пределение и структура электропривода вместе с описанием.
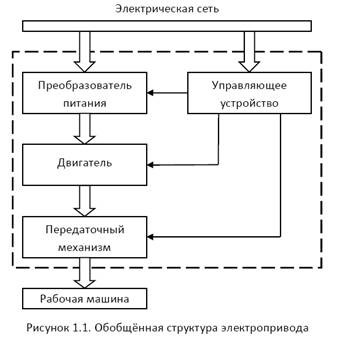
Электропривод – это электромеханическая система, предназначенная для обеспечения движения рабочей машины или технологических устройств, состоящая из электродвигателя, передаточного механизма, преобразователя питания и управляющего устройства.
2. Преимущества ЭП. Составные элементы ЭП. Уравнение механической мощности при вращательном движении.
Преимущества:
1) экономия
2) большой диапазон мощностей и скоростей
3) многообразие конструкций
4) простота автоматизации технических процессов
5) экологическая частота
Составные элементы:
1) электродвигатель
2) передаточного механизма
3) преобразователя питания
4) управляющего устройства.

T - вращающий момент и w -угловая скорость.
производная от работы и производная от времени
3. Основная задача ЭП. Диаграммы направлений потоков мощности. Уравнение механической мощности при прямолинейном движении.
Задачей электропривода является обеспечение движения рабочего органа рабочей машины в соответствии с требованиями технологического процесса

P=Fv
F - сила и v -скорость прямолинейного движения.
4. Примеры передаточных механизмов. Какие преобразования возможны в ПМ.
(редукторы, зубчатые и ременные передачи, лебёдка с тросом, кривошипные механизмы и др.)
Передаточный механизм преобразовывает механическую энергию. Благодаря нему может
увеличиться или уменьшиться скорость и измениться характер движения. Например,
вращательное движение может превратиться в прямолинейное и т.д.
5. Условие стабильной работы. Определение переходных процессов и причины возникновения.
для стабильной работы необходимо, чтобы жёсткость характеристики в рабочей точке двигателя была меньше жёсткости статической характеристики нагрузки: b < b s
Режим работы электропривода при переходе от одного установившегося состояния к другому, с другими значениями момента, частоты вращения, тока и других параметров называют переходным режимом. Явления, возникающие при переходных режимах, называют переходными процессами.
Причины: пуск двигателя, его остановка, торможение, реверсирование, регулирование частоты вращения, скачок сетевого напряжения и частоты.
6. Вывести основное уравнение движения ЭП при вращательном движении. Обоснование важности исследования переходных процессов.

Tm - момент двигателя,
Ts - статический момент нагрузки,
Td - динамический момент
J - момент инерции,
производная от времени,
производная от угловой скорости,
a - коэффициент нагрузки
7. Что такое статический, динамический момент и момент двигателя? Какое допущение совершаются при упрощении основного уравнения движения? Упрощённая форма основного уравнения движения при прямолинейном движении.
- Статический момент - момент противодействия, обусловленный рабочей машиной (Ts).
- Динамический момент – необходимый для преодоления момента инерции при изменении скорости вращения двигателя (Td).
- Момент двигателя – (Tm).
Уже в самом начальном виде основного выражения мы сделали допущение, что момент (сила) двигателя позитивен, т.к. он содействует движению, что означает, направлен в сторону движения.

Fm- двигающая (моторная) сила
Fs -сила сопротивления
m- масса
производная от времени
производная от скорости
v -скорость прямолинейного движения
s -пройденный путь