Унификация и стандартизация измерительных преобразователей
В отечественном приборостроении вопросы унификации и стандартизации измерительных преобразователей решаются в рамках Государственной системы промышленных приборов и средств автоматизации. Для того чтобы создавать сложные информационные системы (управляющие, измерительные), необходимо в первую очередь обеспечить информационную совместимость технических средств. С этой целью в рамках ГСП сначала были унифицированы, а затем и стандартизированы выходные сигналы ИП (ГОСТ 26.010- 83, 26.011-83, 26.013-83, 26.014-83).
По виду выходных сигналов различают измерительные преобразователи с естественным и унифицированным выходными сигналами. Первые представляют собой устройства, в которых осуществляется первичное (обычно однократное) преобразование измеряемой физической величины. Естественное формирование сигнала здесь обеспечивается методом преобразования и конструкцией ИП. Такие преобразователи чаще всего применяют в устройствах прямого регулирования либо при централизованном контроле сравнительно простых объектов. В ГСП приняты десять типов естественных выходных сигналов (рис. 4.2).
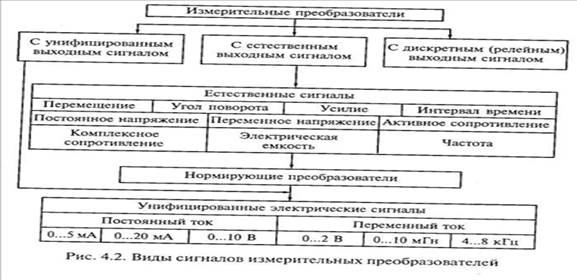
При создании относительно сложных систем с использованием ЭВМ и необходимости передачи сигналов на большие расстояния применяют преобразователи естественных сигналов в унифицированные. Для этих целей разрабатываются специальные нормирующие преобразователи, параметры выходных сигналов которых приведены на рис. 4.2.
Отдельную группу составляют преобразователи с дискретным (релейным) выходным сигналом, контактная группа которых изменяет свое положение при достижении измеряемой величиной заданного значения. Их применяют для позиционного регулирования и сигнализации.
Электроконтактные датчик
Электроконтактные датчики являются наиболее простыми и поэтому наиболее распространенными датчиками, осуществляющими контроль предельных размеров изделия. Однако большинство схем с электроконтактными датчиками не дают возможности определить действительный размер изделия. Индуктивные, емкостные, пневматические и ряд других типов датчиков этого недостатка не имеют.
При помощи устройств с электроконтактными датчиками может осуществляться контроль размеров при обработке деталей, рассортировка деталей на группы в зависимости от действительного размера, контроль погрешности формы и пр. В зависимости от назначения электроконтактные датчики выпускаются однопредельными, двухпредельными и многопредельными.
Контактные измерители разбиваются на две группы: 1) с перемещением контактов, равным перемещению измерительного штока (рис.80,а) и с перемещением контактов, увеличенным по сравнению с перемещением измерительного штока – рычажным.
В рычажных измерительных головках благодаря наличию механизмов, увеличивающих перемещение контактов, погрешности, зависящие от состояния контактов и их настройки уменьшаются пропорционально передаточному отношению. Следовательно, точность контроля рычажными измерителями при прочих разных условиях выше, чем безрычажными.
Наибольшее раслространение получили системы с одним неразноплечим рычагом. Такие системы наиболее просты для передаточных отношений от 3 : 1 до 10 : 1. Шток 1, перемещающийся в направляющих 3 (рис.80,б) и опирающийся на изделие, несет хомут 2, к которому пружина 5 прижимает короткий конец неравноплечего рычага 6. На длинных концах рычага 6 укреплены контакты, замыкающиеся с контактными винтами 4 и 7. При пропускании изделия с завышенным размером хомут 2 отходит от рычага 6.
Рычажные системы для передаточных отношений больших 10 : 1 часто выполняются с короткоплечевыми рычагами по типу применяемых в миниметрах (рис.80,в). Здесь верхний конец измерительного штока 1 действует на траверсу 7, упирающуюся в неподвижную призму 6. Траверса 7 скреплена с рычагом 5, на конце которого имеются контакты 3. Регулируемые контакты 2 и 4 укреплены на конусе головки. Передаточное отношение такой головки определяется отношением длины плеча в рычага к длине плеча а траверсы и может достигать 20 – 30.
Рычажные системы с короткоплечими рычагами сложны в изготовлснии и вытесняются пружинно-рычажными системами (рис.80,г), осуществляющими передаточные отношения до 100 : 1. Механизм имеет две колодки 2 и 7. Колодка 7 закреплена на корпусе, колодка 2 подвешена к ней на двух плоских пружинах 8. В подвижную колодку ввернут, измерительный шток 1, опирающийся концом на контролируемое изделие. Две плоские пружины 6, каждая из которых закреплена нижним концом в своей колодке, вверху жестко соединены между собой и несут на себе стерженек с шариками из изоляционного материала, служащие для замыкания контактов 4. Винты 8 и 5 устанавливают контакты 4 в зависимости от контролируемого размера.

Рис. 80. Типовые схемы электроконтактных датчиков:
а- безрычажный датчик; б- датчик с неравноплечим рычагом; в- датчик с короткоплечим
рычагом; г- датчик с пружинно-рычажным механизмом.
Датчик может быть быстро настроен по одной образцовой детали, величина контролируемого размера которой должна быть аттестована, или по индикатору.