Расчет быстроходной ступени 1 страница
Содержание
Задание на курсовой проект……………………………………………………...……2
Введение…………………………………………………………………………...……3
1. Предварительный расчет привода……………………………………………...…..4
1.1 Определение недостающих геометрических размеров
исполнительного механизма……………………….………………………..….4
1.2 Определение потребной мощности и выбор электродвигателя…………..….4
1.3 Составление таблицы исходных данных…………………………………..…..9
2Расчет быстроходной ступени…………………………………...…………………11
2.1 Выбор материала………………………………………………………………..11
2.2 Предварительные расчеты.......…………………………………………………11
2.3 Проектировочные расчеты..................................................................................14
2.4 Проверочные расчеты..........................................................................................17
2.5 Расчет усилий зубчатого зацепления..................................................................20
3 Расчет тихоходной ступени ......................................................................................21
3.1. Выбор материала.................................................................................................21
3.2 Предварительные расчеты.......…………………………………………………21
3.3 Проектировочные расчеты.................................................................................23
3.4 Проверочные расчеты.........................................................................................27
3.5 Расчет усилий зубчатого зацепления.................................................................30
4 Проверка подшипников…………………………………………..............…….......31
4.1. Быстроходный вал .............................................................................................31
4.2 Промежуточный вал...........................................................................................37
4.3 Тихоходный вал..................................................................................................41
5 Расчет валов...............................................................................................................47
5.1. Быстроходный вал .............................................................................................47
5.2 Промежуточный вал...........................................................................................52
5.3 Тихоходный вал..................................................................................................57
5.4 Расчет тихоходного вала на сопротивление усталости..................................61
6 Расчет шпонок............................................................................................................66
7 Проектирование корпуса редуктора.........................................................................68
8 Выбор муфт.................................................................................................................69
Заключение.....................................................................................................................70
Список литературы........................................................................................................71
Задание на курсовой проект по деталям машин
Шифр КП.2068998.15.Д1.6.4.1.00.00.000
Студенту Лукьянчик А.И. факультет ТНГ гр. РН-319
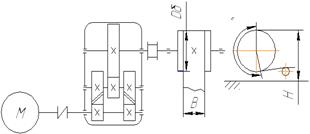
Спроектировать привод ленточного конвейера
Кинематическая схема График нагрузки
Срок службы – 5 лет, Кгод=0,8 , Ксут = 0,6
Исходные данные
1. Окружное усилие на барабане – Ft, кН 1,0
2. Скорость ленты конвейера – V, м/с 0,8
3. Диаметр барабана – Dб, мм 250
4. Ширина ленты – В, мм 300
5. Высота установки ведущего вала – Н, мм 250
6. Угол обхвата барабана – α, рад 3,4
Разработать
1. Сборочный чертеж редуктора
2. Сборочный чертеж привода
3. Рабочие чертежи деталей
Проект предоставить к защите 21.05.2012
Задание получил 31.01.2012 разработчикА.И.Лукьянчик
(подпись)
Руководитель разработки В.Е. Коновалов
ст. преподаватель (подпись)
Введение.
Проект – это комплекс технических документов, относящихся к изделию, предназначенному для изготовления или модернизации, и содержащий чертежи, расчеты, описание с принципиальными обоснованиями, макеты и пр.
Заданием на курсовой проект является конструирование привода ленточного конвейера, который, как и любая другая машина, включает в себя три основных узла: двигатель – передаточный механизм (редуктор) – исполнительный механизм(вал приводного барабана ленточного конвейера).
В данном проекте разработке подлежат второй узел механизма. В качестве двигателя используется стандартный электромотор.
Редуктор состоит из стального корпуса, в котором помещены элементы передачи. Входной вал посредством муфты соединяется с двигателем, выходной посредством цепной передачи с конвейером.
Исполнительным механизмом (ИМ) является приводной вал конвейера. Для ленточного конвейера - это вал приводного барабана.
1. Предварительный расчет привода.
1.1 Определение недостающих геометрических размеров
исполнительного механизма.
На этапе предварительного расчета определяем недостающие размеры (не указанные в исходных данных), необходимые для выполнения чертежа вала исполнительного механизма (ИМ).
Так как в качестве ИМ задан вал приводного барабана ленточного конвейера, то дополнительно определяем длину барабана (мм):
Вб = В + (50…100), (1.1)
где В – ширина ленты транспортера, мм (задана в исходных данных)
Вб=300+100=400 мм
1.2 Определение потребной мощности и выбор электродвигателя.
Расчетную мощность электродвигателя определяем по зависимости:
 (1.2)
(1.2)
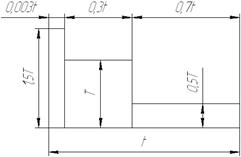
где ТЕ – постоянный вращающийся момент на валу ИМ, эквивалентный переменному моменту, заданному графиком нагрузки (рис.1), кНм;
ω- угловая скорость вращения вала ИМ конвейера, рад/с;
 — общий КПД привода.
— общий КПД привода.
Эквивалентный вращающийся момент рассчитываем следующим образом:
 (1.3)
(1.3)
где: Тi, ti — ступени нагрузки и соответствующее ей время работы по графику нагрузки (рис.1);
t— общее время под нагрузкой;
T— номинальный вращающий момент на ИМ, кНм.

Рис.1. График нагрузки.
Номинальный момент находим по формуле:
 (1.4)
(1.4)
где: Ft – окружное усилие на рабочем элементе ИМ, кН;
Dб – диаметр барабана, мм

Угловую скорость вращения вала ИМ определяем по формуле:
 (1.5)
(1.5)
где V- скорость тягового элемента конвейера, м/с.


Общий КПД привода находим как произведение КПД отдельных звеньев кинематической цепи:
 (1.6)
(1.6)
Выбираем из таблицы 1 коэффициенты полезного действия (КПД) отдельных звеньев кинематической цепи
Таблица 1
| Тип звена | Обозначение | КПД |
| Передача зубчатая: Цилиндрическая закрытая | 
| 0,97-0,99 |
| Муфта соединительная | 
| 0,98 |
| Подшипники качения (пара) | 
| 0,99 |

 кВт
кВт
Для однозначного выбора электродвигателя одной расчетной мощности недостаточно. Необходимо также знать расчетную частоту вращения вала электродвигателя или возможный диапазон ее изменения.

(1.7)

где:  ,
,  - соответственно максимальная и минимальная( для заданной кинематической схемы привода) расчетная частота вращения вала электродвигателя, об/мин;
- соответственно максимальная и минимальная( для заданной кинематической схемы привода) расчетная частота вращения вала электродвигателя, об/мин;
 - частота вращения вала ИМ, об/мин;
- частота вращения вала ИМ, об/мин;
 ,
,  - соответственно максимальное и минимальное общее передаточное отношение кинематической схемы привода.
- соответственно максимальное и минимальное общее передаточное отношение кинематической схемы привода.
 (1.8)
(1.8)
 об/мин
об/мин
Общее передаточное отношение привода определяется как произведение передаточных отношений отдельных ступеней передач, входящих в кинематическую схему:

(1.9)

Твердость зубьев << HRC 56
Так как редуктор стандартный, то максимальные и минимальные передаточные отношения быстроходной и тихоходной ступеней будут равны:
Таблица 2
| Тип передачи | Uрек | Uпред |
| Зубчатая цилиндрическая тихоходная ступень (во всех редукторах) | 2,5 - 5,0 | 6,3 |
| Зубчатая цилиндрическая быстроходная ступень в редукторах с развернутой схемой | 3,15 - 5,0 | 8,0 |


 об/мин
об/мин
 об/мин
об/мин
Из таблиц характеристик стандартных электродвигателей единой серии АИР выбираем электродвигатель по условиям
Рр < Ртаб
(1.10)
nЭmin < nтаб < nЭmax
где Ртаб, nтаб – табличные значения соответственно мощности, кВт и частоты вращения вала, об/мин,
Электродвигателей отвечающих условию (1.10) – три, выпишем основные их параметры:
Таблица 3
| № | Ртаб,кВт | двигатель | n, об/мин | ψn |
| 1,5 | 4А80B4УЗ | 2,0 | ||
| 4А90L6УЗ | 2,0 | |||
| 4А100L8УЗ | 1,7 |
Далее проводим проверку выбранного двигателя на перегрузку. Она преследует цель предотвратить «опрокидывание» при резком увеличении нагрузки. Проверку производим при возможных неблагоприятных условиях эксплуатации: напряжение падает на 10%, а нагрузка максимальна:
 (1.11)
(1.11)
где  - номинальная мощность двигателя по каталогу (таб.3), кВт;
- номинальная мощность двигателя по каталогу (таб.3), кВт;
Тmax – максимальный момент при эксплуатации ( по графику нагрузки), кНм;
nтаб – асинхронная частота вращения вала электродвигателя по каталогу (таб3), об/мин;
 - кратность пускового момента по каталогу (таб.3) на электродвигатель
- кратность пускового момента по каталогу (таб.3) на электродвигатель
U0 – общее передаточное отношение привода:
 (1.12)
(1.12)
Для первого электродвигателя (таб. 3):


1,5>0,966 – условие выполняется.
По рекомендациям П.Ф.Дунаева[5]:
 , Uб =
, Uб =  (1.13)
(1.13)
где  - передаточное отношение тихоходной ступени,
- передаточное отношение тихоходной ступени,
 передаточное отношение быстроходной ступени
передаточное отношение быстроходной ступени
 ,
,
Uб = 
Округляем по стандартному ряду.
Точность разбивки общего передаточного числа проверяем по следующему условию:
ΔU=  (1.14)
(1.14)
ΔU=  - условие выполняется.
- условие выполняется.
Для второго электродвигателя (таб. 3):


1,5>0,841 – условие выполняется.

Uб = 
Округляем по стандартному ряду.
ΔU= 
Для третьего электродвигателя (таб. 3):


1,5>0,989 – условие выполняется.

Uб = 
Округляем по стандартному ряду.
ΔU= 
Выбираем 1-й двигатель и вычерчиваем его эскиз с указанием его основных характеристик.
Исполнение IM1081

Таблица 4
| Тип двигателя | Число полюсов | d30 | L1 | L30 | d1 | b1 | h1 | L10 | L31 | d10 | b10 | h | h10 | h31 |
| 80B |
1.3 Составление таблицы исходных данных
Пронумеруем в исходных данных на кинематической схеме привода валы по порядку начиная с вала, связанного через муфту с валом электродвигателя. Затем производим расчет кинематических и силовых характеристик каждого вала. Этот расчет оформляем в виде таблицы исходных данных (таб.5)
При расчете мощности на каждом валу учитываем потери (КПД) на участке кинематической цепи от электродвигателя до рассматриваемого вала (Р1) и от предыдущего вала до рассматриваемого (Р2, Р3,…). При расчете Р1 за мощность электродвигателя примем номинальную расчетную мощность полученную по формуле:
 (1.15)
(1.15)
Ррн= 
Таблица исходных данных
Таблица 5
| № валов | ni, об/мин | Рi, кВт | Тi, Нм |
| n1=nтаб=1415 | 

| 

| |

| 

| 

| |

| 

| 

| |
| n4=n3=62,888 | 

| 

|
Проверим выполнение следующих двух примерных равенств: n4  им, Т4
им, Т4 
62,888 
121,487 
Проверим выполнение условий (1.16), (1.17)
ΔТ=  (1.16)
(1.16)
ΔТ= 
Δn=  (1.17)
(1.17)
Δn= 
Расчет быстроходной ступени
2.1 Выбор материала.
Выбор материала для зубчатых колес обуславливается необходимостью обеспечения достаточной изгибной и контактной прочности зубьев, характером производства, требованием к габаритам передачи и др.
Основными материалами для зубчатых колес являются термически обрабатываемые стали.
Для колеса и шестерни выбрана Сталь 40Х в комбинации II (ТВЧ+У), твердость сердцевины HB=269…302, примем HB=290, поверхности HRC=45…50, примем HRC=47.
2.2 Предварительные расчеты.
Допускаемые контактные напряжения σнр определяем раздельно для шестерни и колеса по формуле:
 (2.1)
(2.1)
 , выбирается для шестерни и колеса в зависимости от способа термической обработки, средней твердости поверхности зубьев и стали (по таб. 3[8])
, выбирается для шестерни и колеса в зависимости от способа термической обработки, средней твердости поверхности зубьев и стали (по таб. 3[8])
Шестерня:  МПа
МПа
Колесо:  МПа
МПа
Коэффициент запаса прочности для шестерни и колеса:
SH1=1,2
SH2=1,1
Nнlim – базовое число циклов напряжений, соответствующее пределу выносливости:
 =30
=30  (2.2)
(2.2)


Nк=Nкc1=60nLn1 – число циклов напряжений в соответствии с заданным сроком службы.
Ln1 =5  - ресурс передачи, ч (2.3)
- ресурс передачи, ч (2.3)
Ln1 =5  ч
ч
Частота первого(быстроходного) вала из (таб.5) - n1=1415, об/мин
Nк1=Nкc1=60 
Nк2 =Nкc2=60 
При нагрузке на передачу, изменяющейся по ступенчатой циклограмме (рис.1),
Nк=NНЕ
 (2.4)
(2.4)


Nc11=0,003 
Nc12=0,3 
Nкc1>  0,849 – коэффициент долговечности.
0,849 – коэффициент долговечности.
Nкc2>  0,874
0,874
ZR- коэффициент, учитывающий шероховатость сопряженных поверхностей зубьев. Значение ZR, общее для шестерни и колеса, принимаем в зависимости от параметра шероховатости более грубой поверхности пары шестерня-колесо.
ZR1,2=1
ZV- коэффициент, учитывающий окружную скорость.
ZV1,2=0,95
 МПа
МПа

 МПа
МПа
 МПа
МПа
522,94<1,25 
522,94<613,3
Допускаемые напряжения изгиба зубьев  определяют раздельно для шестерни и колеса по формуле:
определяют раздельно для шестерни и колеса по формуле:
 (2.5)
(2.5)

 установлен для отнулевого цикла напряжений и определяется в зависимости от способа термической или химико-термической обработки.
установлен для отнулевого цикла напряжений и определяется в зависимости от способа термической или химико-термической обработки.


SF1,2=1,7
YZ=1- коэффициент, учитывающий способ получения заготовки зубчатого колеса.
YА=1 – коэффициент, учитывающий влияние двустороннего приложения нагрузки
YX=1- коэффициент, учитывающий диаметр зубчатого колеса, мм
YN – коэффициент долговечности
 qF=6 (2.6)
qF=6 (2.6)
NFlim - базовое число циклов напряжений,