Оценка точности измерительных приборов непосредственной оценки
Лекция 8. Мостовые схемы
Мостовые схемы широко используются в приборах для измерения параметров электрических цепей (R, С, М, L, f) и разнообразных неэлектрических величин, преобразуемых в параметры R, С, М, L, f.
Рассмотрим основные свойства мостовых схем на примере простейшей мостовой схемы, работающей на постоянном токе (рис. 4.3 а). Резисторы R1, R2, R3 и R4 образуют так называемые плечи моста. Один из них, например R1, является измеряемым сопротивлением (R1 = Rx). В диагональ ab моста включается измеритель (гальванометр) Г, сопротивление которого равно RГ. Источник питания напряжением U подключен ко второй диагонали, т.е. к точкам c и d.
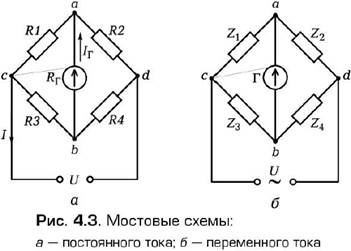
Условием равновесия моста, т.е. равенства нулю тока гальванометраIГ, является равенство
R1R4 = R2R3.
Откуда измеряемое сопротивление
Rx = R1 = R2(R3/R4).
Мостовые схемы работают как в неравновесном, так и в равновесном режимах.
В неравновесном режиме мост уравновешивается при начальном значении сопротивления R1 = Rx0 при изменении Rx, т.е. при Rx ≠ Rx0 мост выходит из равновесия, и в измерителе появляется ток IГ. Шкала измерителя градуируется непосредственно в единицах Rx. При этом ток IГ зависит не только от соотношения сопротивлений плеч моста, но и от значений питающего напряжения U или тока I, поэтому при колебаниях питающего напряжения U возникает дополнительная погрешность.
При работе в равновесном режиме мост уравновешивается при любом значении Rx путем изменения сопротивления любого из остальных плеч. В настоящее время широко применяются автоматические мосты, в которых процесс уравновешивания осуществляется устройством, следящим за возникновением неравновесия.
Чаще всего мостовые цепи на переменном токе применяются в равновесном режиме. На (рис. 4.3 б) представлена мостовая цепь переменного тока. На схеме a и b — точки моста; b и d — диагональ моста; Г — измеритель.
Положим, что все четыре плеча моста содержат как активные, так и реактивные сопротивления. Условие равновесия моста в этом случае будет выражаться равенством
Z1Z4 = Z2Z3.
где Z1, Z2, Z3 и Z4 — комплексы полных сопротивлений плеч моста.
Оценка точности измерительных приборов непосредственной оценки
Оценивать точность измерительного прибора, работающего по методу непосредственной оценки, абсолютной или относительной погрешностью измерения не представляется возможным. Предположим, например, что вследствие трения оси в опорах амперметра на 100A со шкалой в 100 делений возникает погрешность на одно деление, т.е. на 1A. Так как погрешность от трения относится к случайным погрешностям и ее величина и знак не зависят от отклонения подвижной части, то при измерении этим прибором тока, равного 90A, относительная погрешность измерения составит, %,
 100 = 1,1.
100 = 1,1.
Если этим прибором измеряется ток, равный 20A, то относительная погрешность, %,
 100 = 5.
100 = 5.
Таким образом, относительная погрешность измерения для данного прибора может иметь разное значение в зависимости от отклонения подвижной части. В связи с этим точность прибора оценивают так называемой приведенной погрешностью γп, под которой понимают отношение абсолютной погрешности прибора ∆Х к пределу измерения прибораXп:
γп =  .
.
В рассмотренном примере приведенная погрешность прибора на 100A составит, %,
 100 = 1.
100 = 1.
Отсюда необходимо сделать важный вывод о том, что любой прибор непосредственной оценки должен использоваться лишь при отсчете показаний в последней трети (лучше четверти) шкалы.
Итак, в случае работы в начале шкалы даже у лучшего прибора относительная погрешность измерения может быть не высокой.
С точки зрения оценки качества прибора в различных условиях его эксплуатации погрешности прибора делятся на две категории.
Основная погрешность, обусловленная несовершенством конструкции и изготовления прибора, определяется как приведенная погрешность, имеющая место при градуировке прибора, т.е. при так называемых нормальных условиях работы. Под нормальными условиями работы обычно понимают: температуру окружающей среды 20oC (или ту температуру, которая указана на шкале прибора); частоту 50Гц (или ту частоту, которая отмечена на шкале прибора); нормальное положение прибора, обозначенное определенным знаком на шкале; отсутствие внешних магнитных и электрических полей и т.д.
Погрешности, составляющие в сумме основную погрешность прибора, по своей природе являются случайными. К главной составляющей основной погрешности относится погрешность от трения.
В зависимости от допустимой основной (приведенной) погрешности приборы подразделяются на следующие классы: 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0. Каждый класс прибора характеризуется наибольшей допустимой основной погрешностью, величина которой равна номеру класса. Класс прибора обозначается на шкале соответствующей цифрой в кружке.
Дополнительные погрешности, вызванные отступлением от нормальных условий, т.е. от условий, имевших место при градуировке приборов, также зависят от параметров, совершенства конструкции и выполнения приборов. Дополнительные погрешности по своей природе, как правило, являются систематическими. Так, допустимая дополнительная погрешность (приведенная) от колебания окружающей температуры на каждые 10oC не должна превосходить по величине номера класса.
Влияние внешнего магнитного поля нормируется следующим образом: действие внешнего поля напряженностью 400А/м (5 эрстед) не должно вызывать изменение показаний прибора, превышающее ±(0,5...5,0)%, в зависимости от категории защищенности, т.е. от конструктивных мер защиты от влияния внешних полей.
Дополнительная погрешность от колебания частоты на ±10% от 50Гц, или от частоты, указанной на шкале, не должна превышать величины, соответствующей номеру класса.