Комп’ютерно-інтегровані системи управління
МІНІСТЕРСТВО ОСВІТИ І НАУКИ, молоді та спорту україни
ХЕРСОНСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
Кафедра Технічної КІБЕРНЕТИКи
Реєстр. № 34/342-27.02.13
КОНСПЕКТ ЛЕКЦІЙ
З ДИСЦИПЛІНИ
Комп’ютерно-інтегровані системи управління
| Напрям підготовки | 6.050201 – системна інженерія; |
| Галузь знань | 0502 – автоматика та управління. |
| Факультет | Кібернетики. |
Херсон – 2013
Конспект лекцій з дисципліни «Компьютерно-інтегровані системи управління» для студентів денної форми навчання спеціальності 6.050201 – системна інженерія, галузь знань 0502 – автоматика та управління.
«___» _____________ 2013 р. 216 с.
Розробник: Тимофеєв К.В., к.т.н., доцент кафедри «Технічна кібернетика»
Конспект лекцій затверджений на засіданні кафедри «Технічна кібернетика»
Протокол від «15» лютого 2013 р. № 11
| Завідувач кафедри ТК д.т.н., проф. «___» _____________ 2013 р. | Марасанов В.В. |
ЗМІСТ
Лекція 1. Архітектура автоматизованИХ систем.. 8
1.1. Різновиди архітектури. 8
1.2. Вимоги до архітектури. 9
1.3. Розподілені системи автоматизації. 13
1.4. Багаторівнева архітектура. 16
Лекція 2. Застосування Інтернет-технологій.. 19
2.1. Проблеми і їх рішення. 20
2.2. Основні поняття технології Інтернету. 20
2.3. Принципи управління через Інтернет. 22
Лекція 3. Відкриті системи.. 25
3.1. Поняття відкритої системи. 25
3.2. Властивості відкритих систем. 26
3.3. Засоби досягнення відкритості 29
3.4. Переваги і недоліки. 30
Лекція 4. Промислові мережі і інтерфейси.. 33
4.1. Відмінність промислових мереж від офісних. 33
4.2. Основні поняття промислових мереж. 33
4.3. Модель OSI 37
Лекція 5. Інтерфейси RS-485, RS-422 і RS-232. 41
5.1. Принципи побудови. 41
5.2. Узгодження лінії з передавачем і приймачем. 44
5.3. Топологія мережі на основі інтерфейсу RS-485. 47
5.4. Усунення стану невизначеності лінії 48
5.5. Крізні струми. 49
5.6. Інтерфейси RS-232 і RS-422. 50
Лекція 6. Комплекс стандартів CAN.. 52
6.1. Основні властивості CAN. 53
6.2. Фізичний рівень Саn. 53
6.3. Типова структура трансівера Саn. 55
6.4. Канальний рівень Саn. 58
7.1. Загальні відомості про Profibus. 60
7.2. Фізичний рівень. 61
7.3. Канальний рівень Profibus DP. 62
7.4. Резервування. 66
7.5. Опис пристроїв. 67
ЛЕКЦІЯ 8. Промислова мережа Modbus. 69
8.1. Загальні відомості про протокол Modbus. 69
8.2. Фізичний рівень. 70
8.3. Канальний рівень. 71
8.4. Прикладний рівень. 73
ЛЕКЦІЯ 9. Промисловий Ethernet. 75
9.1. Особливості Ethernet.. 75
9.2. Фізичний рівень. 77
9.3. Канальний рівень. 83
Лекція 10. БЕЗПРОВІДНІ ЛОКАЛЬНІ МЕРЕЖІ 86
10.1. Проблеми безпровідних мереж.. 87
10.2 Залежність щільності потужності від відстані. 88
10.3 Вплив інтерференції хвиль. 88
10.4 Джерела перешкод. 89
10.5 Деякі особливості безпровідних каналів. 90
ЛЕКЦІЯ 11 МЕТОДИ УСУНЕННЯ ПЕРЕШКОД ТА ПІДВИЩЕННЯ НАДІЙНОСТІ ЗВ’ЯЗКУ.. 92
11.1 Широкосмугова передача. 92
11.2 Методи розширення спектру і модуляції несучої. 94
11.3 Методи зменшення кількості помилок в каналі. 96
11.4 Передача повідомлень без підтвердження про отримання. 97
ЛЕКЦІЯ 12. СТАНДАРТИ БЕЗПРОВІДНИХ МЕРЕЖ.. 99
12.1. Стандарт Bluetooth. 99
12.2. Стандарт ZigBee. 100
12.3. Модель передачі даних. 104
ЛЕКЦІЯ 13. МЕРЕЖА WI-FI І IEEE 802.11. 108
13.1. Фізичний і канальний рівні. 108
13.2. Архітектура мережі Wi-Fi. 110
13.3. Порівняння безпровідних мереж.. 111
ЛЕКЦІЯ 14. МЕРЕЖЕВЕ УСТАТКУВАННЯ.. 112
14.1. Повторювачі інтерфейсу. 112
14.2. Перетворювачі інтерфейсу. 114
14.3. Адресовані перетворювачі інтерфейсу, 116
14.4. Інше мережеве устаткування. 117
14.5. Кабелі для промислових мереж.. 119
ЛЕКЦІЯ 15 ЗАХИСТ ВІД ПЕРЕШКОД.. 122
15.1. Джерела перешкод. 123
15.2. Характеристики перешкод. 123
15.3. Перешкоди з мережі електропостачання. 125
15.4. Електромагнітні перешкоди. 128
ЛЕКЦІЯ 16. ЗАЗЕМЛЕННЯ.. 131
16.1. Визначення. 131
16.2. Цілі заземлення. 132
16.4. Види заземлень. 136
ЛЕКЦІЯ 17. ВИМІРЮВАЛЬНІ КАНАЛИ. 138
17.1. Точність, що вирішує здатність і поріг чутливості 138
17.2. Похибка методу вимірювань. 140
17.3. Похибка програмного забезпечення. 141
17.4. Достовірність вимірювань. 141
ЛЕКЦІЯ 18. ПЛК ДЛЯ СИСТЕМ АВТОМАТИЗАЦІЇ. 144
18.1. Типи ПЛК. 144
18.2. Архітектура. 145
18.3. Характеристики ПЛК. 147
18.4. Пристрої збору даних. 150
ЛЕКЦІЯ 19. КОМП'ЮТЕР В СИСТЕМАХ АВТОМАТИЗАЦІЇ 153
19.1. Комп'ютер як контроллер. 153
19.2. Комп'ютер для спілкування з оператором. 154
19.3. Промислові комп'ютери. 155
ЛЕКЦІЯ 20. ПРИСТРОЇ ВВОДУ АНАЛОГОВИХ СИГНАЛІВ. 159
20.1. Введення аналогових сигналів. 159
20.2. Структура модулів вводу. 159
20.3. Модулі вводу струму і напруги. 162
ЛЕКЦІЯ 21. ПРИСТРОЇ вводу-ВИВОДУ. 164
21.1. Виведення аналогових сигналів. 164
21.2. Введення дискретних сигналів. 167
21.3. Виведення дискретних сигналів. 170
ЛЕКЦІЯ 22. МОДУЛІ ВВОДУ ІМПУЛЬСНИХ ПОСЛІДОВНОСТЕЙ І УПРАВЛІННЯ. 173
22.1. Типовий модуль вводу частотних сигналів. 173
22.2. Модулі управління рухом. 175
ЛЕКЦІЯ 23. ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ. 178
23.1. Розвиток програмних засобів автоматизації. 178
23.2. Графічне програмування. 180
23.3. Графічний інтерфейс. 181
23.4. Відкритість програмного забезпечення. 181
23.5. Зв'язок з фізичними пристроями. 182
23.6. Бази даних. 182
23.7. Операційні системи реального часу. 183
ЛЕКЦІЯ 24. ОРС-СЕРВЕР. 186
24.1. Огляд стандарту ОРС. 186
24.2. ОРС DA-сервер. 187
ЛЕКЦІЯ 25. МОДИФІКАЦІЇ ТА ЗАСТОСУВАННЯ ОРС UA –СЕРВЕРІВ.. 192
25.1. Специфікація OPC UA. 192
25.2. ОРС DA-сервер в середовищі MS Excel. 196
25.3 Застосування ОРС-сервера з MATLAB і Lab VIEW... 198
ЛЕКЦІЯ 26. Системи програмування на мовах МЕК 61131-3. 199
26.1. Мова релейноконтактних схем LD. 200
26.2. Список інструкцій IL. 201
26.3. Структурований текст ST. 202
26.4. Діаграми функціональних блоків FBD. 202
26.5. Функціональні блоки стандартів МЕК 61499 і МЕК 61804. 203
26.6. Послідовні функціональні схеми SFC. 205
26.7. Програмне забезпечення. 206
Лекція 27. Призначений для користувача інтерфейс, SCADA-пакетИ. 209
27.1. Функції SCADA. 209
27.2. Властивості SCADA. 212
27.3. Програмне забезпечення. 214
Лекція 1. Архітектура автоматизованИХ систем
1.1. Різновиди архітектури.
1.2. Вимоги до архітектури.
1.3. Розподілені системи автоматизації.
1.4. Багаторівнева архітектура.
1.1. Різновиди архітектури.
Існує величезна різноманітність датчиків (температури, вологості, тиску, потоку, швидкості, прискорення, вібрації, ваги, натягнення, частоти, моменту, освітленості, шуму, об'єму, кількості теплоти, струму, рівня і ін.), які перетворюють фізичну величину в електричний сигнал. Якщо параметри сигналу не узгоджуються з параметрами входу аналого-цифрового перетворювача (АЦП) або не відповідають стандарту (наприклад, вхідною величиною АЦП є напруга в діапазоні 0...10 В, а датчик (термопара) має вихідну напругу в діапазоні від 0 до 100 мВ), то використовують вимірювальний перетворювач (рис. 1.1), який забезпечує нормалізацію сигналу датчика (приведення до стандартних діапазонів зміни, забезпечення лінійності, компенсацію погрішності, посилення і тому подібне). Вимірювальні перетворювачі зазвичай суміщають з модулями аналогового введення.
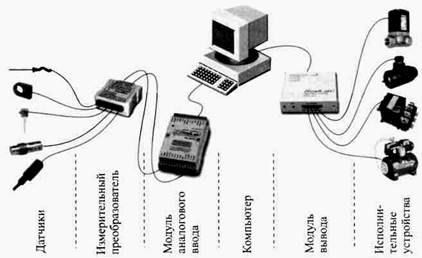
Рис. 1.1. Простий варіант автоматизованої системи з одним комп'ютером, одним пристроєм вводу і одним пристроєм виводу
Для введення в комп'ютер аналогових сигналів служать модулі аналогового вводу (рис. 1.1). Модулі вводу можуть бути загального застосування (універсальні) або спеціалізовані. Прикладом універсального модуля вводу є NL-8AI (www.RealLab.ru), який сприймає сигнали напруги в діапазонах ±150 мВ ±500 мВ ±1В ±5В ±10В і струму в діапазоні ±20 мА.
Окрім модулів аналогового вводу широко поширені модулі дискретного вводу, які не містять АЦП і дозволяють вводити сигнали, що мають два рівні (наприклад, сигнали від кінцевих вимикачів, датчиків відкриття дверей, пожежних датчиків, охоронних датчиків руху і т. п.). Рівні вхідних сигналів модулів дискретного вводу можуть змінюватися в діапазоні, як правило, 0...24 В або 0...220 В. Модулі з входом 220В використовуються, наприклад, для реєстрації наявності напруги на клемах електродвигуна або нагрівального приладу.
Окреме місце займають пристрої рахункового вводу, які мають дискретний вхід і дозволяють рахувати кількість або частоту проходження імпульсів. Їх використовують, наприклад, для вимірювання швидкості обертання валу електродвигуна або підрахунку продукції на конвеєрі.
Комунікації між комп'ютером і пристроями вводу-виводу виконуються через послідовні інтерфейси, наприклад, USB, CAN, RS-232, RS-485, RS-422, Ethernet або паралельний інтерфейс LPT. Іноді пристрої вводу-виводу виконують у вигляді плат, які вставляють безпосередньо в комп'ютер, в роз'єми шини PCI або ISA. Гідністю плат є можливість отримання високої пропускної спроможності каналів вводу-виводу (понад 10 Мбіт/с), що важко досягнути при використанні зовнішніх пристроїв з послідовним портом. Недоліком є вищий рівень електромагнітних наведень від комп'ютера і конструктивні обмеження на кількість каналів вводу-виводу.
У автоматизованих системах замість комп'ютера або одночасно з ним часто використовують програмований логічний контролер (ПЛК). Типовими відмінностями ПЛК від комп'ютера є спеціальне конструктивне виконання (для монтажу в стійку, панель, на стіну або в технологічне устаткування), відсутність механічного жорсткого диску, дисплею і клавіатури. Контролери також мають малі розміри, розширений температурний діапазон, підвищену стійкість до вібрації і електромагнітних випромінювань, низьке енергоспоживання, захищені від дій пилу і води, містять сторожовий таймер і плати аналогового і дискретного вводу-виводу, мають збільшену кількість комунікаційних портів. У контролерах, на відміну від комп'ютерів, як правило, використовується операційна система реального часу (наприклад, Windows CE, QNX).
Пристрої виводу (модулі виводу) дозволяють виводити дискретні, частотні або аналогові сигнали. Дискретні сигнали використовуються, наприклад, для включення електродвигунів, електричних нагрівачів, для управління клапанами, засувками, насосами і іншими виконавчими пристроями. Частотний сигнал використовується зазвичай для управління середньою потужністю пристроїв з великою інерційністю за допомогою широко-імпульсної модуляції.
1.2. Вимоги до архітектури.
Архітектура автоматизованої системи — це найбільш абстрактне її уявлення, яке включає моделі компонентів системи, що ідеалізуються, а також моделі взаємодій між компонентами.
Елементами архітектури є моделі (абстракції) датчиків, пристроїв вводу-виводу, вимірювальних перетворювачів, ПЛК, комп'ютерів, інтерфейсів, протоколів, промислових мереж, виконавчих пристроїв, драйверів, каналів передачі інформації.
При побудові архітектури повинні бути закладені наступні властивості майбутньої автоматизованої системи:
• слабка зв'язаність елементів архітектури між собою (тобто декомпозицію системи на частини слід проводити так, щоб потік інформації через зв'язки був мінімальний і через них не замикалися контури автоматичного регулювання);
• тестуємість (можливість встановлення факту правильного функціонування);
• діагностується (можливість знаходження несправної частини системи);
• ремонтопридатність (можливість відновлення працездатності за мінімальний час при економічно виправданій вартості ремонту);
• надійність (наприклад, шляхом резервування);
• простота обслуговування і експлуатації (мінімальні вимоги до кваліфікації і додаткового навчання експлуатуючого персоналу);
• безпека (відповідність вимогам промислової безпеки і техніці безпеки);
• захищеність системи від вандалів і некваліфікованих користувачів;
• економічність (економічна ефективність в процесі функціонування);
• модифікується (можливість перенастроювання для роботи з іншими технологічними процесами);
• функціональна розширюваність (можливість введення в систему додаткових функціональних можливостей, не передбачених в технічному завданні);
• нарощувальність (можливість збільшення розміру автоматизованої системи при збільшенні розміру об'єкту автоматизації);
• відкритість;
• можливість переконфігурації системи для роботи з новими технологічними процесами; максимальна тривалість життєвого циклу системи без істотного морального старіння, що досягається шляхом періодичного оновлення апаратних і програмних компонентів, а також шляхом вибору довгоживучих промислових стандартів;
• мінімальний час на монтаж і пуск-наладку (розгортання) системи.
Архітектура системи може бути різною залежно від вирішуваного завдання автоматизації. Такими завданнями можуть бути:
• моніторинг (тривале вимірювання і контроль з архівацією отриманої інформації);
• автоматичне управління (у системі із зворотним зв'язком або без неї);
• диспетчерське управління (управління за допомогою людини-диспетчера, яка взаємодіє з системою через людино-машинний інтерфейс);
• забезпечення безпеки.
Будь-яке з перерахованих завдань може виконуватися на великій відстані між об'єктом автоматизації і системою. В цьому випадку говорять про завдання телемеханіки (дистанційні вимірювання, управління, сигналізація). Проте у зв'язку з тим, що канали дистанційного зв'язку (Інтернет, радіоканал, опто-волоконний канал, дротяний канал) органічно входять практично в будь-яку систему автоматизації, завдання телемеханіки все рідше виділяють як самостійну.
Побудова будь-якої АСУ починається з декомпозиції (ділення на частини) системи на підсистеми. Декомпозиція може бути функціональною (алгоритмічною) або об'єктною.
При об'єктній декомпозиції використовуються розподілені системи управління, коли кожен об'єкт автоматизації обладнаний локальним технологічним контролером, вирішуючим завдання в межах цього об'єкту. При функціональній декомпозиції систему автоматизації ділять на частини, групуючи схожі функції, і для кожної групи функцій використовують окремий контролер. Обидва види декомпозиції можуть бути використані спільно. Вибір способів декомпозиції є творчим процесом і багато в чому визначає ефективність майбутньої системи.
Незалежно від методу декомпозиції, основним її результатом повинне бути представлення системи у вигляді набору слабо зв'язаних частин. Слабкий зв'язок між частинами системи означає відсутність між ними зворотних зв'язків або трохи модуля петлевого посилення за наявності таких зв'язків, а також відсутність інтенсивного обміну інформацією.
1.1.2. Проста система
Зображена|змальовувати| на мал. 1.1 система залежно від її призначення і програмного забезпечення може бути системою збору|збирання| даних, системою диспетчерського або автоматичного управління, системою контролю, випробувань, діагности і так далі Це простий варіант автоматизованої системи, побудованої|спорудити| на основі одного комп'ютера, пристроїв|устроїв| введення-виводу|висновку,виведення|, датчиків і виконавчих пристроїв|устроїв| (актуаторів|).
На мал. 1.1 датчиків приєднані до одного багатоканального вимірювального перетворювача. Проте|однак| різні типи датчиків можуть вимагати різних типів перетворювачів або працювати взагалі без них. Деякі типи інтелектуальних датчиків мають інтерфейс RS-485| і можуть підключатися безпосередньо до комп'ютера (контроллеру), як, наприклад, датчики серії NL-1S| фірми|фірма-виготовлювача| НІЛ АП (www.RealLab.ru).
Системи моніторингу (спостереження) за фізичними процесами не містять|утримують| виконавчих пристроїв|устроїв| або використовують електромагнітні (рідше напівпровідникові) реле для комутації вимірювальних кіл|цепів|.
Звичайний|звичний| офісний комп'ютер в стандартній конфігурації має два порти USB|, одного СОМА-порту, один порт принтера LPT| і порт Ethernet|, який з'являється|появляється| після|потім| установки в комп'ютер Ethernet-платы|. Кількість USB| портів можна збільшити за допомогою USB| хабов|, а кількість СОМ-портів за допомогою перетворювача USB| в СОМ (див. www.RealLab.ru). Промислові комп'ютери і контроллери зазвичай|звично| мають декілька портів RS-485|, RS-422| і оптоволоконний порт. Для застосування|вживання| оптичного каналу з|із| офісним комп'ютером до нього можна підключити оптоволоконний перетворювач інтерфейсу. Всі перераховані порти можна використовувати для обміну інформацією межу комп'ютером і зовнішніми пристроями|устроями| (мал. 1.2).

Мал. 1.2. Для підключення пристроїв|устроїв| введення-виводу|висновку,виведення| можуть бути використані всі порти комп'ютера
Для збільшення дальності передачі сигналу по лінії зв'язку до 1,2 км. можна використовувати перетворювачі інтерфейсів RS-232| в RS-485| або RS-422|, а також інтерфейс «струмова петля» (див. розділ 2).
Зовнішні пристрої|устрої|, що не мають гальванічно ізольованого порту, зазвичай|звично| підключають до комп'ютера через ізолюючі перетворювачі интерфейсів| які захищають комп'ютер від випадкового попадання високої напруги у разі|в разі| аварії або недбалого звернення|звертання,обігу|. Прикладом|зразком| ізолюючого перетворювача для порту RS-232| може бути оптичний ізолятор 01-232-1000 (www.RealLab.ru) з|із| напругою|напруженням| ізоляції 1000 В.
Якщо до комп'ютера необхідно підключити ще один пристрій|устрій|, а вільних портів не залишилося, то можна використовувати розгалуджувачі інтерфейсів. Поширені розгалуджувачі інтерфейсів USB| (їх ще називають USB-хабами|) і RS-232|. Пристрій|устрій|, що має інтерфейс RS-232|, можна підключити до USB-порту| комп'ютера, якщо використовувати перетворювач USB| в RS-232|.
До комп'ютера можуть бути підключені не тільки|не лише| спеціалізовані модулі введення-виводу|висновку,виведення|, але і багато вимірювальних приладів широкого застосування|вживання|. Наприклад, вольтметр HP| 34401A| має інтерфейс RS-232| і може бути підключений до комп'ютера і програм, підтримуючим СОМ-технологію, MS| Excel|) за допомогою СОМ-об'єкта RL232man| фірми|фірма-виготовлювачі| НІЛ АП (мал. 1.2), докладніше|детальний| за див. розділ 9.
Типовими застосуваннями|вживаннями| описаної системи може бути домашня|хатня| автоматизація| | [15], випробувальний стенд для тестування серійної продукції [16], лабораторні роботи у вузах, локальне управління технологічним процесом, контроль температури в теплиці або елеваторі (див. www.RealLab.ru ).
1.3. Розподілені системи автоматизації.
Розподілену систему управління (РСУ, DCS — Distributed Control System) можна визначити як систему, що складається з безлічі пристроїв, рознесених в просторі, кожен з яких не залежить від останніх, але взаємодіє з ними для виконання загального завдання. У граничному випадку елементи системи можуть знаходитися на різних континентах земної кулі, а зв'язок між ними може виконуватися через інтернет.
Розподілена система має наступні характеристики, що відрізняють її від зосередженої:
• більша швидкодія завдяки розподілу завдань між паралельно працюючими процесорами;
• підвищена надійність (відмова одного з контролерів не впливає на працездатність інших);
• велику стійкість до збоїв;
• простіше нарощування або реконфігурування системи;
• спрощену процедуру модернізації;
• велику простоту проектування, настройки, діагностики і обслуговування завдяки відповідності архітектури системи архітектурі об'єкту управління, а також відносній простоті кожного з модулів системи;
• покращувану перешкодостійкість і точність завдяки зменшенню довжини ліній передачі аналогових сигналів від датчиків до пристроїв введення;
• менший об'єм кабельної продукції, знижені вимоги до кабелю і нижча його вартість;
• менші витрати на монтаж і обслуговування кабельного господарства.
Модель розподіленої системи автоматизації відповідно до стандарту МЕК 61499 може бути представлена як набір фізичних пристроїв (наприклад, ПЛК), що взаємодіють між собою за допомогою однієї або декількох промислових мереж (рис. 1.2). Мережі можуть мати ієрархічну структуру.

Рис. 1.2. Модель розподіленої системи автоматизації відповідно до стандарту МЕК 61499
Кожен фізичний пристрій в розподіленій системі повинен містити принаймні один інтерфейс до об'єкту управління або до промислової мережі і може містити декілька (зокрема нуль) ресурсів (рис. 1.3). При цьому пристрій по МЕК 61499 розглядається як конкретний екземпляр певного типу пристроїв, по аналогії з об'єктно-орієнтованим програмуванням. Інтерфейс з об'єктом управління забезпечує відображення даних і подій фізичного процесу (наприклад, аналогових або дискретних сигналів) в ресурси і назад.
У одному пристрої може бути декілька ресурсів і декілька програмних застосувань. Кожне застосування може виконуватися на декількох пристроях (рис. 1.2) і може займати частину ресурсів в одному пристрої (рис. 1.3).
Комунікаційні інтерфейси виконують відображення між ресурсами і промисловою мережею. Вони можуть надавати інформацію ресурсу у вигляді даних або подій, а також виконувати додаткові функції для підтримки програмування, конфігурації, діагностики і так далі.
Ресурс розглядається як функціональна одиниця, яка міститься в пристрої (наприклад, в ПЛК), має незалежне управління своїми операціями і забезпечує різні сервісні функції (сервіси) для програмного застосування, включаючи планування і виконання алгоритмів.

Рис. 1.3. Приклад моделі одного з пристроїв, показаних на рис. 1.2 (наприклад, ПЛК 2) за стандартом МЕК 61499.
Ресурс може бути створений, конфігурований, параметризований, стартував, видалений і тому подібне без дії на інші ресурси пристрою. Прикладом ресурсу може бути пам'ять і час, виділені для виконання завдання в центральному процесорі.
У функції ресурсу входить прийом даних або подій від об'єкту управління або комунікаційного інтерфейсу, обробка даних і подій і повернення даних і подій в процес або промислову мережу, відповідно до алгоритму роботи програмного застосування, що використовує даний ресурс.
Відповідно до рис. 1.4, ресурс моделюється наступними елементами:
• локальним застосуванням, розташованим в даному фізичному пристрої, або частиною розподіленого застосування. Дані і події, що обробляються в локальному застосуванні, приймаються з входів функціональних блоків (ФБ), які виконують операції, необхідні програмному застосуванню;

Рис. 1.4. Модель ресурсу розподіленої системи за стандартом МЕК 61499
• відображення подій і даних між програмним застосуванням і об'єктом управління виконується спеціальним функціональним блоком інтерфейсу (рис. 1.4);
• відображення подій і даних між програмним застосуванням і комунікаційним інтерфейсом виконується таким же спеціальним функціональним блоком інтерфейсу (рис. 1.4);
• функція планування виконує передачу інформації і виконання програмного застосування відповідно до тимчасових вимог і черговості, визначуваної появою подій, взаємодією між функціональними блоками, а також пріоритетами або періодом виконання завдань.
Програмне застосування складається з мережі функціональних блоків, гілки якої переносять дані і події (рис. 1.5). Потік подій визначає виконання алгоритмів, що містяться у функціональних блоках. До складу функціональних блоків можуть входити і інші програмні застосування (субдодатки).

Рис. 1.5. Модель додатку розподіленої системи за стандартом МЕК 61499
Програмні застосування можуть бути розподілені між декількома ресурсами в одному або в декількох пристроях (ПЛК). Ресурс реагує на події, що поступають з інтерфейсів, наступними способами:
• плануванням і виконання алгоритму;
• модифікуванням змінних;
• генерацією у відповідь подій;
• взаємодією з інтерфейсами.
1.4. Багаторівнева архітектура
Промислова мережа може бути підключена не тільки до одного комп'ютера, як показано на рис. 1.6, але і до мережі комп'ютерів, наприклад до локальної мережі Ethernet (рис. 1.7) або глобальній мережі «Інтернет».
Доступ будь-якого комп'ютера мережі до пристроїв вводу-виводу або контролерів здійснюється за допомогою ОРС-сервера (OPC - OLE for Process Control — сімейство програмних технологій, що надають єдиний інтерфейс для управління об'єктами автоматизації і технологічними процесами). OLE (англ. Object Linking and Embedding, вимовляється як oh-lay [олей]) — технологія скріплення і впровадження об'єктів в інші документи і об'єкти, розроблені корпорацією «Майкрософт».
ОРС-сервери можуть розташовуватися на декількох комп'ютерах або контролерах, і доступ до будь-якого з них може здійснюватися з будь-якого комп'ютера мережі. Приклад архітектури такої системи показаний на рис. 1.7.
Вона є достатньо загальною і широко використовується як для лабораторної автоматизації, так і для автоматизації технологічних процесів. Окремі промислові мережі можуть мати різні протоколи і містити устаткування різних виробників, а також різне фізичне середовище передачі даних — оптоволокно, мідні дроти, радіоефір (через радіо- або GSM-модеми) і ін. Зазвичай ОРС-сервер працює тільки з одним або декількома портами вводу-виводу комп'ютера, до кожного з яких підключена одна промислова мережа, тому кількість ОРС-серверів в системі менше або рівно кількості промислових мереж.
Основою програмного забезпечення, встановленого на комп'ютерах мережі, є SCADA-пакети — програмні засоби диспетчерського управління і збору даних. У контролерах виконуються завантажувальні модулі програм, що генеруються засобами візуального програмування ПЛК на мовах стандарту МЕК 61131-3.

Рис. 1.7. Типова сучасна розподілена система автоматизації, що включає три рівні ієрархії (див. також рис. 1.8)
Аналіз складних систем управління дозволяє виділити в них декілька однорідних рівнів ієрархії, показаних на рис. 1.8. Тут WAN (Wide Area Network) — глобальна мережа, LAN (Local Area Network) — локальна мережа.
Нижчий (нульовий) рівень включає датчики і виконавчі пристрої (актуатори): датчики температури, тиску, кінцеві вимикачі, дискретні датчики наявності напруги, вимірювальні трансформатори, реле-пускачі, контактори, електромагнітні клапани, електроприводи і ін.
Перший рівень складається з програмованих логічних контролерів і модулів аналого-цифрового і дискретного вводу-виводу, які обмінюються інформацією по промисловій мережі. Іноді модулі вводу-виводу виділяють в окремий рівень ієрархії.
Другий (диспетчерський) рівень складається з робочих станцій — комп'ютерів з людино-машинним інтерфейсом (ЧМІ, HMI — Human Machine Interface), найбільш поширеними варіантами якого є SCADA-пакети. Диспетчер (оператор) здійснює спостереження за ходом технологічного процесу або управління ним за допомогою мнемосхеми на екрані монітора комп'ютера. Важливою частиною другого рівня є також бази даних реального часу, що є сховищами інформації і засобом обміну з третім рівнем ієрархії системи управління.

Рис. 1.8. Рівні ієрархії сучасної АСУ ТП
Третій рівень (рівень управління цехом) з'являється як засіб інтеграції системи АСУ ТП з АСУП — автоматизованою системою управління підприємством. АСУП залежно від розмірів корпорації може включати ще вищий (четвертий) рівень і забезпечувати інтеграцію з вищим керівництвом, яке може бути розташоване в різних країнах і на різних континентах земної кулі. На рівні АСУП вирішуються наступні завдання:
• ERP (Enterprise Resource Planning) — планування ресурсів підприємства;
• MRP (Manufacturing Resource Planning) — планування ресурсів технологічних підрозділів підприємства;
• MES (Manufacturing Execution Systems) — управління виробничими ресурсами;
• HRM (Human Resource Management) — управління людськими ресурсами;
• ЕАМ (Enterprise Asset Management) — управління основними фондами, технічним обслуговуванням і ремонтами.
Кількість рівнів АСОВІ залежить від величини підприємства.
Лекція 2. Застосування Інтернет-технологій
2.1. Проблеми застосування Інтернет в системах управління і їх рішення.
2.2. Основні поняття технології Інтернету.
2.3. Принципи управління через Інтернет.
2.4. Мікро веб-сервери.
Коли частина компонентів системи автоматизації виходить за межі локальної мережі і переходить на рівень глобальної мережі WAN (Wide Spread Area Network) — технологія побудови мереж, яка забезпечує передачу інформації на значні відстані з використанням комутованих і виділених ліній, спеціальних каналів зв'язку і Інтернету), вартість каналів зв'язку різко зростає унаслідок високих тарифів на дальню телефонну комунікацію. У цих умовах вигідним виявляється застосування Інтернету. Вартість його на порядки нижче завдяки комутації пакетів, а не каналів, що дозволяє істотно поліпшити ефективність використання пропускної спроможності мережі зв'язку.
Другою істотною перевагою застосування Інтернет-технологій в АСУ ТП є можливість використання на комп'ютері диспетчера будь-якого веб- браузера (наприклад, Internet Explorer), незалежно від його виробника, типу апаратної платформи або операційної системи. Наприклад, комп'ютер диспетчера може працювати під Windows, Linux, Unix, QNX, Windows СЕ і ін.
Управління і моніторинг через Інтернет привабливі ще тим, що можуть здійснюватися з будь-якої точки земної кулі за допомогою комп'ютера або мобільного телефону (комунікатора). Така можливість особливо важлива для вищого керівництва, яке часто буває у відрядженнях, а також для корпорацій, що мають підрозділи в різних містах або країнах.
Іншими достоїнствами автоматизованих систем, що використовують Інтернет, є:
• зниження вартості функціонування АСУ ТП унаслідок видаленого управління (відсутня необхідність присутності людини на важко доступному об'єкті);
• зниження вартості обслуговування завдяки видаленій діагностиці, відладці і оновленню програмного забезпечення через Інтернет — зменшуються витрати на відрядження;
• можливість контролю стану виробничого або технологічного процесу або управління ним через мобільний телефон;
• можливість автоматичного виклику аварійної служби у разі спрацьовування датчиків газу, диму, полум'я, затоплення і пр.;
• широкий вибір готових (наявних в продажі) технічних рішень, апаратних і програмних продуктів для роботи з Інтернетом.
Цей же підхід може використовуватися і в Інтранеті (Інтранет — це локальна мережа, яка містить веб-сервер і працює по тих же протоколах, що і Інтернет).
2.1. Проблеми і їх рішення
При комутації пакетів, використовуваній в Інтернеті, необхідна проміжна буферизація даних, яка вносить до процесу доставки повідомлень затримку невизначеної величини, а при переповнюванні проміжних буферів можливі втрати даних. Інтернет має також низьку надійність зв'язку і погану захищеність від несанкціонованого доступу.
В даний час активно розробляються методи забезпечення якості обслуговування QOS (Quality of Service), покликані ослабити гостроту перерахованих проблем. Проте невизначеність часу доставки повідомлень і наявність затримки є основними недоліками зв'язку через Інтернет. Частковим вирішенням цієї проблеми в системах моніторингу є посилка даних разом з мітками часу. Синхронізувати мітки можна за допомогою системи GPS (Global Positioning System). Проте це не вирішує проблеми в завданнях з реальним часом, наприклад коли Інтернет-канал входить в контур зворотного зв'язку.
Існує достатньо багато областей, де вказані обмеження не є істотними. Крім того, в правильно спроектованій розподіленій системі управління інтенсивність інформаційного обміну між її компонентами спадає у міру видалення компонентів один від одного, досягаючи мінімуму для випадку видаленого обміну через Інтернет. Зворотні зв'язки в такій системі є тільки локальними, за винятком контуру управління з диспетчером, де час доставки повідомлень порівнянний з часом реакції людини.
Прикладом завдання управління, в якому не потрібний гарантований час доставки повідомлень, є дистанційне керування системами вентиляції, кондиціонування і обігріву будівель. У системі встановлюють датчики температури зовнішнього повітря, температури в кімнатах, датчики струму виконавчих пристроїв, датчики вологості, датчики світла, а також виконавчі пристрої для подачі електроенергії в будівлю, для включення/виключення вентиляторів, обігрівачів, кондиціонерів, осушувачів, зволожувачів, припливної вентиляції, вентиляції усередині приміщення.
Найбільш безпечним застосуванням Інтернету є системи моніторингу, наприклад публікація на веб-сторіночці інформації про параметри технологічного процесу, дії оператора, а також звідних звітів і графіків. Така Інтернет-система може бути повністю автономною, оскільки перераховані дані можуть бути узяті безпосередньо з бази даних АСУ ТП без дії на сам технологічний процес. Можливість роботи з базами даних підтримується всіма сучасними веб-серверами.
2.2. Основні поняття технології Інтернету
Основними компонентами Інтернету є веб-сервери і веб-клієнти (браузери). На жорсткому диску сервера може знаходитися безліч вебсайтів або FTP (File Transfer Protocol) каталогів з унікальними адресами URL (Universal Resource Locator). Дані між клієнтом і сервером передаються за допомогою протоколу HTTP (Hyper Text Transfer Protocol) або FTP. Маршрутизація (передача в потрібному напрямі) даних в Інтернеті здійснюється за допомогою 32-бітової адресації IP (Internet Protocol). Веб-сторінки створюються за допомогою мови розмітки документа HTML (Hyper Text Markup Language) або його розширеній версії XML (extensible Markup Language), а також WML (Wireless Markup Language), який використовується для мобільних телефонів, смартфонів, записників PDA (Personal Digital Assistant), що працюють з Інтернетом по протоколу WAP (Wireless Applications Protocol).
Зв'язок між клієнтами і серверами Інтернету виконується по телефонних каналах зв'язку, які можуть бути дротяними, оптоволоконними або радіо (зокрема стільниковими). Аналогові канали зв'язку зазвичай мають швидкість передачі інформації не більше 56 кбіт/с, тому використовують цифровий зв'язок ISDN (Integrated System Digital Network) із швидкістю передачі до 128 кбіт/с і DSL (Digital Subscriber Lines) із швидкістю передачі до 8 Мбіт/с. Різновидами DSL є асиметричний цифровий канал ADSL (Asymmetric DSL), в якому дані в одному напрямі (абонентові) передаються з швидкістю до 8 Мбіт/с, а у зворотному напрямі — до 1 Мбіт/с. Іншими модифікаціями DSL є ADSL2+, SHDSL, RDSL, VDSL, що надають різні можливості абонентам. Загальним позначенням різних модифікацій DSL каналів є xDSL.
Безпровідний доступ в Інтернет можна забезпечити за допомогою стільникових модемів GSM (Global System for Mobile communications), безпровідного Ethernet, званого ще WLAN (Wireless LAN), або Wi-Fi (Wireless Fidelity), устаткування Bluetooth, ZigBee, WiMax, інфрачервоного порту комп'ютера або супутникового зв'язку.
Супутниковий Інтернет забезпечує односторонній зв'язок (прийом інформації від супутника) з дуже високою швидкістю (до 48 Мбіт/с). При цьому передача інформації забезпечується будь-якими іншими видами зв'язку.
Доступ по каналах стільникового зв'язку виконується за допомогою системи пакетної передачі даних GPRS (General Packet Radio Service). Система GPRS забезпечує швидкість передачі в середньому близько 20 кбіт/с (теоретична межа складає 171,2 кбіт/с) і оптимально пристосована для переривистого трафіку, характерного для мереж Інтернет/Інтранет. Вона забезпечує пакетну комутацію на всьому протязі каналу зв'язку, істотно знижуючи вартість зв'язку в мережах стандарту GSM. З'єднання в системі GPRS встановлюється практично миттєво, і вона підтримує всі найпоширеніші мережеві протоколи передачі даних, зокрема Інтернет-протокол IP. Важливою перевагою GPRS в порівнянні з голосовими каналами стільникового зв'язку є те, що плата береться за не час з'єднання, а за об'єм переданої інформації. У стільникових телефонах основною сферою застосування GPRS є проглядання WAP-сторінок. Також можливе відсилання SMS (Short Message Service) через мережу GPRS. При підключенні GSM модему в режимі GPRS до комп'ютера можна виходити в Інтернет, при цьому Інтернет-провайдером є оператор стільникового зв'язку.
Удосконаленням GPRS є система EDGE (Enhanced Data rates for Global Evolution), що дозволяє забезпечити передачу даних з швидкістю до 474 кбіт/с. Реально досяжна середня швидкість передачі даних складає 100... 120 кбіт/с, з піковими значеннями до 230 кбіт/с.
2.3. Принципи управління через Інтернет
Існує два різні способи управління через інтернет, на основі яких побудований ряд комерційних продуктів: спосіб видаленого терміналу і спосіб ділення SCADA-пакета на серверну і клієнтську частини.
Видалений термінал можна уявити собі як подовження проводів миші, клавіатури і монітора за допомогою Інтернету, при цьому візуалізація виконується у вікні веб-браузера, а на комп'ютер через Інтернет передаються тільки сигнали від миші і клавіатури. Керована програма виконується на віддаленому від користувача комп'ютері, на якому встановлюється спеціалізований веб-сервер. Прямо з веб-браузера можна працювати із запущеними на веб-сервері програмами, з файловою системою і реєстром сервера, запускати програми, контролювати додатки, що виконуються, і служби, встановлювати права доступу до системи, отримувати інформацію про завантаження процесора і оперативної пам'яті.
Прикладами таких програм можуть служити пакети Remotely Any where фірми 3am Labs (www.remotelyanywhere.com), GoToMyPC (www.gotomypc.com) і Spy Anywhere (www.spyanywhere.com).
Видалений термінал можна використовувати для управління будь-якою програмою, зокрема SCADA. Його недоліком є вимога великої пропускної спроможності Інтернет-каналу, оскільки через Інтернет передається вся інформація, що відображається на екрані видаленого комп'ютера.
Другий спосіб видаленого управління через Інтернет заснований на діленні SCADA-пакета на серверну і клієнтську частини. Клієнтська частина є веб-браузером, який проглядає спеціалізовану веб-сторінку, що знаходиться на веб-сервері. На цій сторінці створюється спеціалізований інтерфейс з графікою і анімацією. Анімація виконується за допомогою JScript, VBScript, Java-апплетів, Flash і анімованих GIF-файлов. Оскільки основна частина візуальної динаміки призначеного для користувача інтерфейсу виконується на клієнтському комп'ютері, а з сервера передаються тільки дані про об'єкт автоматизації, істотно знижуються вимоги до пропускної спроможності Інтернет-каналу.
JavaScript або VBScript застосовуються в таких системах для створення динамічних веб-сторінок (з лопатями вентиляторів, що обертаються, з рухом рідини в трубах і тому подібне), для оперативної перевірки правильності дій користувача при заповненні форм до передачі сторінки на сервер, для взаємодії з користувачем при вирішенні таких завдань, які не вимагають звернення до сервера.
Веб-сторінка може сприймати дії користувача, наприклад, натиснення кнопок, заповнення форм, і передавати їх серверу. Сервер у відповідь формує нову веб-сторінку з елементами, зміненими відповідно до дій користувача. Виконується це за допомогою CGI-сценария (Common Gateway Interface), який пишеться зазвичай на мові Perl і розташовується на сервері. Назва «сценарій» або «скрипт» пов'язана з тим, що програма не транслюється у виконуваний код, а виконується безпосередньо, за допомогою інтерпретатора мови. Мова Perl використовується тільки на серверах, що працюють під операційною системою Unix, тому програмістам, що працюють з Windows, він зазвичай незнайомий.
Для середовища Windows фірма Microsoft запропонувала технологію ASP.NET (Active Server Pages), яка дозволяє створювати веб-сторінки, що знаходяться на сервері і містять код сценаріїв VBScript. Результати виконання сценаріїв VBScript передаються від сервера клієнтові. Технологію можна використовувати на Internet Information Server (IIS), який працює під управлінням Microsoft Windows Server.
Відзначимо, що JScript і VBScript, ACTIVEX, Flash і анімовані GIF виконуються тільки на стороні клієнта без взаємодії з сервером, тоді як CGI і ASP.NET виконуються на стороні веб-сервера і саме вони витягують дані з ОРС сервера або бази даних SCADA-системи, щоб відіслати їх клієнтові.
Дані між клієнтом і сервером можуть пересилатися у вигляді повідомлень SOAP (Simple Object Access Protocol), які використовують транспортний протокол HTTP. Повідомлення SOAP використовують гнучку граматику мови XML. SOAP активізує два процеси, які можуть знаходитися на різних комп'ютерах, але взаємодіють один з одним незалежно від програмних і апаратних платформ, на яких вони реалізовані.
Взаємодія між клієнтською і серверною частиною SCADА (рис. 2.1) виглядає таким чином.
Коли користувач хоче отримати дані від контролера через Інтернет, він натискає деяку командну кнопку у вікні веб-браузера. Цей запит посилається серверу через Інтернет у форматі SOAP-повідомленнґ. Коли веб-сервер отримує SOAP-повідомлення через ТСР-порт 80, запит прямує до обробника скрипту, який також розташовується на веб-сервері. Веб-сервіс (Web service) створює запрошувані дані або передає управління програмі (наприклад, на мові VB.NET), яка спілкується з контролером через ОРС-сервер. Отримані таким чином дані викладаються на веб-сторінку, яку бачить користувач за допомогою веб-браузера. При вході на веб-сервер операційна система (Windows або Linux) проводить ідентифікацію користувача і надає доступ до інформації відповідно до його прав.
У разі видаленого управління на основі WAP користувач дістає доступ до керованої системи через мобільний телефон (GSM-модем). WAP підтримується стандартами GSM, TDMA, CDMA, GPRS.

Рис. 2.1. Архітектура автоматизованої системи, що використовує Інтернет
Лекція 3. Відкриті системи
3.1. Поняття відкритої системи.
3.2. Властивості відкритих систем.
3.3. Засоби досягнення відкритості.
3.4. Достоїнства і недоліки відкритих систем.
3.1. Поняття відкритої системи
Відкритою називається модульна система, яка допускає заміну будь-якого модуля на аналогічний модуль іншого виробника, наявний у вільному продажі по конкурентоздатних цінах, а інтеграція системи з іншими системами (зокрема з користувачем) виконується без подолання надмірних проблем.
Відкритість можна розглядати на різних рівнях ієрархії програмного і апаратного забезпечення системи або її складових частин. Відкритими, наприклад, можуть бути:
• фізичні інтерфейси, протоколи обміну, методи контролю помилок, системи адресації, формати даних, типи організації мережі, інтерфейси між програмами, діапазони зміни аналогових сигналів;
• призначені для користувача інтерфейси, мови програмування контролерів, команди модулів вводу-виводу, що управляють, мови управління базами даних, операційні системи, засоби зв'язку апаратури з програмним забезпеченням;
• конструкційні елементи (шафи, стійкі, корпуси, роз'єми, кріпильні елементи);
• системи, що включають перераховані вище елементи.
Під відкритістю системи іноді розуміють її відповідність сучасним промисловим стандартам, яке забезпечує можливість інтеграції з іншими відкритими системами.
Як випливає з визначення, необхідними умовами відкритості є:
• модульність;
• відповідність стандартам (необов'язково офіційним, але обов'язково загальноприйнятим і легко доступним за ціною, компенсуючої тільки витрати на його розробку, підтримку і розповсюдження);
• наявність у вільному продажі аналогічних систем інших виробників (підсистем, модулів) по конкурентоздатних цінах.
Поняття відкритості достатньо багатогранно і не стандартизовано. Тому практично можна говорити тільки про ступінь відкритості системи, указуючи, що саме розуміється під відкритістю у кожному конкретному випадку. Ступінь відкритості можна оцінити кількістю реалізованих ознак відкритості.
Для SCADA-системи ознаками відкритості є сумісність із стандартом ОРС, сумісність з широко доступними комп'ютерами з різними операційними системами (бажано), сумісність з ACTIVEX, СОМ і DLL компонентами інших виробників, підтримка мов стандарту МЕК 61131-3, наявність вбудованої стандартної алгоритмічної мови (наприклад, Visual Basic) для реалізації функцій, які неможливо реалізувати іншими засобами SCADA-пакета, можливість роботи як з малим, так і великою кількістю тегів без необхідності перенавчання обслуговуючого персоналу, можливість застосування веб-браузера як призначеного для користувача інтерфейса для збільшення кількості робочих станцій, що підключаються, наявність призначеного для користувача інтерфейсу, аналогічного інтерфейсам інших виробників, сумісність із стандартними базами даних і іншими додатками (наприклад, Microsoft Office), розташованими на будь-яких комп'ютерах мережі.
Для промислових мереж відкритість означає наявність у вільному продажі мережевої апаратури від різних виробників по конкурентоздатних цінах, сумісною з відкритими стандартами.
Ідеальним прикладом відкритої системи є сучасний офісний комп'ютер.
Поняття відкритості не має на увазі відкритість програмного коду, як, наприклад, в ОС Linux, хоча відкритість коду дозволяє додавати в систему модулі інших виробників, що є ознакою відкритості. Проте відкритість початкового коду істотно знижує надійність системи унаслідок потенційної можливості появи в ній додаткових помилок, внесених під час модифікації і компіляції. Тому відкритість програмного коду є спірною ознакою відкритості системи.
На відміну від відкритих, закриті системи розробляються по внутрішніх стандартах окремих підприємств. Частини (модулі) закритих систем не можуть бути замінені аналогічними виробами інших виробників, а замовник, одного разу застосувавши закриту систему, назавжди виявляється прив'язаним до її розробника.
3.2. Властивості відкритих систем
Відкриті системи володіють наступними позитивними властивостями, завдяки яким системні інтегратори виявляють до них велику цікавість:
• модульність;
• платформенна незалежність;
• взаємозамінюваність з компонентами інших виробників;
• інтероперабельність (можливість спільної роботи) з компонентами інших виробників;
• масштабованість.
Відзначимо, що закриті системи теж можуть бути модульними, інтероперабельними, масштабованими. Відмінність відкритих систем полягає в тому, що всі перераховані властивості повинні виконуватися для компонентів, виготовлених різними виробниками і наявних у вільному продажі.
До систем з відкритою архітектурою пред'являють також загальноприйняті вимоги: економічності, безпеки, надійності, грубості (робастності), простоти обслуговування і відповідності умовам експлуатації, здібності до самодіагностики і наявності рекомендацій по ремонту. Система повинна забезпечувати максимальний час роботи без збою і відмови, а також мінімальний час, необхідний для виконання технічного обслуговування або ремонту.
Модульність — це здібність апаратного або програмного забезпечення до модифікації шляхом додавання, видалення або заміни окремих модулів (компонентів системи) без дії на її частину, що залишилася.
Модульність забезпечується при проектуванні системи на архітектурному рівні. Базою для побудови модульного програмного забезпечення є об'єктно-орієнтоване програмування. Головним досягненням у напрямі розвитку модульності програмного забезпечення АСУ ТП є виділення в ньому незалежних підсистем: програми в ПЛК, ОРС сервера, баз даних, операторського інтерфейсу і алгоритмічної частини, що реалізовується на мовах стандарту IEC 61131-3, а також ділення SCADA на серверну і клієнтську частини.
Платформенна незалежність. Можливість виконання програм на різних апаратно-програмних платформах забезпечує незалежність від постачальника цих платформ і дає наступні переваги:
• розширення вибору устаткування шляхом збільшення числа постачальників;
• незалежність від постачальника апаратного і програмного забезпечення. Відсутність цих властивостей приводить до того, що система, залежна від одного виробника, припиняє свій розвиток у випадках, коли фірма-виробник раптово йде з ринку, збільшує вартість продукту або знімає його з виробництва.
Застосування ОС Windows є одним з шляхів підвищення відкритості систем, оскільки ця операційна система може бути встановлена на максимальне число типів вироблюваних комп'ютерів. В даному випадку монополія фірми Microsoft компенсується її розмірами і стабільністю.
Платформенну незалежність програмних засобів і, як наслідок, підвищення відкритості забезпечує також мова Java, хоча вона і поступається C++ по швидкодії додатків.
Для поліпшення відкритості при компіляції виконуваних модулів програм важливо уникати «поліпшень» компілятора, застосування плагінів, надбудов, викачаних «звідкись з Інтернету», оскільки вони можуть зробити неможливим виконання програми на інших платформах.
Важливим кроком на шляху забезпечення платформенної незалежності з'явилося застосування Інтранет-технологій в автоматизації, коли передача інформації до робочої станції здійснюється за допомогою мови xml, а її представлення користувачеві виконується за допомогою будь-якого веб-браузера. Веб-браузер дозволяє в якості робочої станції АСУ ТП використовувати комп'ютер і операційну систему будь-якого виробника з наявних у вільному продажі.
Платформенною незалежністю володіє також база даних з мовою запитів SQL (Structured Query Language), якщо виключити з нього по можливості всі нестандартні розширення. Доступ до бази даних за допомогою SQL здійснимо незалежно від програмно-апаратної платформи, на якій вона знаходяться.
Взаємозамінюваність — це можливість заміни будь-якого модуля (компоненту) системи на аналогічний компонент іншого виробника, наявний у вільному продажі, і можливість зворотної заміни. Ця властивість дозволяє прискорити заміну модуля, що відмовив, поліпшити якість вже працюючої системи, виключити цінову залежність від постачальника.
Інтероперабельність — це здатність відкритих систем використовувати програми, що виконуються одночасно на різних платформах в загальній мережі, з можливістю обміну інформацією між ними. Інакше кажучи, програмні компоненти системи, розташовані на різних апаратних платформах в загальній мережі, повинні бути здатні працювати як частина єдиної системи.
Інтероперабельність важко досяжна, але вона забезпечує можливість вибирання апаратних і програмних засобів з величезної різноманітності, представленої на ринку, замість обмеженого вибору компонентів монопольного виробника закритої системи.
Відкрита інтероперабельна система повинна володіти здатністю комунікації і з іншими рівнями АСУ підприємства, забезпечуючи одночасно безпеку інформації, що поступає ззовні.
Одним з методів забезпечення інтероперабельності Windows і Unix платформ може бути застосування стандарту CORBA (Common Object Request Broker Architecture).
Масштабованість — це можливість застосування одного і того ж апаратного і програмного забезпечення (баз даних, призначених для користувача інтерфейсів, засобів комунікації) для систем різного розміру (великих і малих). Для забезпечення масштабованості досить, щоб програмне забезпечення великих і малих систем було сумісне по операторському інтерфейсу, мовам програмування, а також інтерфейсу з апаратними засобами і не вимагало додаткового навчання персоналу. Масштабована система повинна забезпечувати можливість простого нарощування функціональних можливостей і розмірів шляхом включення нових компонентів як в апаратну, так і програмну частину системи без модифікації старих, випробуваних програмних і апаратних модулів.
Масштабованість дозволяє застосовувати одні і ті ж апаратні і програмні засоби як для великих, так і для малих систем в межах однієї організації. Прикладом масштабованих програмних систем є сучасні SCADA-пакети TraceMode і MASTERSCADA, які продаються як єдиний пакет, але що має градації залежно від кількості тегів.
До появи відкритих систем забезпечення масштабованості досягалося шляхом проектування системи з великим запасом по габаритах, кількості слотів, інтерфейсів. Наращуваність відкритої системи має на увазі інший шлях, що не вимагає запасу ресурсів (і пов'язаних з ним надмірних фінансових вкладень). Зокрема, система, що володіє властивістю платформенної незалежності і інтероперабельності, вже є розширюваною, оскільки вона дозволяє додавати нове устаткування або замінювати старе новими модифікаціями, зокрема устаткуванням інших виробників.
Стандартність призначеного для користувача інтерфейсу. Відкриті системи повинні мати стандартний призначений для користувача інтерфейс, щоб виконати вимогу про можливість інтеграції з іншими системами (в даному випадку під «іншою системою» розуміється людина). Стандартизація призначеного для користувача інтерфейсу знімає необхідність навчання операторів при переході від однієї відкритої системи до іншої.
3.3. Засоби досягнення відкритості
Для забезпечення можливості побудови відкритих систем ринок повинен бути наповнений програмними і апаратними засобами, які є взаємозамінними, проводяться незалежними підприємствами і задовольняють вимогам загальноприйнятих стандартів. Нижче ми стисло опишемо такі продукти.
Промислові мережі і протоколи. Найбільш поширеними в Росії є мережі Modbus, Profibus, CAN, Ethernet. Устаткування, сумісне з ними, випускається сотнями конкуруючих підприємств в різних країнах світу, що забезпечує відсутність монопольних цін.
Інтерфейси. Найбільша частина коштів промислової автоматизації, представлених на російському ринку, має інтерфейси RS-232, RS-485, RS-422, CAN, Ethernet, USB. Велике значення для підвищення ступеня відкритості мають перетворювачі інтерфейсів і міжмережеві шлюзи, які дозволяють об'єднувати в єдину систему несумісне по інтерфейсах і протоколах устаткування.
Програмні інтерфейси. Для взаємодії відкритих систем на програмному рівні найбільшого поширення набула DCOM-технологія фірми Microsoft, що стала промисловим стандартом ОРС (OLE for Process Control), який прийшов на зміну застарілої технології DDE (Dynamic Data Exchange). Стандарт ОРС забезпечив можливість застосування устаткування різних виробників практично з будь-якими SCADA, що є на ринку, оскільки більшість з них підтримує стандарт ОРС.
Аналогічне завдання може бути вирішена також за допомогою технології Jini фірми SUN і CORBA фірми OMG, проте втілення в міжнародний стандарт ОРС отримала тільки технологія DCOM, орієнтована на Windows-платформи.
Інтерфейс користувача. Інтерфейс між SCADA і користувачем в даний момент виконується приблизно одними і тими ж візуальними засобами, які стали стандартом де-факто: кнопки пуск/стоп, цифрове табло, лінійний або радіальний індикатор рівня, колірна сигналізація, вікна з текстовими повідомленнями, вікна введення даних, графіки і тому подібне Такий інтерфейс легко засвоюється операторами АСОВІ ТП.
Програмування контролерів підтримується трьома міжнародними стандартами: стандартом МЕК 61131-3 на мови програмування і стандартами МЕК 61499 і МЕК 61804 на функціональні блоки. Стандарти підтримуються більшістю виробників програмного забезпечення.
Останніми роками з'явилися багато SCADA-систем, які підтримують веб-технологію, коли призначений для користувача інтерфейс SCADA виконується у вигляді веб-сторінки і розташовується на сервері локальної мережі. При цьому будь-який користувач, що володіє достатніми правами доступу, за допомогою стандартного веб-браузера (наприклад, Internet Explorer) може управляти технологічним процесом. Такий підхід є значним прогресом у напрямі відвертості SCADA-пакетів, оскільки надає користувачеві широкий вибір добре валідованих веб-браузерів за достатньо низькою ціною і забезпечує застосування практично будь-якої апаратно-програмної платформи для спілкування з SCADA.
Програмна сумісність. Важливою гідністю SCADA-пакетів, що підвищує ступінь їх відкритості, є зв'язок з програмами Microsoft Office (Word, Excel, Access), яка знижує витрати на навчання персоналу і розширює можливості уявлення і обробки результатів вимірювань.
Сумісність баз даних з SCADA забезпечує широко поширену мову запитів SQL, відповідну міжнародному стандарту і підтримувану декількома СУБД (системами управління базами даних), наприклад Informix, Sybase, Ingres, MS SQL Server. Інтерфейс ODBC (Open Data Base Connectivity) дозволяє підключати до однієї і тієї ж SCADA різні СУБД, що підвищує ступінь її відвертості.
Забезпечення в деяких SCADA-пакетах можливості програмування на мові Visual Basic, а також можливість вбудовування ACTIVEX і СОМ об'єктів сторонніх виробників дозволяє адаптувати SCADA до апаратури, що не підтримує стандарт ОРС, а також застосувати принцип повторного використання програмного коду, написаного для інших додатків.
3.4. Переваги і недоліки
Основною перевагою систем з відкритою архітектурою є низька вартість їх життєвого циклу. Життєвий цикл АСУ ТП складається з наступних фаз:
• розробка концепції і ескізне проектування;
• проектування і виготовлення системи;
• монтаж і пуск-наладка;
• експлуатація системи;
• обслуговування;
• реконфігурація, модернізація, розбирання, утилізація.
Вигодою від застосування відкритих систем є:
• знижені вкладення на проектування системи і передпроектні дослідження завдяки наявності на ринку великого вибору готових компонентів відкритих систем. Особливо великий економічний ефект досягається при створенні крупних систем в одиничних екземплярах. В цьому випадку економія пропорційна розміру системи;
• спрощення процесу інтеграції — відкритість має на увазі можливість простій інтеграції різнорідних систем;
• економія фінансових коштів завдяки низькій вартості життєвого циклу (в основному внаслідок конкуренції незалежних виробників і відсутності диктату цін монопольним постачальником);
• збільшений час безвідмовної роботи завдяки вибору найбільш надійних модулів з тих, що є на ринку;
• мінімізований час вимушеного простою завдяки великому вибору взаємозамінних модулів завжди можна знайти постачальника, що має потрібні модулі на складі;
• мінімальні зусилля на введення в дію як апаратури, так і програмного забезпечення завдяки усуненню часу на додаткове навчання як монтажної організації, так і експлуатуючого персоналу;
• проста зміна конфігурації системи для роботи з новими технологічними процесами — витікає з властивостей модульності і розширюваності відкритих систем;
• мінімальний об'єм додаткового навчання персоналу і, як наслідок, простота обслуговування;
• застосування новітніх технологій і технічних рішень завдяки широкому вибору якнайкращих рішень і спеціалізації виробників;
• збільшення часу життя системи завдяки взаємозамінюваності відпрацьованого ресурсу і нового устаткування, а також можливості нарощування функціональних можливостей.
Недоліки відкритих систем видно не відразу. Та все ж вони є:
• при створенні автоматизованої системи на базі відкритих рішень відповідальність за працездатність системи в цілому лягає на системного інтегратора, а не на виробника системи. Тому при появі в системі невідтворних відмов нікому пред'явити претензії, оскільки постачальників багато, а системний інтегратор відповідає тільки за монтаж і пуск-наладку системи;
• універсальність завжди знаходиться в суперечності з простотою. Універсальні протоколи, інтерфейси, мережі і програмне забезпечення, щоб бути універсальними, повинні бути достатньо складними, отже, дорогими і ненадійними. Хоча зниження надійності, викликане складністю, компенсується підвищенням надійності завдяки великому тиражу і, отже, продовженням відладки після початку продажів;
• ефект зниження надійності програмного забезпечення, частини якого пишуться різними виробниками. Коли ПО пишеться усередині однієї фірми, можна передбачати майже всі ситуації, які можуть виникнути на межі між ПО і користувачем або апаратурою. Якщо ж в цьому беруть участь декілька різних команд в різних фірмах, між якими немає взаємодії, то стає незрозуміло, хто відповідає за надійність всього комплексу. Крім того, із зростанням числа програмістів, що беруть участь в створенні ПО, по законах статистики збільшується вірогідність того, що з'явиться хоч би один програміст, що не уміє писати надійні програми. А цього досить, щоб зробити всю систему ненадійною. Надійність і безпека відкритих систем залишаються темами, що вимагають рішення;
• іноді до ознак відкритості відносять відкритість початкових кодів. Проте наявність відкритих кодів знижує надійність програмної системи, оскільки порушується принцип інкапсуляції, необхідність якого обґрунтована в ідеології об'єктно-орієнтованого програмування;