Электромеханические и механические характеристики двигателя
Заведующий кафедрой
Дарьенков А.Б
(подпись) (фамилия, и., о.)
.
(дата)
ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ.
(наименование темы проекта или работы)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
(вид документа)
Руководитель
Бычков Е.В.
(подпись) (фамилия, и., о.)
(дата)
Студент
Маслова А.С.
(подпись) (фамилия, и., о.)
12-ЭПА .
(дата) (группа или шифр)
Работа защищена(дата)
Протокол № .
С оценкой .
Г.
Содержание:
Введение………………………………………………………………………………………………
1.Исходные данные…………………………………………………………………………………..
2.РАСЧЕТНАЯ ЧАСТЬ………………………………………………………………………………
2.1. Определение приведённых значений статических моментов и момента инерции
исполнительного механизма………………………………………………….................................
2.2. Определение предварительной мощности двигателя и выбор его по каталогу……………
2.3. Расчёт аналитическим методом сопротивлений ступеней пускового реостата……………
2.4. Расчёт сопротивления резистора динамического торможения……………………………
2.5. Расчёт и построение скоростных и механических характеристик для полученных
значений сопротивлений в двигательном и тормозных режимах…………………………
2.5.1. Расчёт и построение механических характеристик для полученных значений
сопротивлений в двигательном режиме…………………………………………………….
2.5.2. Расчёт и построение скоростных характеристик для полученных значений
сопротивлений в двигательном режиме…………………………………………………….
2.5.3. Расчёт и построение механических характеристик для полученных значений
сопротивлений в тормозном режиме…………………………………………………..........
2.5.4. Расчёт и построение скоростных характеристик для полученных значений
сопротивлений в в тормозном режиме……………………………………………………...
2.5. Расчёт кривых изменения угловой скорости и тока в якоре двигателя при пуске,
2.6. торможении и изменении нагрузки. Определение длительности переходных процессов………………………………………………………………………………………….
2.6.1. Расчёт кривых изменения угловой скорости и тока в якоре двигателя при пуске.
Определение длительности переходных процессов……………………………………….
2.6.2. Расчёт кривых изменения угловой скорости и тока в якоре двигателя при торможении.
Определение длительности переходных процессов………………………..
2.6.3. Расчёт кривых изменения угловой скорости и тока в якоре двигателя при изменении
нагрузки. Определение длительности переходных процессов……………………………
2.7. Проверка предварительно выбранного двигателя по нагреву и перегрузке………………….
2.7.1. Проверка предварительно выбранного двигателя по нагреву………………………..
2.7.2. Проверка предварительно выбранного двигателя по перегрузке……………………
2.8. Выбор по каталогу пусковых и тормозных резисторов и составление схемы
соединения секций………………………………………………………………………………..
2.8.1. Выбор по каталогу пусковых резисторов и составление схемы
соединения секций………………………………………………………………………...
2.8.2. Выбор по каталогу резистора динамического торможения и составление
схемы соединения его секций…………………………………………………………….
2.9. Расчёт потерь энергии в якорной цепи двигателя при пуске и торможении………………….
2.9.1. Расчёт потерь энергии в якорной цепи двигателя при пуске………………………...
2.9.2. Расчёт потерь энергии в якорной цепи двигателя при торможении…………………
2.10. Определение КПД электродвигателя за цикл работы…………………………………………
2.11. Определение мощности обмотки возбуждения………………………………………………..
2.13. Описание работы принципиальной электрической схемы электропривода. ………………..
2.14. Выбор аппаратуры управления, защиты и сигнализации……………………………………..
СПЕЦИФИКАЦИЯ.……………………………………………………………………………………
ЛИТЕРАТУРА………………………………………………………………………………………….
Задание
1. Исходные данные
1.1 Нагрузочная диаграмма исполнительного механизма
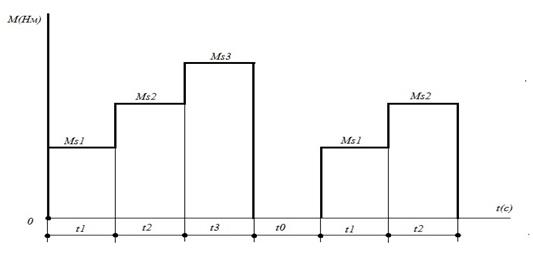
Рисунок 1 - Нагрузочная диаграмма исполнительного механизма
1.1. Параметры нагрузочной диаграммы и данные исполнительного механизма
| Ms1, H∙м | Ms2, H∙м | Ms3, H∙м | to, c | t1, c | t2, c | t3, c | ωм, рад/с | i | ηм | Jм, кг∙м2 |
| 8,37 | 0,8 |
Принятые обозначения:
- Mso, Ms1, Ms2, Ms3 – статические моменты на валу исполнительного
механизма;
- ωм – угловая скорость вала исполнительного механизма;
- i – передаточное число;
- ηм – КПД исполнительного механизма с учетом кинематической системы;
- Jм – момент инерции исполнительного механизма;
1.2. Пуск – реостатный при статическом моменте исполнительного механизма Ms1.
1.3. Торможение – динамическое при независимом возбуждении при статистическом моменте Ms3.
1.4. Регулирование угловой скорости до 30% от синхронной (3 – 4 ступени).
1.5. Питающая сеть переменного тока ~3-TN-S,380 B,50 Гц.
Расчетная часть.
2.1. Определить приведенные значения статических моментов и момента инерции исполнительного механизма.
2.2. Определить предварительно мощность двигателя и выбрать его по каталогу.
2.3. Рассчитать сопротивления ступеней пуско-регулировочного резистора.
2.4. Рассчитать сопротивление резистора электродинамического торможения, выбрать схему питания обмотки статора во время торможения и рассчитать источник питания.
2.5. Рассчитать и построить естественные, скоростную и электромеханическую и механическую характеристики электродвигателя , искусственные механические характеристики в двигательном и тормозных режимах.
2.6.  Рассчитать и построить кривые изменения угловой скорости и момента двигателя при пуске, изменении нагрузки и торможении, определить длительность переходных процессов.
Рассчитать и построить кривые изменения угловой скорости и момента двигателя при пуске, изменении нагрузки и торможении, определить длительность переходных процессов.
2.7. Проверить предварительно выбранный двигатель по нагреву и перегрузке.
2.8. Выбрать по каталогу пусковые, регулировочные и тормозные резисторы и составить схему соединения секций.
2.9. Определить потери энергии в статоре,ротореи во внешнем сопротивлении при пуске и торможении.
2.10. Определить перегрузочную способность электродвигателя при снижении напряжения питающей сети на 15%.
2.11. Определить перегрузочную способность электродвигателя при снижении напряжения питающей сети на 5%.
2.12. Разработать принципиальную электрическую схему электропривода и дать ее описание.Схема упраления должна обеспечивать автоматическое выполнение заданного режима работы, ручное регулирование скорости вращения, необходимые виды защиты электрооборудования.
2.13. Выбрать аппаратуру управления, защиты и сигнализации. Составить перечень элементов.
Графическая часть.
3.1. Принципиальная электрическая схема электропривода.
Электромеханические и механические характеристики двигателя.