ПОДГОТОВКА ИНФОРМАЦИИ ДЛЯ УПРАВЛЯЮЩИХ ПРОГРАММ
Представление траектории обработки.
Детали, обрабатываемые на станках с ЧПУ, можно рассматривать как геометрические объекты. При обработке детали инструмент и заготовка перемещаются относительно друг друга по определенной траектории. Программа обработки детали задает (описывает) движение определенной точки инструмента - его центра (Р). Для концевой фрезы со сферическим торцом это центр полусферы, для концевой цилиндрической, сверла, зенкера, развертки - центр основания, для резцов - центр дуги окружности при вершине и т. д. (рис. 1.15). Если принять, что радиус инструмента во время обработки детали по контуру остается постоянным, то траектория центра инструмента при контурной обработке является эквидистантной контуру детали (рис. 1.15, а - е). Однако это встречается не всегда. Траектория движения центра инструмента может существенно отличаться от линий контура детали (рис. 1.15,ж - л), так как в противном случае эквидистантное перемещение инструмента или перемещение инструмента точно по контуру привело бы к погрешности обработки. Поэтому в ряде случаев под эквидистантой понимают такую траекторию движения центра инструмента, при которой обеспечивается обработка заданного контура.
Движение по эквидистанте относится только к траектории рабочих ходов. Перемещения центра инструмента при обработке детали могут быть также подготовительными и вспомогательными. Характер этих движений во многом зависит от задаваемого в начале программирования положения исходной (нулевой) точки, от расположения приспособления и т. д.
Из сказанного ясно, что для обработки детали по программе прежде всего необходимо определить рабочие, подготовительные и вспомогательные траектории перемещения центра принятого для работы инструмента.
Относительно контура обрабатываемой детали траектория движения центра инструмента при обработке может располагаться по-разному: совпадать с контуром, быть эквидистантной контуру, изменять положение относительно контура по определенному закону. Для полной обработки детали (для выполнения заданной операции) траектория движения центра инструмента должна быть непрерывной. Разработать (определить) ее сразу как единое целое практически очень трудно, поскольку в общем случае программируемая траектория является достаточно сложной, определяющей перемещения центра инструмента в пространстве. Поэтому в практике программирования траекторию инструмента представляют состоящей из отдельных, последовательно переходящих друг в друга участков, причем эти участки могут быть или участками контура детали, или участками эквидистанты.
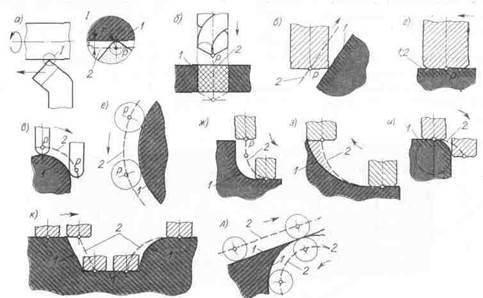
Рис. 1.15. Схемы траекторий центра инструмента:
1 - контур детали; 2 - траектория движения центра инструмента
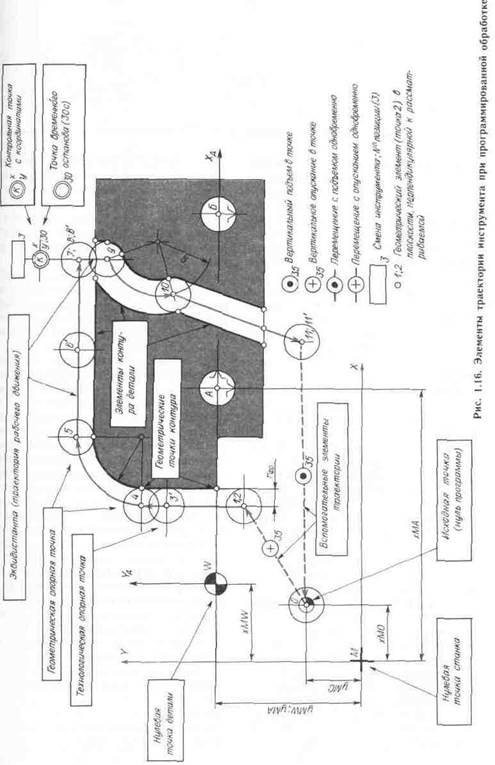

Рис. 1.17. Системы координат: а - прямоугольная; б - цилиндрическая; в - сферическая
В общем случае участки траектории движения центра инструмента и траекторию в целом удобно представить графически, исходя из зафиксированного определенным образом положения контура обрабатываемой детали (рис. 1.16).
Отдельные участки контура детали и эквидистанты называются геометрическими элементами. К ним относятся отрезки прямых, дуги окружностей, кривые второго и высших порядков. Точки пересечения элементов или перехода одного элемента в другой находят как геометрические опорные (узловые) точки. Эти точки в большинстве случаев являются определяющими при задании положения элементов контура (эквидистанты) в пространстве. Это положение, так же как и величина и направление движения инструмента, задается в системе координат с определенной заданной нулевой точкой. Такая точка может быть у станка - нулевая точка станка (нуль станка) или у детали - нулевая точка детали (нуль детали). Она является началом системы координат данной детали.
Нуль детали W (см. рис. 1.16) может быть задан относительно нуля станка М соответствующими координатами xMW, yMW. Свою систему координат имеет инструмент, приспособление. Естественно, что при программировании следует учитывать взаимосвязь всех систем координат (см. гл. 2).
В системе координат станка координатами хМ0 и уМ0 может быть задана исходная точка 0, которая используется для начала работы по программе. Обычно с этой точкой перед началом работы совмещают центр инструмента.
В станках с ЧПУ наиболее употребительны прямоугольные (декартовы), цилиндрические и сферические системы координат (рис. 1.17).
В прямоугольной системе координатами некоторой точки А называются взятые с определенным знаком расстояния х, у и z от этой точки до трех взаимно перпендикулярных координатных плоскостей. Точка пересечения координатных плоскостей называется началом координат, а координаты х, у, z - соответственно абсциссой, ординатой и аппликатой.
В цилиндрической системе координат положение точки в пространстве задается полярными координатами: радиусом и центральным углом (положение проекции точки на основной плоскости), а также аппликатой z - расстоянием от точки до основной плоскости.
В сферической системе координат точка задается длиной радиус-вектора R, долготой и полярным углом .

Рис. 1.18. Схема определения координат опорных точек контура детали (а) и траектории движения центра инструмента (б)
Переход из одной системы координат в другую осуществляется путем несложного пересчета.
Таким образом, в определенной системе координат контур детали и траектория перемещения центра инструмента относительно этого контура могут быть представлены геометрическими элементами с опорными точками, заданными координатами или в пространстве, или на плоскости (рис. 1.18).
На траектории движения центра инструмента могут быть назначены также технологические опорные точки, т. е. точки, где изменяются какие-то технологические параметры, например подача инструмента и др., точки временного останова с указанием времени останова и т. д. (см. рис. 1.16).
При обработке детали инструмент может перемещаться или в одной плоскости - плоская обработка, при которой используются две управляемые координаты, или иметь сложное перемещение в пространстве - объемная обработка. Однако чаще всего объемные поверхности деталей обрабатывают строчками, каждая из которых является плоской кривой.
Опорные точки на траектории движения инструмента позволяют представить эту траекторию как определенную последовательность точек, проходимых центром инструмента (см. рис. 1.16) при обработке детали. Каждое из положений (каждая опорная точка) в выбранной системе координат может быть определено числами, например координатами. Сочетание таких чисел, определяющих ряд последовательных положений инструмента, или, иначе, ряд опорных точек траектории, и будет представлять основную часть программы работы станка, выраженную в числовом виде (см. рис. 1.18).

Рис. 1.19. Схема расположения детали на станке: а - деталь в системе координат детали; б - размещение детали на станке; в - система координат приспособления

Рис. 1.20. Схемы задания координат опорных точек /—3: а — абсолютные размеры; б — размеры в приращениях
В начале программирования в системе координат детали ХдУдZд задают положение базовых элементов заготовки (рис. 1.19, а). Относительно нуля детали (точка W) задаются при программировании все опорные точки, определяющие траекторию движения центра инструмента при обработке.
При установке детали на станок (рис. 1.19,6) положение нуля детали (точки W) будет зафиксировано относительно координатной системы станка XYZ координатами xMW, yMW, zMW.
Если при обработке детали используют приспособление (рис. 1.19, а), то оно должно быть закоординировано на станке относительно нуля станка (точки М).
Система ZиNХи определяет координатную систему инструмента (см. рис. 1.19, б).
Естественно, что при установке детали в приспособлении координатная система детали XдWYд должна совпадать с координатной системой приспособления XпGYп.
При обработке детали при движении по элементам траекторий (прямым, дугам, кривым) в промежутках между опорными точками инструмент в определенных случаях может перемещаться по траектории, несколько отличающейся от заданной. Однако можно задать такое число опорных точек, при котором отклонения фактической траектории от требуемой будут меньше некоторой наперед заданной величины и деталь будет обработана в пределах заданной точности.
Таким образом, начальный этап представления траектории обработки детали связан прежде всего с получением координат опорных точек траектории. Эти координаты могут быть выражены абсолютными размерами, т. е. для каждой опорной точки заданными относительно нулевой точки станка или детали (рис. 1.20, а), или задаваться в виде приращений в направлении движения инструмента от одной опорной точки к другой (рис. 1.20,6). При записи УП способ задания кодируется буквенно-цифровыми символами G90 (абсолютные координаты) и G91 (размеры в приращениях). Так, при перемещении центра инструмента (рис. 1.20, б) из точки W в точку I координата х изменится на величину х1, а координата у - на величину y1; при дальнейшем движении из точки 1 в точку 2 приращение по оси Х составит Х2, по оси Y - y2 и т. д. Задание координатами точек траектории движения центра инструмента зависит во многом от способа задания размеров детали (рис. 1.21).
В большинстве систем ЧПУ работой станка управляют дискретно, с помощью импульсов. Цена одного импульса (наименьшее программируемое перемещение), или дискретность системы, отражает разрешающую способность комплекса, включающего систему ЧПУ, механизм подач и датчики обратной связи. Исходя из дискретности системы приращения координат между опорными точками траектории можно выразить не в мм, а количеством импульсов. Например, если дискретность по оси Х составляв 0,01 мм/имп., а по оси У - 0,02 мм/имп. то значения x и у, равные, например соответственно 12,85 мм и 8,6 мм, в импульсах будут выражены следующим образом: x = 1285 имп., y = 430 имп.

Рис. 1.21. Схемы задания размеров деталей: а - абсолютные размеры (х, у); б - относительные размеры (х, у):
Задание приращений по двум осям координат, однако, еще не определит заданного прямолинейного движения инструмента между точками. Даже при постоянной скорости подачи по осям вследствие неравенства координат заданной точки (x1 y1) время движения по оси Х не будет равно времени движения по оси Y и заданная траектория будет искаженной (на рис. 1.22, а показано штрихами). Как уже говорилось, приблизить фактическую траекторию к заданной можно введением дополнительных (промежуточных) опорных точек (точки 2 - 5 на рис. 1.22,6) и заданием соответствующей последовательности перемещений инструменту между этими точками, например: (х, у); (2х); (2x, 2у); (х); (х, у). Т.е. траекторию по сравнению с ранее определенной (см. рис. 1.22, а) приходится разбивать на более мелкие участки. Величина определит ошибку в отработке.
При программировании введение дополнительных опорных точек приводит к резкому увеличению расчетов и объема программы. Поэтому в практике детальное представление заданной траектории движения инструмента между двумя опорными точками (с выдачей команд на соответствующие перемещения по осям) осуществляется с помощью специального вычислительного устройства - элемента УЧПУ - интерполятора. Интерполятор непрерывно, т. е. в каждый данный момент, в процессе перемещения (в соответствии с заданными приращениями) инструмента от одной опорной точки к другой поддерживает функциональную связь между координатами опорных точек, т. е. обеспечивает отработку траектории в зависимости от вида функции. Если функция выражает прямую линию, то отрабатываемая траектория будет линейной, а интерполятор называется линейным. В процессе работы такой интерполятор при исходных заданных приращениях x1 и y1 (см. рис. 1.22, а) непрерывно должен поддерживать такое соотношение скоростей движения инструмента по осям, при котором инструмент будет перемещаться по заданной линейной траектории.

Рис. 1.22. Линейные траектории перемещения центра инструмента
Обеспечить точно функциональную связь между движениями по осям координат в каждой данной точке траектории очень сложно. В большинстве существующих станков перемещение инструмента по заданной траектории осуществляется приближенно, путем включения подачи попеременно то вдоль одной, то вдоль другой оси. При этом интерполятор системы управления непрерывно оценивает отклонения от заданной траектории и стремится свести эти отклонения к минимуму. Скачки ступенчатой траектории при формировании заданной незначительны. Они равны или кратны цене одного управляющего импульса, поступающего из интерполятора, или импульса, формируемого датчиком обратной связи. Например, прямая наклонная линия может формироваться попеременной подачей на приводы импульсов в такой последовательности: один импульс по оси Y и два импульса по оси Х (рис. 1.22, в). Поскольку в современных станках наиболее часто цена импульса принимается равной 0,001 мм, то перемещение между двумя соседними опорными точками практически можно рассматривать как плавное. Интерполяция может быть также круговой, с помощью полиномов второй и высших степеней и др.
Работа интерполятора как вычислительной машины основана на решении определенных задач. Известно несколько методов интерполяции, среди которых наиболее распространен метод оценочной функции, основанный на решении алгебраических уравнений прямой линии (в случае линейной интерполяции) и уравнения окружности (в случае круговой интерполяции).
При линейной интерполяции отрезок прямой рассматривается в системе координат, начало которой совмещено с начальной точкой Т0 интерполируемого отрезка T0Tк (рис. 1.23, а). Оценочную функцию для любой из промежуточных точек Тi траектории вдоль прямой можно выразить формулой:
Fij = YiXk - XiYk,
где Xk, Yk - координаты конечной точки Tk интерполируемого отрезка; координаты начальной точки при интерполяции отрезка прямой равны нулю; Xi, Yi - текущие координаты точки Ti траектории, определяемые числом элементарных дискретных перемещений i вдоль оси Х и j вдоль оси Y.
Логическая сущность оценочной функции состоит в том, что для всех точек заданной прямой справедливо (рис. 1,23, а) соотношение Yk/Xk=Yi/Xi, или
YkXi=YiXk.
Разность произведений YjXk - YkXi = Fij определит зону, где расположена точка. Естественно, что при Fij = 0 точка находится на прямой. Если Fij> 0, то точка находится выше прямой (например, Yi больше, чем требуется, или Xi меньше); при Fij< 0 точка находится (рис. 1.23, б) ниже прямой (например, Yi меньше, чем требуется, или Xi больше). Таким образом, можно считать, что интерполируемая прямая делит плоскость на две части: область F> 0, где оценочная функция после подстановки в нее координат точек этой области принимает положительные значения, и область F<0, где значения оценочной функции отрицательны. Интерполятор определяет последовательность элементарных дискретных перемещений в зависимости от квадранта, в котором расположен интерполируемый отрезок. Для случая, когда отрезок находится в первом квадранте системы координат, направление элементарного дискретного перемещения определяется в зависимости от расположения предыдущей точки: если она находится в области F0, то дискретное перемещение осуществляется вдоль оси X, если в области F<0, то вдоль оси Y. И так до тех пор, пока текущая точка траектории не совпадет с точкой конца интерполируемого отрезка.
В соответствии с принятым характером перемещений интерполятор выдает попеременно импульсы управления то по одной, то по другой координате. Например (рис. 1.24, а), если из начальной точки Т0 согласно поданному импульсу управления центр инструмента переместился по траектории T0—1, то интерполятор, определив для координат точки 1 значение функции Fij = YiXk - YkXi <0, следующие импульсы будет подавать в цепь управления приводом подач станка по оси Y. После подачи каждого импульса интерполятор определяет значение оценочной функции. Как только после подачи очередного импульса оценочная функция (Fij = Y2Xk - YkX1} изменится, т. е. станет либо равна нулю, либо больше нуля (в точке 2, рис. 1.24, а), интерполятор опять начнет выдавать импульсы для управления приводом перемещения по оси X, прекратив подачу импульсов в привод управления перемещением по оси Y (рис. 1.24,6). В точке 3 значение Fij=Y2Xk - YkX3 станет меньше нуля и интерполятор обеспечит движение к точке 4, выдавая импульсы в привод перемещения по Y. И так далее для всего отрезка от точки Т0 до точки Тk. Следует иметь в виду, что количество импульсов на отрезке перемещения от точки к точке зависит от дискретности системы УЧПУ.

Рис. 1.23. Схемы к определению оценочной функции:
При круговой интерполяции начало системы координат совмещается с центром окружности радиуса R (рис. 1.25, а). Оценочная функция для любой из промежуточных точек траектории вдоль окружности выражается формулой Fij = X2i + Y2i - R2. Формула получена из соотношения X2i + Y2i = R2, справедливого для точек, лежащих на дуге.

Рис. 1.24, 1.25. Линейная и круговая интерполяция по методу оценочной функции
Окружность делит плоскость на две части: область F> 0, расположенную вне окружности, и область .F<0, находящуюся внутри нее. В зависимости от направления движения вдоль окружности (по или против часовой стрелки) и квадранта расположения интерполируемой дуги выбирается правило определения последовательности элементарных дискретных перемещений. Для иллюстрируемого случая проверяется положение текущей точки: если F0, дискретное перемещение осуществляется в отрицательном направлении оси X, а если F<0 - в положительном направлении оси Y. Интерполяция начинается в точке Т0 и продолжается до тех пор, пока не будет достигнута точка Tk дуги окружности или граница квадранта. Выполняя работу, интерполятор соответственно направляет импульсы в привод подач то по X, то по Y (рис. 1.25,6).
Помимо расчета необходимого количества импульсов для подачи в систему привода той или иной оси интерполятор обеспечивает и выдачу этого количества для управления. Поскольку в УЧПУ большое распространение получили интерполяторы, построенные по схеме импульсных умножителей, кратко рассмотрим работу такого интерполятора (рис. 1.26). Задающим элементом УЧПУ является генератор импульсов (ГИ), который формирует импульсы и подает их с определенной частотой на счетчик интерполятора. Как правило, частота подаваемых импульсов определяется в зависимости от программируемой подачи. Для ряда систем ЧПУ частота рассчитывается и записывается в УП. Счетчик построен таким образом, что на каждые десять входящих в него импульсов (от генератора) с первого его выхода на вход в логический элемент И (Э1) поступает восемь импульсов; со второго - четыре (Э2); с третьего - два (ЭЗ) и с четвертого - один (Э4), т. е. в системе имеется возможность получения импульсов со счетчика в соответствии с разрядами двоичной системы счисления (8421). Вторые входы элементов И {Э1 - Э4) соединены с разрядами регистра памяти интерполятора, в которой в каждый данный момент находится кодированная (в двоично-десятичном коде) информация о задаваемом перемещении (указано количество импульсов). Следовательно, на вторые входы элементов И с соответствующих разрядов регистра памяти будут поступать нули или единицы, т. е. данные управляющей программы. Так как на вход элементов Э1 - Э4 непрерывно подаются импульсы от генератора в соотношении 8421, то возможность их прохождения через эти элементы к выходному (суммирующему) элементу Э5 определят сигналы на элементы Э1 - Э4 от регистра памяти. Если на элементы Э1 - Э4 с регистра памяти поступят единицы, то эти элементы пропустят импульсы от счетчика, а если нули - то нет. Итак, на выходе рассмотренного блока линейного интерполятора формируется число импульсов, соответствующих коду, записанному в регистре памяти.

Рис. 1.26. Функциональная схема линейного интерполятора

Рис. 1.27. Функциональная схема блока декад линейного интерполятора: Э1 - Э17 - логические элементы; Т1 - Т4 - счетчики

Рис. 1.28. Структурная схема отбора импульсов со счетчика
Например, программой задано и введено в регистр памяти число семь; в двоично-десятичном коде оно имеет вид 0111 (см. рис. 1.26). Восемь импульсов с первого выхода счетчика не пройдут элемент И (Э1), так как на второй вход Э1 из регистра памяти поступает нуль. Следовательно, с выходов счетчика пройдут на элемент ИЛИ (Э5) соответственно четыре, два и один импульс. В результате на выходе блока интерполятора (элемента Э5) будет сформировано семь импульсов, что соответствует коду в регистре памяти в данный момент.
В целом линейный интерполятор построен из нескольких блоков, подобных рассмотренному. Интерполятор может быть выполнен с четырьмя блоками декад: тысяч, сотен, десятков и единиц координат {X, Y, Z). При этом двоично-десятичный счетчик представляет собой последовательное соединение четырех декад: тысяч, сотен, десятков и единиц (рис. 1.28). Импульсы переполнения младших декад служат входными импульсами для последующих, старших. Выходы счетчика по одной координате во всех декадах объединены и представляют одну шину отбора {X, Y или Z), на которую поступает столько импульсов, сколько закодировано в программе и записано в память по данной координате в данном кадре.
Таким образом, как видно из сказанного, объем работ по программированию во многом зависит от системы интерполяции, заложенной в системе управления станком.
Аппроксимация дуг окружностей.
На станках с ЧПУ, снабженных лишь линейными интерполяторами, программирование обработки деталей затруднено, если траектории выражены дугами окружностей и кривыми другого порядка. Дуги окружностей для ввода информации в УЧПУ с линейным интерполятором аппроксимируют ломаными линиями с введением по дуге определенного числа опорных точек (рис. 1.29). Величина элементарных участков между точками - участков аппроксимации - зависит от углового шага - центрального угла дуги, которую заменяют хордой, секущей или касательной.
Угловой шаг , а следовательно, и число опорных точек на дуге зависят при заданном радиусе R от принимаемого значения стрелки прогиба , определяющей точность аппроксимации, т. е. степень приближения ломаной линии к дуге окружности. Естественно, что чем меньше значение принятого углового шага, тем ближе обработанный контур будет по форме приближаться к круговому (заданному). Но при программировании следует учитывать также, что уменьшение приводит к увеличению расчетных работ и объема программы из-за увеличения числа опорных точек.
Угловой шаг для заданного радиуса и назначенной величины можно определить или расчетом, или по таблицам, или ориентировочно по графикам. При выборе углового шага следует учитывать характер траектории инструмента.
В современных условиях большинство станков с ЧПУ оснащены УЧПУ с линейно-круговыми интерполяторами, поэтому заниматься вопросами аппроксимации дуг окружностей технологу-программисту приходится сравнительно редко. Эти задачи встречаются в настоящее время лишь при расчетах по аппроксимации кривых второго порядка.
При программировании обработки кроме определения величины перемещения центра инструмента по траектории необходимо указать скорости перемещения инструмента между отдельными опорными точками, целый ряд вспомогательных технологических команд и др. Все это оформляется в виде расчетно-технологической карты (РТК) на обработку данной детали и карты кодирования программы.
В общем случае для составления УП необходимо иметь операционный эскиз детали, чертеж заготовки и РТК, дополненную таблицей координат опорных точек или расстояний между точками (приращений).

Рис. 1.29. Линейная аппроксимация дуги окружности