів - момента статичного опору механізму Мст, зумовленого корисною роботою механізм (наприклад роботою по підйому вантажа), і моменту тертя МТр, зумовленого силами тертя в механізмі: Мс= Мст+ МТр.
Момент тертя можна врахувати введенням в останнє рівняння значень ККД робочого механізму  і ККД передавального пристрою (редуктора)
і ККД передавального пристрою (редуктора)  . В цьому випадку момент статичного опору механізму (Н.м.)
. В цьому випадку момент статичного опору механізму (Н.м.)

де  -ККД пристроїв, що приводяться в рух приводним електродвигуном, в частинах одиниці.
-ККД пристроїв, що приводяться в рух приводним електродвигуном, в частинах одиниці.
Динамічний момент Мj виникає під дією прискорень при змінах швидкості руху. Для ЕП з обертальним рухом динамічний момент (Н.м.)

де j - момент інерції обертального тіла відносно осі обертання. (кгм2);  -кутова швидкість цього тіла,(рад/с).
-кутова швидкість цього тіла,(рад/с).
Одержимо рівняння руху електропривода:

Приводний електродвигун з'єдна ється з робочим механізмом передавальним пристроєм, що змінює частоту обертання. Таким чином частіше за все є редуктор з ККД і
передавальним відношенням  ,де
,де  і
і  - кутові швидкості обертання валівелектродвигуна і робочого механізму відповідно.
- кутові швидкості обертання валівелектродвигуна і робочого механізму відповідно.
Для того, щоб запобігти трудомісткій задачі по розв'язанню декількох рівнянь руху для різних елементів ЕП з різними кутовими швидкостями руху, всі моменти опору і моменти інерції різних елементів, що утворюють систему ЕП, приводять до будь-якої однієї швидкості обертання руху - зазвичай до кутовї; швидкості обертання валу електродвигуна. Реальна система ЕП, елементи якої обертаються з різними кутовими швидкостями, замінюється спрощеною системою, у якої всі рухомі маси зосереджені на одному валу і обертаються з кутовою швидкістю  . В цьому випадку проведене значення статичного моменту опір механізму має вигляд
. В цьому випадку проведене значення статичного моменту опір механізму має вигляд

де  передавальне відношення редуктора. Загальний момент інерції системи ЕП визначається сумою моментів інерції: моменту інерції обертальних частин ЕП і розташованих на цього валу пристроїв (наприклад, З'єднувальної муфти) .Jд і приведеного до кутової швидкості вала електродвигуна моменту інерції J':
передавальне відношення редуктора. Загальний момент інерції системи ЕП визначається сумою моментів інерції: моменту інерції обертальних частин ЕП і розташованих на цього валу пристроїв (наприклад, З'єднувальної муфти) .Jд і приведеного до кутової швидкості вала електродвигуна моменту інерції J':

Приведений момент інерції визначається сумою приведених значень моментів інерції всіх елементів ЕП, що обертаються з кутовою швидкістю, що відрізняється від кутової швидкості обертання вала електродвигуна :

 де i1,i2…in- передавальне відношення на різних ступенях кутових швидкостей обертання. Мірою інерції обертальних тіл є також залежністю
де i1,i2…in- передавальне відношення на різних ступенях кутових швидкостей обертання. Мірою інерції обертальних тіл є також залежністю
GD2 =4gJ,
де G- сила тяжіння обертального тіла,Н; D- діаметр обертання, м; g=9,81 м/с - прискорення сили тяжіння.
В даній роботі розглядається один з методів експериментального визначення загального моменту інерції і загального махового моменту систему ЕП - метод вільного вибігу (самогальмування). Суть цього метода полягає в наступному. Досліджуваний агрегат, що включає в себе електродвигун і механічно з'єднані з ним елементи, розганяється до деякої встановленої частоти обертання в режимі XX nд0. Після цього електродвигун відключають від мережі і настає процес самочинного гальмування, тобто гальмування виключно за рахунок внутрішніх сил тертя. На подолання цих сил тертя витрачається кінетична енергія, яку мають обертальні частини агрегату:

З іншого боку ця енергія може визначатись як добуток потужності витраченої на приведення в обертання агрегата в режимі холостого ходу Роб.о на час t0:
А=Роб.о .t0
Прирівняємо вирази і одержимо вираз загального моменту інерції (кг м2)

Враховуємо, що 
Тоді 
Одержимо вираз, за допомогою якого визначимо маховий момент агрегата (Н.м2)

Значення Роб 0 іtQвизначають експериментально з досліду холостого ходу і досліду вільного
вибігу (побудова кривої вибігу п=f(t))
Хід роботи
1 Дослід холостого ходу
1 Електродвигун ввімкнутий в мережу при номінальній напрузі Uм= Uном.
2Регульованим реостатом Р встановити частоту обертання n= 1.2nдном
Після того, як частота обертання агрегату досягне встановленого значення, зняти покази приладів і занести в таблицю 1.
Таблиця 1
| Вимірювання | Обчислення | |||||
| Uном,В | Іа0,А | Nдо,об/хв | Р0,Вт | Реа,Вт | Ре.щ.,Вт | Роб.о,Вт |