УПРАВЛЕНИЕ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ С ПОМОЩЬЮ МИКРОПРОЦЕССОРНІХ СИСТЕМ
Расширение сферы применения вычислительной техники связано с быстрым снижением стоимости микроЭВМ и микропроцессоров. В настоящее время их применение экономически целесообразно не только на крупных предприятиях, но и в средних и мелких цехах.
Например, в литейных цехах микропроцессорные системы могут применяться в смесеприготовительном отделении для управления автоматическими формовочными линиями и отдельными, формовочными и стержневыми автоматами, для управления заливкой литейных форм и финишной обработкой отливок, а также в отделениях литья под давлением и по выплавляемым моделям.
В смесеприготовительном отделении микропроцессорные системы используют для управления операциями контроля качества свежих формовочных материалов, транспортировки компонентов формовочной смеси к месту ее приготовления, регенерации отработанных формовочных смесей и контроля их качества, приготовления формовочных и стержневых композиций.
Работой автоматической формовочной линии управляет микроЭВМ, которая, как правило,
 связана с микропроцессорными системами управления отдельными операциями формообразования, а также с компьютерами, управляющими технологическими процессами в смесеприготовительном и плавильном отделениях. Следовательно, кроме управления работой непосредственно автоматической формовочной линией, с помощью микроЭВМ осуществляется координация подачи жидкого металла, контроль циркуляции материалов и технологической оснастки, регистрация простоев и потерь рабочего времени, диагностирование работоспособности оборудования. Такого рода автоматическая формовочная линия, оснащенная системой управления на базе микроЭВМ, выпускается как у нас в стране, так и за рубежом и успешно работает в литейных цехах.
связана с микропроцессорными системами управления отдельными операциями формообразования, а также с компьютерами, управляющими технологическими процессами в смесеприготовительном и плавильном отделениях. Следовательно, кроме управления работой непосредственно автоматической формовочной линией, с помощью микроЭВМ осуществляется координация подачи жидкого металла, контроль циркуляции материалов и технологической оснастки, регистрация простоев и потерь рабочего времени, диагностирование работоспособности оборудования. Такого рода автоматическая формовочная линия, оснащенная системой управления на базе микроЭВМ, выпускается как у нас в стране, так и за рубежом и успешно работает в литейных цехах.
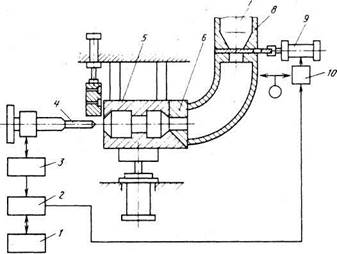
| Рис. 159. Схема стержневого автомата с управляющим микропроцессором |
Выпускаются отдельные формовочные и стержневые автоматы с системами микропроцессорного управления. На рис. 159 приведена схема автомата для изготовления стержней из песчано-глинистых смесей пескодувом с дополнительной допрессовкой.
Микропроцессорное исполнение системы управления позволяет легко подключать ее к управляющей микроЭВМ 1 для объединения с автоматической формовочной линией. В автомате запрограммировано выполнение следующих операций: сборка стержневого ящика 5; дозировка стержневой смеси из бункера 8 в пескодувную головку 6\ наддув стержня; дополнительная допрессовка стержня штырем 4 и разборка стержневого ящика. Дозировка стержневой смеси в помощью шибера с гидроцилиндром 9, давление наддува и глубина внедрения штыря автоматически рассчитывается и регулируется микропроцессором 2 на основе данных, полученных от датчиков 3 и 10,
В термических цехах микропроцессорные системы могут применяться в системах регулирования температуры в рабочем пространстве печей, для управления операциями загрузки и выгрузки печей, а также для управления и контроля в установках для приготовления контролируемых (защитных) атмосфер.
В качестве примера рассмотрим структурную схему регулирования температуры методической газовой печи при отжиге слитков (рис. 160). Печь / имеет несколько тепловых зон. Информация о температуре рабочего пространства печи в каждой зоне, соотношении газ—воздух и температуре поверхности слитков поступает в микроЭВМ 2,. которая на основе методов динамического программирования вырабатывает управляющие воздействия в виде задания локальным системам регулирования температурного режима зон. Система слежения за прохождением слитков обеспечивает соответствующие изменения режима нагрева в зонах.
В настоящее время широкое применение в системах управления программными роботами находят микропроцессоры и микроЭВМ. Использование ЭВМ позволяет выполнить робототехническую систему более гибкой и легко переналаживаемой, придать ей дополнительные возможности общения в диалоговом режиме оператора с роботом. На включенную в состав робототехнической системы ЭВМ возлагаются различные функции. Если на этапе обучения ЭВМ осуществляет связь с оператором, формирует и редактирует программу движения, то на этапе эксплуатации она проводит вычисления и формирует управляющие сигналы на исполнительные механизмы.Структурная схема простейшей робототехнической системы с использованием микроЭВМ показана на рис. 161. При ее эксплуатации оператор с помощью задающего устройства 1 формирует программу движения исполнительного механизма 3 и приводит ее в память микроЭВМ. При необходимости программа через систему управления 2 выдается на исполнительные механизмы.
В качестве задающего устройства может быть использован обычный дисплей или функциональный пульт, который должен Обеспечить оператора всеми необходимыми средствами по обучению и управлению роботом. Включение микроЭВМ в систему управления 2 роботом может осуществляться различными способами. При первом способе микроЭВМ используется как программное устройство, которое формирует управляющие сигналы на исполнительные механизмы без получения информации об их состояниях.
Второй способ базируется на замкнутой схеме. МикроЭВМ непрерывно получает информацию о траектории движения манипулятора управляемого робота. Полученная информация используется микроЭВМ для корректировки траектории движения. При третьем способе микроЭВМ непосредственно включается в контур следящей системы привода исполнительного механизма, т. е. главная обратная связь запоминается через микроЭВМ, которая выполняет активную коррекцию привода. При использовании, четвертого способа для разгрузки управляющей микроЭВМ часть задач исполнительного уровня возлагается на дополнительный микропроцессор, включенный в состав привода.


|

.
Основными
преимуществами микропроцессорного управления являются его гибкость и универсальность, так как программа коррекции привода размещается в перепрограммируемом запоминающем устройстве микропроцессора и легко может быть изменена.
Системы управления на базе микропроцессоров и микроЭВМ позволяют в значительной степени устранить недостатки обычных роботов и использовать их для решения различных технологических задач, например для непосредственного управления технологическим и транспортным оборудованием.
Контрольные вопросы
1. Расскажите о классификации управляющих микроЭВМ.
2. Каков принцип действия программаторов?
3. Расскажите о принципе действия контроллеров.
4. Где могут использоваться микропроцессорные системы в литейных цехах?
5. Как работает система управления стержневым автоматом с микроЭВМ?
6. Как осуществляется управление роботами с помощью микропроцессоров
и микроЭВМ?