Принцип действия и устройство акселерометра
Принцип действия и устройство датчика измерения ускорения рассмотрим на примере пружинного акселерометра, в качестве чувствительного элемента которого применяется инерционная масса.
Принцип действия пружинного акселерометра с инерционным чувствительных элементов основан на использовании инерционных сил или моментов, возникающих при движении тела определенной массы с ускорением. Зависимость инерционной силы F, действующей на тело, масса которой равна m при наличии ускоренияa, как известно, определяют по второму закону Ньютона:
F = m·a
Датчики с инерционными чувствительными элементами применяют также для измерения вибрации, угловой скорости вращения и т.д.
Устройство акселерометра.
Чувствительным элементом акселерометра служит инерционная масса 1, подвешенная на двух пружинах 2, прикрепленных в точках А и В к корпусу 3, жестко связанному с движущимся объектом.
Линия АВ является осью чувствительности акселерометра. Она параллельна той оси движущегося объекта, по которой нужно измерить ускорение х.

При отсутствии ускорений натяжение пружин одинаково и масса располагается в среднем (нейтральном) положении. Если объект движется с постоянным линейным ускорением х, то масса перемещается на некоторую величину, при которой инерционная сила Рин, возникающая вследствие ускоренного движения массы в абсолютном пространстве, уравновешивается силой Рупр упругости пружин.
Для успокоения колебаний инерционной массы в переходном режиме служит демпфер 4, создающий силу, пропорциональную скорости перемещения массы относительно корпуса 3. Применяют магнитоиндукционные, жидкостные или воздушные демпферы.
Требования к акселерометрам в отношении точности измерения определяются областью применения. Так, погрешности акселерометров в инерциальных системах не должны превышать 0,001%.Акселерометры, используемые в системах управления, имеют погрешности на два-три порядка выше. Погрешности акселерометров, применяемых в качестве визуальных приборов, составляют 1÷3%.
Еще одной областью применения акселерометров является их применение в качестве датчиков измерения перегрузки, действующей на самолет в определенном направлении.
Перегрузкой называется отношение поверхностной силы F, действующей в направлении какой-либо оси самолета, к силе веса G.К поверхностным силам относятся подъемная сила, сила сопротивления и сила тяги. Различают перегрузку нормальную (поперечную), равную отношению подъемной силы к силе веса, продольную и боковую.
Перегрузка – величина безразмерная. Иногда говорят, что перегрузка равна, например, 5g. Это означает, что в данном направлении на летательный аппарат и находящихся в нем членов экипажа действует сила, в пять раз превышающая силу веса. Исходя из определения понятия перегрузки, следует говорить о перегрузке, равной 5, а не 5g.
Наибольшее значение для пилотирования ВС играет вертикальная перегрузка.
Сигналы акселерометров используются также в инерциальных навигационных системах для вычисления скоростей и координат, в системах управления полетом и двигателями, а также для индикации текущего и критического значений перегрузки.
Акселерометры, применяемые в системах управления, ориентируются своими осями чувствительности по главным осям лета тельного аппарата. Такие акселерометры измеряют составляющие вектора ускорения по этим осям, а для получения полного вектора необходимо иметь три акселерометра.
В инерциальных системах навигации оси чувствительности акселерометров ориентируются по осям навигационной системы координат, обычно связанной с Землей. В качестве навигационной системы координат может быть взята, например, географическая система, одна из осей которой направлена по меридиану, а вторая ось перпендикулярна к первой в горизонтальной плоскости. При этом два акселерометра с взаимно перпендикулярными осями, расположенными в горизонтальной плоскости, измеряют горизонтальные составляющие вектора ускорения, а один акселерометр, ось чувствительности которого направлена по вертикали, измеряет вертикальное ускорение.
Основными элементами акселерометров являются подвесы инерционных масс (чувствительных элементов), датчики сигналов перемещения массы, моментные (силовые) устройства, обеспечивающие ввод сигналов обратной связи, усилители сигналов и корректирующие устройства (демпферы).
Для того чтобы акселерометр реагировал только на ту составляющую ускорения, для измерения которой он предназначен, его инерционная масса должна иметь специальный подвес, удовлетворяющий следующим требованиям:
- минимальное трение в осях подвеса;
- отсутствие перекрестных связей между измерительными осями;
- обеспечение линейной зависимости между отклонениями инерционной массы и измеряемым ускорением.
Подвесы на простых опорах создают значительное трение, которое снижает чувствительность акселерометра. Для уменьшения трения чувствительный элемент укрепляют на рычаге или помещают в жидкость с удельным весом, равным удельному весу чувствительного элемента.
Перспективными являются электромагнитные и криогенные подвесы.
Для преобразования перемещений в электрические сигналы в акселерометрах применяются потенциометрические, индуктивные, емкостные, фотоэлектрическиеиструнные преобразователи.
Основные требования к преобразователям следующие:
1) большая разрешающая способность;
2) линейная зависимость выхода от входа;
3) отсутствие реакции преобразователя на чувствительный элемент.
Этим требованиям не удовлетворяют потенциометрические датчики, поэтому в точных приборах они не применяются.
В качестве моментных (силовых) устройств в акселерометрах для ввода сигналов обратных связей применяются моментные двигатели (электродвигатели, работающие в заторможенном режиме) и электромагнитные устройства.
Для получения акселерометров с требуемыми частотными характеристиками в цепях обратной связи применяют корректирующие фильтры и специальные демпферы. В приборах с жидкостным подвесом для демпфирования используется вязкость самой жидкости.
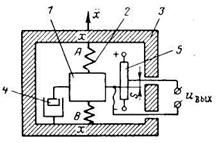
В качестве примера рассмотрим однокомпонентный акселерометр.
На схеме рис. 11.2 сейсмическая масса 1 подвешена на направляющей 4. Для уменьшения трения о направляющую масса 1, помещенная в жидкость 3, имеет нейтральную плавучесть, что исключает сильное прижатие к направляющей. Сигналы в рассматриваемой схеме, пропорциональные перемещению сейсмической массы, измеряются индуктивным датчиком 6. После усиления в усилителе 5 сигнал поступает на электромагнитный (силовой) привод 7. Выходным сигналом акселерометра является падение напряжения и на сопротивлении R, включенном последовательно в цепь обмотки силового привода. Демпфирование в приборе получается за счет сопротивления при движении сейсмической массы в жидкости.

Рис. 11.2. Схема однокомпонентного акселерометра:
1 – инерционная масса; 2 – корпус; 3 –жидкость; 4 – направляющий стержень; 5 – усилитель; 6– индуктивный датчик перемещения; 7 – электромагнитный привод
В акселерометрах рассматриваемого типа можно получить высокую собственную частоту и малую зону нечувствительности. Последнее достигается уменьшением сил трения за счет взвешивания инерционной массы в жидкости. Для сохранения постоянства характеристик акселерометра необходимо поддерживать температуру жидкости постоянной, что достигается термостатированием.