Микросхемы SDRAM: Логическая организация
Оперативная память ПК
Введение
Мы рассмотрим основные современные виды оперативной памяти, применяемой в десктопных системах. Под ними будем подразумевать память класса SDRAM – SDR (Single Data Rate – память с одинарной скоростью передачи данных), DDR (Double Data Rate – память с удвоенной скоростью передачи данных) и DDR2 (память DDR второго поколения). Возможно, SDRAM «как таковая» (в ее первоначальном варианте SDR SDRAM) на сегодня уже не является столь актуальным видом памяти, тем не менее, все три перечисленных вида принадлежат одному и тому же классу и базируются примерно на одних и тех же принципах функционирования, которые мы и рассмотрим прямо сейчас.
Теоретические основы современной оперативной памяти
SDRAM: Определение
Аббревиатура SDRAM расшифровывается как Synchronous Dynamic Random Access Memory – синхронная динамическая память с произвольным доступом. Остановимся подробнее на каждом из этих определений. Под «синхронностью» обычно понимается строгая привязка управляющих сигналов и временных диаграмм функционирования памяти к частоте системной шины. Вообще говоря, в настоящее время изначальный смысл понятия синхронности становится несколько условным. Во-первых, частота шины памяти может отличаться от частоты системной шины (в качестве примера можно привести уже сравнительно давно существующий «асинхронный» режим работы памяти DDR SDRAM на платформах AMD K7 с чипсетами VIA KT333/400, в которых частоты системной шины процессора и шины памяти могут соотноситься как 133/166 или 166/200 МГц). Во-вторых, ныне существуют системы, в которых само понятие «системной шины» становится условным – речь идет о платформах класса AMD Athlon 64 с интегрированным в процессор контроллером памяти. Частота «системной шины» (под которой в данном случае понимается не шина HyperTransport для обмена данными с периферией, а непосредственно «шина» тактового генератора) в этих платформах является лишь опорной частотой, которую процессор умножает на заданный коэффициент для получения собственной частоты. При этом контроллер памяти всегда функционирует на той же частоте, что и сам процессор, а частота шины памяти задается целым делителем, который может не совпадать с первоначальным коэффициентом умножения частоты «системной шины». Так, например, режиму DDR-333 на процессоре AMD Athlon 64 3200+ будут соответствовать множитель частоты «системной шины» 10 (частота процессора и контроллера памяти 2000 МГц) и делитель частоты памяти 12 (частота шины памяти 166.7 МГц). Таким образом, под «синхронной» операцией SDRAM в настоящее время следует понимать строгую привязку временных интервалов отправки команд и данных по соответствующим интерфейсам устройства памяти к частоте шины памяти (проще говоря, все операции в ОЗУ совершаются строго по фронту/срезу синхросигнала интерфейса памяти). Так, отправка команд и чтение/запись данных может осуществляться на каждом такте шины памяти (по положительному перепаду – «фронту» синхросигнала; в случае памяти DDR/DDR2 передача данных происходит как по «фронту», так и по отрицательному перепаду – «срезу» синхросигнала), но не по произвольным временным интервалам (как это осуществлялось в асинхронной DRAM).
Понятие «динамической» памяти, DRAM, относится ко всем типам оперативной памяти, начиная с самой древней, «обычной» асинхронной динамической памяти и заканчивая современной DDR2. Этот термин вводится в противоположность понятия «статической» памяти (SRAM) и означает, что содержимое каждой ячейки памяти периодически необходимо обновлять (ввиду особенности ее конструкции, продиктованной экономическими соображениями). В то же время, статическая память, характеризующаяся более сложной и более дорогой конструкцией ячейки и применяемая в качестве кэш-памяти в процессорах (а ранее – и на материнских платах), свободна от циклов регенерации, т.к. в ее основе лежит не емкость (динамическая составляющая), а триггер (статическая составляющая).
Наконец, стоит также упомянуть о «памяти с произвольным доступом» – Random Access Memory, RAM. Традиционно, это понятие противопоставляется устройствам «памяти только на чтение» – Read-Only Memory, ROM. Тем не менее, противопоставление это не совсем верно, т.к. из него можно сделать вывод, что память типа ROM не является памятью с произвольным доступом. Это неверно, потому как доступ к устройствам ROM может осуществляться в произвольном, а не строго последовательном порядке. И на самом деле, наименование «RAM» изначально противопоставлялось ранним типам памяти, в которых операции чтения/записи могли осуществляться только в последовательном порядке. В связи с этим, более правильно назначение и принцип работы оперативной памяти отражает аббревиатура «RWM» (Read-Write Memory), которая, тем не менее, встречается намного реже. Заметим, что русскоязычным сокращениям RAM и ROM – ОЗУ (оперативное запоминающее устройство) и ПЗУ (постоянное запоминающее устройство), соответственно, подобная путаница не присуща.
Микросхемы SDRAM: Физическая организация и принцип работы
В основе работы SDRAM, как и других типов памяти, лежит работа внутреннего ядра – запоминающего устройства динамической оперативной памяти (DRAM). Матрицу DRAM можно представить как таблицу запоминающих ячеек. Эти ячейки составлены из конденсаторов. Ячейки могут содержать один или более «бит» данных, в зависимости от конфигурации чипа. Таблица адресуется через декодеры строк и декодеры столбцов, которые в свою очередь управляются сигналами RAS (сигнал выбора строки – Row Access Strobe) и CAS . (сигнал выбора столбца – Column Access Strobe) Чтобы минимизировать количество разрядов адресной шины при обращении к запоминающей ячейке, используется ее мультиплексирование. Например, если шина адреса содержит 11 разрядов, будут иметься 11 рядов (строк) и 11 адресов (столбцов). Специальные ключи доступа соединены с каждым столбцом, и через них обеспечивается чтение ячейки информации. Так как ячейками хранения информации являются конденсаторы, которые разряжаются при каждой операции чтения, то ключи доступа должны восстановить потерянный заряд ячейки перед концом цикла доступа. Конденсаторы ячеек хранения даже без обращения к ним теряют в течении определенного периода заряд, поэтому они требуют периодического цикла регенерации, иначе данные будут потеряны. Специальное устройство регенерации определяет время между циклами регенерации, а счетчик регенерации гарантирует, что полная матрица (все строки) будет обновлена. Это означает, что некоторые циклы обращения к памяти прерываются для циклов регенерации и имеет место некоторое торможение работы памяти.
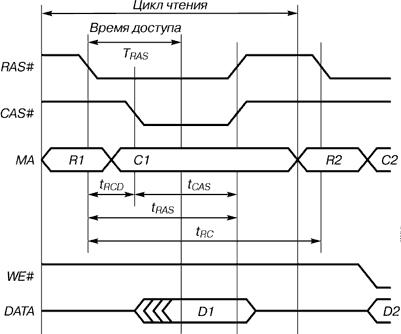
Рис. 9.1.
Схема обращения к ячейке памяти в самом общем случае может быть представлена следующим образом:
1. На адресные линии микросхемы памяти подается адрес строки. Наряду с этим подается сигнал RAS#, который помещает адрес в буфер (защелку) адреса строки.
2. После стабилизации сигнала RAS#, декодер адреса строки выбирает нужную строку, и ее содержимое перемещается в усилитель уровня (при этом логическое состояние строки массива инвертируется).
3. На адресные линии микросхемы памяти подается адрес столбца вместе с подачей сигнала CAS#, помещающего адрес в буфер (защелку) адреса столбца.
4. Поскольку сигнал CAS# также служит сигналом вывода данных, по мере его стабилизации усилитель уровня отправляет выбранные (соответствующие адресу столбца) данные в буфер вывода.
5. Сигналы CAS# и RAS# последовательно дезактивируются, что позволяет возобновить цикл доступа (по прошествии промежутка времени, в течение которого данные из усилителя уровня возвращаются обратно в массив ячеек строки, восстанавливая его прежнее логическое состояние).
Так выглядела реальная схема доступа к ячейке DRAM в самом первоначальном ее варианте, реализованном еще до появления первых реально используемых микросхем/модулей асинхронной памяти типа FPM (Fast Page Mode) DRAM. Тем не менее, нетрудно заметить, что эта схема является достаточно неоптимальной. Действительно, если нам требуется считать содержимое не одной, а сразу нескольких подряд расположенных ячеек, отличающихся только адресом столбца, но не адресом строки, то нет необходимости каждый раз подавать сигнал RAS# с одним и тем же адресом строки (т.е. выполнять шаги 1-2). Вместо этого, достаточно удерживать сигнал RAS# активным на протяжении промежутка времени, соответствующего, например, четырем последовательным циклам чтения (шаги 3-4, с последующей дезактивацией CAS#), после чего дезактивировать сигнал RAS#. Именно такая схема применялась в асинхронной памяти типа FPM DRAM и более поздней EDO (Enhanced Data Output) DRAM. Последняя отличалась опережающей подачей адреса следующего столбца, что позволяло достичь меньших задержек при операциях чтения. В современных микросхемах SDRAM схема обращения к ячейкам памяти выглядит аналогично.
Микросхемы SDRAM: Логическая организация
А пока перейдем к рассмотрению организации микросхем памяти SDRAM на логическом уровне. Как уже было сказано выше, микросхема DRAM, фактически, представляет собой двумерный массив (матрицу) элементов, состоящих из одного или нескольких элементарных физических ячеек. Очевидно, что главной характеристикой этого массива является его емкость, выражаемая в количестве бит информации, которую он способен вместить. Часто можно встретить понятия «256-Мбит», «512-Мбит» микросхем памяти – речь здесь идет именно об этом параметре. Однако составить эту емкость можно разными способами – мы говорим сейчас не о количестве строк и столбцов, но о размерности, или «вместимости» индивидуального элемента. Последняя прямо связана с количеством линий данных, т.е. шириной внешней шины данных микросхемы памяти (но не обязательно с коэффициентом пропорциональности в единицу, что мы увидим ниже, при рассмотрении отличий памяти типа DDR и DDR2 SDRAM от «обычной» SDRAM). Ширина шины данных самых первых микросхем памяти составляла всего 1 бит, в настоящее же время наиболее часто встречаются 4-, 8- и 16- (реже – 32-) битные микросхемы памяти. Таким образом, микросхему памяти емкостью 512 Мбит можно составить, например, из 128М (134 217 728) 4-битных элементов, 64М (67 108 864) 8-битных элементов или 32М (33 554 432) 16-битных элементов – соответствующие конфигурации записываются как «128Mx4», «64Mx8» и «32Mx16». Первая из этих цифр именуется глубиной микросхемы памяти (безразмерная величина), вторая – шириной (выраженная в битах).
Существенная отличительная особенность микросхем SDRAM от микросхем более ранних типов DRAM заключается в разбиении массива данных на несколько логических банков (как минимум – 2, обычно – 4). Не следует путать это понятие с понятием «физического банка» (называемого также «ранком» (rank) памяти), определенным для модуля, но не микросхемы памяти – его мы рассмотрим далее. Сейчас лишь отметим, что внешняя шина данных каждого логического банка (в отличие от физического, который составляется из нескольких микросхем памяти для «заполнения» шины данных контроллера памяти) характеризуется той же разрядностью (шириной), что и разрядность (ширина) внешней шины данных микросхемы памяти в целом (x4, x8 или x16). Иными словами, логическое разделение массива микросхемы на банки осуществляется на уровне количества элементов в массиве, но не разрядности элементов. Таким образом, рассмотренные выше реальные примеры логической организации 512-Мбит микросхемы при ее «разбиении» на 4 банка могут быть записаны как 32Mx4x4 банка, 16Mx8x4 банка и 8Mx16x4 банка, соответственно. Тем не менее, намного чаще на маркировке микросхем памяти (либо ее расшифровке в технической документации) встречаются именно конфигурации «полной» емкости, без учета ее разделения на отдельные логические банки, тогда как подробное описание организации микросхемы (количество банков, строк и столбцов, ширину внешней шины данных банка) можно встретить лишь в подробной технической документации на данный вид микросхем SDRAM.
Разбиение массива памяти SDRAM на банки было введено, главным образом, из соображений производительности (точнее, минимизации системных задержек – т.е. задержек поступления данных в систему). В самом простом и пока достаточном изложении, можно сказать, что после осуществления любой операции со строкой памяти, после дезактивации сигнала RAS#, требуется определенное время для осуществления ее «подзарядки». И преимущество «многобанковых» микросхем SDRAM заключается в том, что можно обращаться к строке одного банка, пока строка другого банка находится на «подзарядке». Можно расположить данные в памяти и организовать к ним доступ таким образом, что далее будут запрашиваться данные из второго банка, уже «подзаряженного» и готового к работе. В этот момент вполне естественно «подзаряжать» первый банк, и так далее. Такая схема доступа к памяти называется «доступом с чередованием банков» (Bank Interleave).
Модули SDRAM: Организация
Основные параметры логической организации микросхем памяти – емкость, глубину и ширину, можно распространить и на модули памяти типа SDRAM. Понятие емкости (или объема) модуля очевидно – это максимальный объем информации, который данный модуль способен в себя вместить. Теоретически он может выражаться и в битах, однако общепринятой «потребительской» характеристикой модуля памяти является его объем (емкость), выраженный в байтах – точнее, учитывая современный уровень используемых объемов памяти – в мега-, или даже гигабайтах.
Ширина модуля – это разрядность его интерфейса шины данных, которая соответствует разрядности шины данных контроллера памяти и для всех современных типов контроллеров памяти SDRAM (SDR, DDR и DDR2) составляет 64 бита. Таким образом, все современные модули характеризуются шириной интерфейса шины данных «x64». Каким же образом достигается соответствие между 64-битная шириной шины данных контроллера памяти (64-битным интерфейсом модуля памяти), когда типичная ширина внешней шины данных микросхем памяти обычно составляет всего 4, 8 или 16 бит? Ответ очень прост – интерфейс шины данных модуля составляется простым последовательным «слиянием» внешних шин данных индивидуальных микросхем модуля памяти. Такое «заполнение» шины данных контроллера памяти принято называть составлением физического банка памяти. Таким образом, для составления одного физического банка 64-разрядного модуля памяти SDRAM необходимо и достаточно наличие 16 микросхем x4, 8 микросхем x8 (это наиболее часто встречаемый вариант) или 4 микросхем x16.
Оставшийся параметр – глубина модуля, являющийся характеристикой емкости (вместимости) модуля памяти, выраженной в количестве «слов» определенной ширины, вычисляется, как нетрудно догадаться, простым делением полного объема модуля (выраженного в битах) на его ширину (разрядность внешней шины данных, также выраженную в битах). Так, типичный 512-МБ модуль памяти SDR/DDR/DDR2 SDRAM имеет глубину, равную 512МБайт 8 (бит/байт) / 64 бита = 64М. Соответственно, произведение ширины на глубину дает полную емкость модуля и определяет его организацию, или геометрию, которая в данном примере записывается в виде «64Мx64».
Возвращаясь к физическим банкам модуля памяти, заметим, что при использовании достаточно «широких» микросхем x8 или x16 ничего не мешает поместить и большее их количество, соответствующее не одному, а двум физическим банкам – 16 микросхем x8 или 8 микросхем x16. Так различают однобанковые (или «одноранковые», single-rank) и двухбанковые («двухранковые», dual-rank) модули. Двухбанковые модули памяти наиболее часто представлены конфигурацией «16 микросхем x8», при этом один из физических банков (первые 8 микросхем) расположен с лицевой стороны модуля, а второй из них (оставшиеся 8 микросхем) – с тыльной. Наличие более одного физического банка в модуле памяти нельзя считать определенным преимуществом, т.к. может потребовать увеличения задержек командного интерфейса.