Порядок решения задачи расхождения с одним судном
АЗОВСЬКИЙ МОРСЬКИЙ ІНСТИТУТ
НАЦІОНАЛЬНОГО УНІВЕРСИТЕТУ «ОДЕСЬКА МОРСЬКА АКАДЕМІЯ»
Кафедра Навігації і управління судном
Методичні вказівки та завдання
На виконання розрахунково-графічної
Роботи з дисциплін
“Міжнародні правила запобігання зіткнення суден у морі та використання РЛС та ЗАРП при розходженні суден”
Напрям підготовки 6.070104 «Морьский та річковий транспорт»
Спеціалізація _СВ_
для студентів 2-го курсу денної, 5-го курсу заочної та 3-го курсу ускоренної форми навчання.
Маріуполь 2016
Каждый студент 2-го курса дневной формы обучения согласно своего варианта выполняет 3 задачи на бланках маневренного планшета и отвечает на 2 вопроса на отдельном листе. Бланки маневренных планшетов с решенными задачами и лист с ответами подшиваются в отдельную папку.
Вариант контрольной работы выбирается по последней цифре личного шифра.
| Вариант | №№ задач | №№ вопросов |
| 1, 11, 21 | 1, 11 | |
| 2, 12, 22 | 2, 12 | |
| 3, 13, 23 | 3, 13 | |
| 4, 14, 24 | 4, 14 | |
| 5, 15, 25 | 5, 15 | |
| 6, 16, 26 | 6, 16 | |
| 7, 17, 27 | 7, 17 | |
| 8, 18, 28 | 8,18 | |
| 9, 19, 29 | 9, 19 | |
| 10, 20, 30 | 10, 20 |
Каждый студент 5-го курса заочной и 3-го ускоренного курса формы обучения согласно своего варианта выполняет 5 задачи на бланках маневренного планшета и отвечает на 2 вопроса на отдельном листе. Бланки маневренных планшетов с решенными задачами и лист с ответами подшиваются в отдельную папку.
Вариант контрольной работы выбирается по последней цифре личного шифра.
| Вариант | №№ задач | №№ вопросов |
| 1, 11, 21, 31, 41 | 1, 11 | |
| 2, 12, 22, 32, 42 | 2, 12 | |
| 3, 13, 23, 33, 43 | 3, 13 | |
| 4, 14, 24, 34, 44 | 4, 14 | |
| 5, 15, 25, 35, 45 | 5, 15 | |
| 6, 16, 26, 36, 46 | 6, 16 | |
| 7, 17, 27, 37, 47 | 7, 17 | |
| 8, 18, 28, 38, 48 | 8,18 | |
| 9, 19, 29, 39, 49 | 9, 19 | |
| 10, 20, 30, 40, 50 | 10, 20 |
Для грамотного выполнения контрольной работы необходимо изучить Правила №№ 5, 6, 7, 8, 9, 10 МППСС-72, а также краткие методические указания по графическому решению задач на маневренном планшете.
На титульном листе папки контрольной работы указать фамилию, имя, отчество студента, номер личного шифра, наименование дисциплины, курс, номер варианта, специальность.
Выполненная работа в установленный срок передается для проверки преподавателю.
К зачету допускается студент, который выполнил РГР и лабораторные работы.
Краткие методические указания по графическому решению задач на маневренном планшете.
Порядок решения задачи расхождения с одним судном
на маневренном планшете
(см. Приложения 1, 2)
Условия ограниченной видимости являются особыми условиями плавания, поэтому дисциплины «Радиолокационный тренажер» и «Тренажер САРП» предполагают прежде всего плавание в этих условиях.
При плавании при ограниченной видимости в открытом море обзор окружающей обстановки с помощью РЛС производится преимущественно на шкалах масштаба 12-16 миль, а эта дистанция является вероятной дальностью обнаружения большинства судов.
Хорошая морская практика для решения задачи расхождения с судами в открытом море рекомендует разделить экран РЛС на три зоны:
1)  зона оценки ситуации от 12 до 8 миль, где определяются степень опасности столкновения, пара-метры движения встречных судов и проигрывается маневр расхождения;
зона оценки ситуации от 12 до 8 миль, где определяются степень опасности столкновения, пара-метры движения встречных судов и проигрывается маневр расхождения;
2) зона маневрирования от 8 до 4 миль. Действия для расхождения рекомендуется принимать как можно скорее после установления опасности столкновения;
3) зона чрезмерного сближения от 4-х миль. До входа эхо-сигнала судна в эту зону маневр расхождения в открытом море должен быть завершен, чтобы при изменении ситуации в результате неверных маневров судов имелось время и пространство для устранения опасности столкновения.
При плавании в условиях ограниченной видимости привилегированных судов нет и на каждое судно с РЛС возлагается обязанность по предупреждению столкновения, причем рекомендуется соблюдать следующий приоритет маневров:
1. поворот вправо;
2. уменьшение скорости;
3. остановка судна;
4. поворот влево.
Основным допущением при решении задачи расхождения на маневренном планшете (ситуационном планшете) и с использованием САРП является неизменность параметров движения (курсов и скоростей) собственного судна и других судов на период набора информации и решения задачи.
Момент начала решения задачи – момент начала расхождения, «нулевая точка» это время снятия первого отсчета пеленга и дистанции до первой цели.
Время возвращения к первоначальным параметрам движения собственного судна это момент окончания расхождения.
При включении РЛС необходимо произвести правильную регулировку яркости и усиления приемника, а в случае необходимости уменьшить влияния помех от волнения и атмосферных осадков.
Порядок решения задачи расхождения на маневренном планшете:
1) Из центра планшета провести вектор перемещения собственного судна за 6 минут, Vн.
2) Сделать записи в таблице обработки радиолокационной информации о курсе (Кн) и скорости (Vн) собственного судна.
3) Из центра планшета радиусом Дзад. провести окружность. Рекомендуется при ограниченной видимости принимать в условиях открытого моря Дзад. = 1,5 ÷ 2 мили, а в стесненных водах Дзад. = 0,5 мили.
4) Наблюдая за ситуацией на экране РЛС выбрать по изменению относительных полярных координат (П 0 и Д < 0) эхо сигнал опасного судна.
5) С экрана РЛС снять отсчеты пеленга и расстояния эхо-сигнала опасного судна, запустить секундомер, заметить судовое время, сделать записи в таблицу обработки радиолокационной информации для нулевой точки о времени 0, пеленге и дистанции для судна А.
6) По этим данным нанести на маневренный планшет начальную ситуацию, обозначив нулевую точку цифрой 0 и большой буквой А.
7) Используя параллельную линейку направить (воткнуть) вектор перемещения собственного судна за 6 минут Vн в нулевую точку и его начало обозначить буквой F (Fixed), вектор обозначить буквой Vн.
8) Провести часть окружности в районе нулевой точки, вправо и влево от нее (или окружность) радиусом Vн из центра F, что позволит ускорить графическое решение задачи.
9) На 6-й минуте снять отсчеты пеленга и расстояния эхо-сигнала того же судна А и записать их в таблицу обработки радиолокационной информации.
10) По полученным данным нанести на маневренный планшет 6-ти минутную точку, обозначив ее цифрой 6.
11) Соединить нулевую и 6-ти минутную точки прямой для определения вектора относительного перемещения цели за 6 минут. Стрелка вектора направлена в 6-ти минутную точку. Обозначим этот вектор Vо.
12) Продлить вектор Vо до центра планшета, получим ЛОДА – траекторию, по которой будет перемещаться эхо-сигнал судна А при неизменности курсов и скоростей собственного и встречного судов.
13) Из центра планшета на ЛОДА опустить перпендикуляр и снять значение Дкр .
14) Определить графическим вектором Vо от нулевой точки до основания перпендикуляра линии Дкр время кратчайшего сближения судов tкр.
15) Полученные значения Дкр и tкр записать на маневренном планшете.
16) Соединить точку F с 6-ти минутной точкой прямой, получим 6-ти минутный вектор цели Vц, направленный в 6-ти минутную точку, обозначить его Vц.
17) Используя параллельную линейку и измеритель определить истинные курс и скорость судна-цели А, сделать записи на маневренном планшете;
18) Нанести упрежденную точку (рекомендуется 12-ти минутную с учетом времени набора информации (tн.и. = 6 мин., решения задачи tр.з. = 3 мин. и выполнения маневра tм = 3 мин) и провести из нее пунктирными линиями касательные к окружности радиуса Дзад. Получим ОЛОДы, по которым должны перемещаться эхо-сигналы судна при выполнении маневра. При отвороте вправо ОЛОД пройдет слева от судна и наоборот.
19) Из 6-ти минутной точки провести линии параллельные ОЛОДам в противоположном направлении для определения сектора опасных курсов (СОК), за пределы которого нужно вывести конец вектора Vн для решения задачи расхождения. Если точка F находится в пределах СОК, решить задачу расхождения уменьшением скорости невозможно.
20) Выбрать эффективный маневр расхождения на безопасном расстоянии, причем изменение курса и/или скорости должно быть достаточно большим, чтобы оно было замечено встречным судном. Маневр отворота, в общем случае вправо, должен быть не менее чем на угол 30-45º, а уменьшение скорости должно быть не менее, чем на половину.
Комбинированный маневр изменением курса и скорости на практике применяется редко из-за ухудшения управляемости судна при снижении скорости.
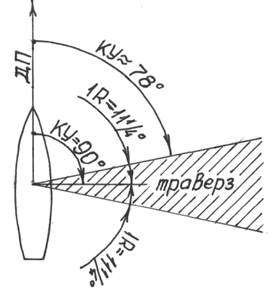
Согласно требованиям Правила 19 МППСС-72 «… насколько это возможно следует избегать:
- изменения курса влево, если другое судно находится впереди траверза и не является обгоняемым;
- изменения курса в сторону судна, находящегося на траверзе или позади траверза»;
- а также следует принимать во внимание ограничения РЛС, из-за которых эхо-сигнал судна слева может на экране не наблюдаться. Комментарии Правило под термином «траверз» подразумевают угол между направлениями 1 румб впереди и 1 румб позади навигационного траверза.
Если справа на траверзе или позади его находится эхо-сигнал судна, то
необходимо сначала уменьшить скорость не менее, чем на половину и когда судно пройдет вперед за пределы траверза, т.е. будет находиться на КУ 78 ¾º пр/б, следует отвернуть вправо и увеличить скорость до первоначально выбранной безопасной, если необходимо расходиться со встречными судами, находящимися впереди траверза.
21) Исходя из вышеизложенного, при выборе маневра отворота вправо соединить точку F с точкой пересечения дуги, проведенной радиусом Vн и соответствующей стороны угла СОК. Получим 6-ти минутный вектор нашего судна Vн после маневра изменения курса.
22) При выборе маневра уменьшения скорости определить величину 6-ти минутного вектора Vн, который является отрезком вектора Vн между точкой F и соответствующей стороной угла СОК.
6-ти минутный вектор относительной скорости Vо направлен из конца вектора Vн в 6-ти минутную точку.
23) При выполнении комбинированного маневра курс и скорость нашего судна определяются вектором Vн между точкой F и соответствующей стороной угла СОК.
24) Сделать записи о Кн и Vн в таблице обработки радиолокационной информации на 12-ю минуту.
25) Определить точку возвращения к первоначальным параметрам движения нашего судна, для чего провести линию, параллельную ЛОД касательно к окружности Дзад. Точка пересечения этой линии с ОЛОД является точкой возвращения к первоначальным параметрам движения.
26) Определить время возвращения к первоначальным параметрам движения измерив расстояние между 12-ти минутной точкой и точкой возвращения величиной вектора относительной скорости Vо при изменении курса или величиной вектора Vо при уменьшении скорости.
Снять значения пеленга и расстояния до встречного судна в момент его возвращения к первоначальным параметрам движения и сделать запись на маневренном планшете.
Следует помнить, что упрежденная точка и точка возвращения к первоначальным параметрам являются приближенными с запасом в безопасную сторону, т.е. в упрежденной точке наше судно должно закончить маневрирование для расхождения, а в точке возвращения начать маневр возвращения к первоначальным параметрам.
Поэтому за процессом расхождения необходимо вести контроль, нанося на планшет через 3-6 мин. по пеленгу и дистанции позиции встречного судна.
Фактически, момент возвращения определяют по развитию ситуации с учетом действий встречного судна.
27) Определить графически расстояние отхода от линии первоначального курса – Sотх. при его изменении и сравнить его с допустимым по условиям плавания, для чего опустить перпендикуляр из конца вектора Vн на Vн и получить скорость отхода – Vотх.. По значению Vотх. и времени следования новым курсом tвоз. – tупр. на логарифмической шкале планшета определить Sотх.
Аналитически приближенно Sотх. можно определить по формулам:
- при маневрировании курсом Sотх. = Vн (tвоз. - tупр.) · sin К;
- при комбинированном маневре Sот. = 0,5 (Vн + Vн') (tвоз. - tупр.) · sin К,
где К – угол отворота.
28) При решении задачи расхождения сделано допущение о неизменности курса и скорости встречного судна, а так как последнее тоже может маневрировать, необходимо тщательно следить за процессом расхождения для определения изменения параметров движения встречного судна по изменению расстояния кратчайшего сближения Дкр. В случае неблагоприятного маневра встречного судна, в результате которого Дкр уменьшилось, необходим повторный набор информации для решения нового векторного треугольника с измененными курсами и скоростями собственного и встречного судов.
 Порядок решения задачи расхождения с несколькими судами
Порядок решения задачи расхождения с несколькими судами
на маневренном планшете
(см. Приложение 3)
Если на экране РЛС наблюдаются эхо-сигналы нескольких опасных судов, то для наблюдения и решения задачи на маневренном планшете рекомендуется выбрать не более трех.
Очередность выполнения измерений пеленгов и дистанций до эхо-сигналов целей нужно производить в одной и той же последовательности через установленный промежуток времени.
Для решения задачи расхождения с несколькими судами необходимо выполнить пункты 1÷19, перечисленные в порядке решения задачи расхождения с одним судном.
Среди опасных или потенциально опасных судов необходимо определить лимитирующее судно, по которому определим единый маневр расхождения для всех судов.
Проведя из упрежденной точки этой цели ОЛОД, построим новый векторный треугольник перемещений и определим новый курс (или скорость) для расхождения.
Новый вектор нашего судна, определенный по лимитирующему судну, проведем из точек F для остальных судов и построим для них новые векторные треугольники перемещения. Параллельно векторам относительной скорости Vо или Vо проведем из упрежденных точек ОЛОДЫ для этих судов.
Время возвращения к первоначальным параметрам движения определяется по лимитирующему судну (см. пункт 26 Порядка решения задачи расхождения с одним судном на маневренном планшете).
Если на траверзе или позади траверза на экране РЛС имеется отметка эхо-сигнала судна и отворот вправо не рекомендуется, необходимо сначала уменьшить скорость не менее чем на половину, а затем, пропустив это судно вперед, отворачивают вправо с увеличением скорости до первоначальной.
Задачи
I Следуя курсом Кн со скоростью Vн обнаружили эхо-сигнал судна и измерили пеленги и расстояния до него в фиксированные моменты времени Тс1, Тс2.
Определить Дкр, tкр, Кц, Vц, курс Кн, на который нужно лечь в упрежденной точке на 12-й минуте после момента начала наблюдений для расхождения с целью на расстоянии не меньше Дз и судовое время возврата на первоначальный курс, а также расстояние отхода Sотх. от первоначального курса.
| № задачи | Кн | Vн, уз. | Тс, ч.мин | П, º | Д, мили | Дз, мили |
| 1/11 | 17,0 | 04.00 04.06 | 8,0 6,1 | 2,0 | ||
| 2/12 | 12,0 | 21.14 21.20 | 10,0 8,2 | 2,0 | ||
| 3/13 | 14,0 | 12.26 12.32 | 8,5 6,1 | 2,0 | ||
| 4/14 | 14,0 | 08.50 08.56 | 8,0 6,2 | 2,0 | ||
| 5/15 | 18,0 | 18.30 18.36 | 8,0 5,5 | 1,5 | ||
| 6/16 | 18,0 | 02.35 02.41 | 8,5 6,5 | 2,0 | ||
| 7/17 | 15,0 | 23.18 23.24 | 8,0 6,3 | 2,0 | ||
| 8/18 | 24,0 | 09.35 09.41 | 10,9 8,3 | 2,0 | ||
| 9/19 | 15,0 | 05.30 05.36 | 8,1 6,0 | 1,5 | ||
| 10/20 | 18,0 | 20.15 20.21 | 98,5 | 9,1 6,9 | 2,0 |
II Используя условия задач №№ 1÷10 и пронумеровав их №№ 11÷20, разойтись с опасным судном маневром уменьшения скорости. Определить скорость, которую нужно иметь в упрежденной точке на 12-й минуте после момента начала наблюдений Vн и определить судовое время увеличения скорости судна до первоначальной.
III Следуя курсом Кн со скоростью Vн обнаружили на экране РЛС эхо-сигналы целей А и В и измерили пеленги и расстояния до них в фиксированные моменты времени Тс1 и Тс2.
Определить Дкр, tкр, Дпер., tпер., Кц, Vц .
Руководствуясь МППСС-72 предпринять в упрежденной точке на 12-й минуте после момента начала наблюдений эффективный маневр расхождения с судами на расстоянии не менее Дз.
Определить курс расхождения Кн или скорость расхождения Vн и судовое время возврата к первоначальным параметрам Кн / Vн, а также расстояние отхода Sотх. от первоначального курса в случае маневра курсом.
| № задачи | Кн, º | Vн, уз. | Тс, ч.мин | Дз | А | В | ||
| П, º | Д, мили | П, º | Д, мили | |||||
| 13,0 | 14.02 14.08 | 1,5 | 8,0 6,0 | 9,0 6,8 | ||||
| 15,0 | 17.10 17.16 | 2,0 | 8,5 6,3 | 9,0 6,5 | ||||
| 12,0 | 20.30 20.36 | 2,0 | 8,3 5,7 | 3,9 3,2 | ||||
| 15,0 | 03.45 03.51 | 2,0 | 9,5 7,2 | 8,5 7,0 | ||||
| 15,0 | 02.19 02.25 | 1,5 | 9,0 7,0 | 1,7 1,7 | ||||
| 14,0 | 08.20 08.26 | 2,0 | 9,5 6,9 | 2,7 3,4 | ||||
| 17,0 | 14.44 14.50 | 2,0 | 9,9 7,0 | 4,5 4,1 | ||||
| 15,0 | 06.00 06.06 | 2,0 | 7,0 6,0 | 9,0 7,0 | ||||
| 17,0 | 15.03 15.09 | 2,0 | 7,5 5,8 | 6,8 5,8 | ||||
| 16,0 | 23.15 23.21 | 1,5 | 7,5 5,8 | 292,5 | 8,2 6,8 |
IV Следуя курсом Кн со скоростью Vн обнаружили на экране РЛС эхо-сигналы целей А, В, С и измерили пеленги и расстояния до них в фиксированные моменты времени Тс1 и Тс2.
Определить Дкр, tкр, Дпер., tпер., Кц, Vц .
Руководствуясь МППСС-72 предпринять в упрежденной точке на 12-й минуте после момента начала наблюдений эффективный маневр расхождения с судами на расстоянии не менее Дз.
Определить курс расхождения Кн или скорость расхождения Vн и судовое время возврата к первоначальным параметрам Кн / Vн, а также расстояние отхода Sотх. от первоначального курса в случае маневра курсом.
| № задачи | Кн, º | Vн, уз. | Тс, ч.мин | Дз | А | В | С | |||
| П, º | Д, мили | П, º | Д, мили | П, º | Д, мили | |||||
| 14,0 | 02.15 02.21 | 2,0 | 11,0 8,5 | 9,0 7,4 | 8,5 6,6 | |||||
| 14,0 | 03.17 03.23 | 2,0 | 9,5 7,0 | 342,5 | 7,0 5,8 | 3,0 3,0 | ||||
| 21,0 | 04.44 04.50 | 2,0 | 2,3 2,3 | 7,2 6,2 | 162,5 | 9,0 6,8 | ||||
| 15,0 | 05.18 05.24 | 2,0 | 9,5 6,3 | 7,0 5,2 | 216,5 | 7,0 5,5 | ||||
| 21,0 | 06.45 06.51 | 2,0 | 7,0 5,7 | 7,0 6,0 | 4,5 3,6 | |||||
| 21,0 | 07.14 07.20 | 2,0 | 8,5 6,2 | 9,5 7,1 | 10,0 7,7 | |||||
| 21,0 | 08.32 08.38 | 2,0 | 79,5 | 11,0 8,5 | 9,5 7,9 | 98,5 | 10,5 7,6 | |||
| 15,0 | 09.35 09.41 | 2,0 | 8,5 7,1 | 2,3 2,3 | 6,0 4,8 | |||||
| 16,0 | 10.22 10.28 | 1,0 | 5,5 3,8 | 5,6 3,5 | 7,0 4,7 | |||||
| 13,0 | 17.24 17.30 | 1,5 | 6,7 4,7 | 7,0 5,7 | 3,0 2,5 |
V Следуя курсом Кн со скоростью Vн обнаружили на экране РЛС эхо-сигналы целей А, В, С и измерили пеленги и расстояния до них в фиксированные моменты времени Тс1 и Тс2.
Определить Дкр, tкр, Дпер., tпер., Кц, Vц .
Руководствуясь МППСС-72 предпринять эффективный маневр для расхождения с судами в два этапа: уменьшением скорости, а затем, пропустив судно, находящееся справа на траверзе или позади траверза, отвернуть вправо с увеличением скорости до первоначальной и разойтись с судами на расстоянии не менее Дз.
Определить скорость первого маневра, Vн, курс второго этапа маневра Кн и судовое время изменения скорости, курса и время возврата на первоначальный курс.
| № задачи | Кн, º | Vн, уз. | Тс, ч.мин | Дз | А | В | С | |||
| П, º | Д, мили | П, º | Д, мили | П, º | Д, мили | |||||
| 11,0 | 18.09 18.15 | 1,0 | 6,0 4,9 | 5,0 4,0 | 5,0 3,2 | |||||
| 20,0 | 19.33 19.39 | 1,5 | 2,5 2,5 | 8,0 6,0 | 5,0 4,0 | |||||
| 14,0 | 20.41 20.47 | 2,0 | 295,5 | 9,0 6,2 | 9,5 | 8,5 6,2 | 2,5 2,5 | |||
| 21,0 | 21.40 21.46 | 2,0 | 9,5 7,4 | 2,2 2,2 | 5,0 5,0 | |||||
| 24,0 | 22.21 22.27 | 2,0 | 2,2 2,2 | 8,0 6,2 | 3,0 2,4 | |||||
| 15,0 | 23.42 23.48 | 2,0 | 10,5 8,0 | 3,7 3,1 | 8,0 6,0 | |||||
| 17,0 | 23.54 24.00 | 1,5 | 7,0 4,7 | 1,7 1,7 | 8,0 6,0 | |||||
| 12,0 | 15.14 15.20 | 1,2 | 8,0 5,8 | 6,0 4,8 | 2,0 2,3 | |||||
| 18,0 | 11.25 11.31 | 1,0 | 6,0 5,0 | 1,2 1,2 | 3,5 3,5 | |||||
| 18,0 | 14.32 14.38 | 1,0 | 5,5 4,5 | 1,3 1,3 | 1,5 1,5 |
Ответить на вопросы:
1. Дать определение термина «упрежденная точка».
2. Дать определение термина «опасное судно».
3. Дать определение термина «потенциально опасное судно».
4. Дать определение термина «лимитирующее судно».
5. Дать определение линейного и временного критерия оценки опасности столкновения.
6. Причины создания САРП.
7. Назначение САРП и решаемые ими задачи.
8. Первичная и вторичная информация на экране САРП.
9. В каких формах на экране САРП должна изображаться вторичная информация?
10. Преимущества и недостатки режимов ориентации изображения на экране «Север», «Курс» и «Курс стабилизированный».
11. Как сказываются на работе САРП погрешности от РЛС, лага и гирокопмаса?
12. Требования ИМО к точности определения параметров сближения в контрольных ситуациях.
13. Погрешности САРП в интерпретации оператора.
14. Виды захватов целей.
15. Какое минимальное количество целей, согласно требований ИМО, должно быть взято на автосопровождение при автоматическом и ручном захвате?
16. Каков приоритет захвата целей в режиме автозахвата?
17. Сколько местоположений судна, согласно требований ИМО, должно отображаться на экране за последние 8 минут?
18. Что такое экстрополяция векторов?
19. Что такое охранные кольца?
20. В каких случаях срабатывает световая и звуковая сигнализация САРП?
Рекомендованная литература
1. МППСС-72.
2. Сборник задач по использованию радиолокатора для предупреждения столкновения судов. Учебное пособие ВУЗов. Ю.К. Баранов, М.М. Лесков, Н.А. Кубачев, С.С. Кургузов. – М. Транспорт, 1989. – 96 с.
3. Мальцев А.С. Маневрирование судов при расхождении. Одесса, 2002. – 208 с.
4. Методическое пособие по решению задач на маневренном планшете при ограниченной видимости. Ю.В. Сергейчик, С.Б. Логвиненко. Одесса ЛАТСТАР, 2001. – 88 с.
Составил: