Георадар что это? Наглядные результаты работ
Государственное образовательное учреждение высшего профессионального образования московской области
«Международный университет природы, общества и человека «Дубна»
Факультет естественных и инженерных наук
Кафедра общей и прикладной геофизики
Курсовая работа по дисциплине
«Электроразведка»
Тема: «Георадар»
Выполнил: студент группы 3152
3 курса факультета ЕиИН
Травников А.Э.
Руководитель:
Шевнин Владимир Алексеевич
(профессор)
Дата защиты:________________
Оценка:____________________
(подпись руководителя)
Содержание
Введение................................................................................................ 3
История появления георадара?........................................................... 4
Георадар что это? Наглядные результаты работ............................... 8
Круг задач которые можно решить с помощью георадара............. 13
Первичная обработка георадарных сигналов................................... 15
Заключение.......................................................................................... 17
Список используемой литературы..................................................... 18
Введение
В своей курсовой работе я рассмотрел такое оборудование как геородар, его виды, характеристики и задачи которые он решает. А так же предоставил информацию о первичной обработке георадарных сигналов.
Георадиолокация – так сейчас называют радиолокацию подземных или одповерхностных объектов – возникла из обычной радиолокации самолетов, кораблей, поверхности земли, моря и т.д., окруженных воздушным пространством.
Георадиолокация – высокочастотный метод,что позволяет изучать распространение э\м волнв рамках волновой теории, т.е. говорить о том,что э/м волна подчиняется законам геометрической оптики.
История появления георадара? Их виды и характеристики
Сама идея «посмотреть» под землю, как упоминали разработчики радиолокационной техники 50-х годов прошлого века, приходила в голову многим. Но попытки зарегистрировать сигналы из-под земли не были успешными.
Первое зафиксированное радиоотражение от подповерхностных структур было получено случайно на ледовом аэродроме в Антарктиде А. Уэйтом в 1957 г. Он обратил внимание на то, что радиовысотомер показывал высоту 900 футов еще до момента отрыва самолета от взлетной полосы. Оказалось, что радиовысотомер, который представлял собой импульсный радиолокатор, фиксировал отражение от нижней границы ледника.
Это послужило началом исследований вопроса об использовании радиолокации в геофизике. Позже было выяснено, что применение стандартных радиолокаторов возможно только в очень ограниченном количестве случаев, когда затухание радиоволн в среде мало, например, для льда, сухих песчаников, каменной соли.
Для регистрации сигналов в первых конструкциях радаров использовался стробоскопический осциллограф (прибор, предназначенный для исследования, наблюдения, записи, также измерения амплитудных и временных параметров электрического сигнала, подаваемого на его вход, либо непосредственно на экране), поскольку в то время не было других доступных способов регистрации на таких высоких частотах.
Реально георадиолокация начинает свою историю с 1960 г, когда переход на предложенный И.Куком зондирующий импульс позволил создать прибор, способный работать не только на ледниках.
Толчок к дальнейшему развитию геородара произошёл в начале 90-х годов прошлого века после того, как коллектив учёных во главе с В.В. Копейкином стал участником проекта «Марс-94», который предполагал полет и посадку на поверхность Марса межпланетной автоматической станции.
В соответствии с проектом, по марсианской поверхности должен был двигаться марсоход, на борту которого должен был быть установлен наш прибор – подповерхностный радар -, который позволял бы зондировать марсианскую почву на глубину до 500 метров и определил бы на этих глубинах наличие или отсутствие льда.
Это позволило бы, как задумывали разработчики проекта, приблизиться к решению проблемы «есть ли жизнь на Марсе».
К тому времени уже многие фирмы выпускали малыми партиями наземные локаторы – георадары – и понимали, что поставленную для Марса задачу невозможно решить, по крайней мере, в области известных всем схемных решениях георадара.
Такое решение, которое можно назвать «принципом фотовспышки», удалось найти.
Теория радиолокации говорит о том, что дальность действия прибора зависит от энергии принятого сигнала. В общеизвестных схемах георадаров используется транзисторный передатчик мощностью около 100 ватт и приемник с накоплением энергии принятого сигнала.
По схемному решению, накопление энергии сигнала происходит не в приемнике, а в передатчике. Такой метод накопления энергии проще по технической конструкции, а конструкция легче по весу и более приспособлена к нестабильной бортовой сети. Через маломощный высоковольтный источник питания заряжается конденсатор до нескольких тысяч вольт и замыкается через разрядник на антенну.
Мощность передатчика выросла примерно в 10000 раз и составила 1 мегаватт, что позволило использовать простой и легкий приемник без накопления энергии принятого сигнала. Здесь фактически был реализовали «принцип фотовспышки», известный всем фотолюбителям: в течение длительного времени от маломощной батарейки копится энергия, которая превращается в короткую мощную вспышку света.
Политические и экономические события начала 90-х годов в нашей стране привели к отмене проекта «Марс-94».
После отмены проекта и общего ухудшения экономической обстановки в стране, встал вопрос о выживании коллектива как научного подразделения, который непосредственно занимался проектом «Марс-94».. В то время они решили попробовать свои «марсианские» наработки в земных условиях, в Москве нашли владельцев рижского и ряда других зарубежных приборов, и провели совместно с ними целый ряд экспериментов.
Учёные выяснили, что все георадары построены по практически одной и той же схеме, опубликованной в литературе еще в 1960 г. И.Куком. С тех пор основные изменения претерпела только элементная база, способы запоминания и вывода регистрируемой информации. Их основные характеристики почти ни чем не отличаются от первых образцов. Реальный потенциал этих приборов лежит в пределах 20-40 дБ. Это означает, что прибор обнаруживает подземный объект только тогда, когда сигнал затухает не более чем в 10 – 100 раз по амплитуде. Такое затухание позволяет зондировать высокоомные среды до глубин в несколько десятков сантиметров. К таким средам относится сухой песок, вечная мерзлота, снег, лед. Причем и в них хорошо регистрируются только металлические трубы, границы между слоями почвы, как правило, не видны. Во влажных глинах, которые преобладают в Московской области и вообще в средней полосе России, эти приборы не работают.
У производителей и владельцев георадаров существовало твердое убеждение, что «георадары в глинистых почвах принципиально работать не могут, поскольку радиоволны в глине не распространяются».
Георадары серии, к примеру «Лоза» основаны на схемах, разработанных в свое время для программы «Марс-94».
Первые же испытания макета мощного георадара показали, что новый подход к его схемному решению не только полезен, но переводит прибор в совершенно другой класс по своим возможностям. Реальный потенциал более 120 дБ, который измерили экспериментально, означает, что прибор может регистрировать сигналы, уровень которых падает более чем в миллион раз.
Глинистые почвы стали доступны георадиолокации. Георадар из дорогой и бесполезной игрушки превратился в измерительный прибор, который позволяет решать задачи практически в любых низкоомных средах на глубину первого десятка метров.
Здесь следует особо подчеркнуть, что значительное увеличение возможностей радаров по сравнению с аналогами заключается не только в наращивании мощности передатчика, но и в целом ряде других технических решений, основное из которых заключается в способе регистрации сигнала без трансформации его в низкочастотную область. Появился целый ряд теоретических работ, объясняющих подобные эксперименты, в которых «показывается», что увеличение мощности передатчика хотя и увеличивает сигнал, но во столько же раз увеличивает и помеху, которая почему-то создается зондирующим импульсом при распространении в среде из-за ее «специфической структуры». В них называют мощность в 100 ватт предельной, выше которой соотношение сигнал-шум не увеличивается. Отсюда делается вывод – повышать мощность передатчика не имеет смысла.
Еще одним обязательным условием конструкции георадара с большим реальным потенциалом являются специальные антенны. Они должны быть демпфированными, как, например, резистивно-нагруженные диполи (антенны Ву-Кинга). Дело в том, что «бабочка» без дополнительного искусственного поглощения - а это наиболее распространенный вид антенны – на большинстве даже низкоомных почв недопустимо долго «звенит». Если мы, например, вместо штатных резистивных диполей подключим «бабочку», георадар «Лоза» покажет реальный потенциал не более 40 дБ вместо 120 дБ. Для обычных маломощных георадаров такая «звонкая» структура сигналов от «бабочек» чаще всего не замечается, поскольку она того же порядка, что и «звон» всех остальных узлов стробоскопического приемника.
Интересно отметить, что некоторые экспериментаторы «звон» аппаратуры опять же связывают со «специфической структурой почвы, которую глазом увидеть невозможно, ее чувствуют только радиоволны».
Еще один, очень мощный источник собственных помех от передатчика в стробоскопических радарах – это кабель синхронизации. Правда, сейчас все чаще для этой цели используется оптоволокно вместо коаксиального кабеля, что способствует уменьшению этого рода помех.
Сейчас подавляющее большинство рынка георадаров составляют обычные маломощные приборы со стробоскопическим преобразованием. В США производят георадар SIR, в Канаде – PULSE EKKO, в Швеции – RAMAC, в Японии -OYO и KODEN, в России – ОКО. Латвия, продолжая традиции и наработки РИИГА в области георадаров, выпускает прибор под названием ZONDAS, прежние модификации которого назывались ЗОНД .
Но постепенно, несмотря на скептическую позицию большинства производителей георадаров, подкрепленную собственными экспериментами с повышением мощности передатчика и новой «теорией распространения радиоволн в среде», наши Русские приборы становятся известными на рынке. Об этом говорит динамика продаж.
В 1995 году было выпущено и продано 2 прибора «Грот-5»
В 1996 году было выпущено и продано 2 прибора «Грот-6»
В 1997 году было выпущено 4 и продано 3 прибора «Грот-7»
В 2000 году было выпущено и продано 10 приборов «Грот-10» и 2 прибора «Грот-11»
Георадар что это? Наглядные результаты работ
В настоящее время георадар широко применяется в исследованиях при относительно небольшой глубине залегания целевых объектов (0.2 - 15 метров) за исключением изучения ледников и мерзлых пород, в которых, благодаря высоким сопротивлениям, глубинность повышается.
Георадар - цифровой, портативный, переносимый одним оператором геофизический прибор, предназначенный для решения широкого спектра геотехнических, геологических, экологических, инженерных и других задач, где есть необходимость оперативного мониторинга среды, получения разрезов грунта, не требующих бурения или раскопок. Во время зондирования оператор в реальном времени получает информацию на дисплее в виде радиолокационного профиля (называемого радарограммой). Одновременно данные записываются на жесткий диск компьютера для дальнейшего использования (обработка, распечатка на принтере, интерпретация и т.д.).
Ниже представлены модели георадаров разных типов и моделей:
Рис. 1 Георадар и его составляющие.
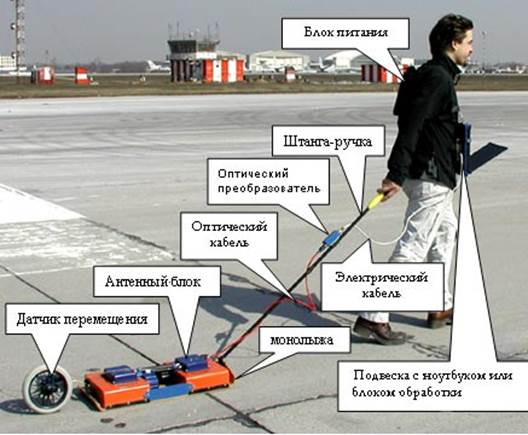




 Рис. 2 АБ-1700Р Рис. 3 Аб-1000Р Рис. 4 АБ-400РАБ
Рис. 2 АБ-1700Р Рис. 3 Аб-1000Р Рис. 4 АБ-400РАБ
аааафавввввввввввввввввввввввввввввввввРис. 5 АБ-1700АБ Рис. 6 АБ-400
Рис. 7 Трехканальный георадарный комплекс для мониторинга железнодорожного полотна
 |
Набор сменных антенных модулей обеспечивает возможность зондирования в большом диапазоне частот (16 – 2000 МГц). Применение той или иной антенной системы определяется решаемой при зондировании задачей. Повышение частоты зондирования приводит к улучшению разрешающей способности; но при этом увеличивается затухание электромагнитной волны в среде, что приводит к уменьшению глубины зондирования; и наоборот, снижением частоты можно добиться увеличения глубины зондирования, но за это придется заплатить ухудшением разрешающей способности. Кроме того, со снижением частоты увеличивается зона начальной нечувствительности (т.н. мертвая зона) георадара.
Ниже приведена таблица зависимости разрешающей способности, мертвой зоны и глубины зондирования в зависимости от применяемой антенны. Предполагается, что зондируется грунт с относительной диэлектрической проницаемостью равной 4 и удельным затуханием 1-2 дБ/метр. Под глубинностью имеется в виду глубина обнаружения плоской границы с коэффициентом отражения 1. Следует иметь в виду, что эти данные весьма приблизительны, они сильно зависят от параметров зондируемой среды.

Таблица 1.
Современные георадары сконструированы для работы в труднодоступных районах с неблагоприятным климатом. И могут применяться в любое время года (рабочая температура георадара –20…+40°С).
Ниже приведены примеры применения метода при решении некоторых (очень немногих) задач.
Обнаружение трех металлических труб, зарытых в землю на глубину 1 - 1.5 метра. Каждая труба дает траекторный сигнал в виде гиперболы, вершина которой соответствует ее местоположению. Частота зондирования 900 МГц. Место зондирования - около г. Даугавпилс, Латвия (рис. 8)

Рис. 8
Обнаружение карстовой полости в известняке под слоем суглинка. Полость (обведена окружностью) видна в левой части профиля в виде чередующихся полос. Суглинок отображен вверху как непрерывный сигнал. Частота зондирования 300 МГц. Место зондирования - берег Мертвого Моря, Израиль.(рис. 9)

Рис. 9
Зондирование кирпичной стены. В середине профиля четко виден сигнал от встроенного в стену металлического шкафа. Частота зондирования 2 ГГц. Место зондирования - г.Рига, Латвия. (рис. 10)

Рис. 10
Профилирование озера со дна пластиковой лодки. Использовалась 500 МГц экранированная антенна. В иле очень хорошо видны металлические объекты (на рисунке обозначены МО). (рис. 11)

Рис.11
Круг задач которые можно решить с помощью георадара
Все задачи, решаемые с помощью георадара, могут быть разделены на две большие группы. С характерными для каждой группы методиками исследований, способами обработки, типами отображения объектов исследования в поле электромагнитных волн и представлениями результата.
2.1 Геологические, инженерно-геологические и гидрогеологические задачи.
а) картирование геологических структур - восстановление геометрии относительно протяженных границ, поверхности коренных пород под рыхлыми осадками, уровня грунтовых вод, границ между слоями с различной степенью водонасыщения, поиск месторождений строительных материалов;
б) определение свойств различных отложений по скорости распространения электромагнитных волн, опираясь на связь этих свойств с диэлектрической проницаемостью пород;
в) определение толщины ледяного покрова;
г) определение мощности водного слоя и картирование поддонных отложений;
д) определение мощности зоны сезонного промерзания, оконтуривание областей вечной мерзлоты, таликов;
2.2 Поиск локальных объектов, обследование инженерных сооружений, нарушений штатных ситуаций.
а) трубопроводов;
б) кабелей;
в) участков разреза с нарушенным естественным залеганием
грунта - рекультивированных земель, засыпанных выемок;
г) погребенных отходов и захоронений;
д) подземных выработок, подвалов, карстовых и суффозионных
провалов;
е) границ распространения углеводородных загрязнений;
ж) поиск скрытых нарушений в стенах наземных сооружений,
шахт, тоннелей, в опорах и перекрытиях;
з) поиск нарушений, возникших в процессе строительства или в
процессе эксплуатации в конструкции автомобильных и железных
дорог, взлетно-посадочных полос аэродромов и т.д.
А теперь я приведу классификацию по месту проведения работ.
1. В геологии - георадары применяются для построения геологических разрезов, определения положения уровня грунтовых вод, границ распространения полезных ископаемых в карьерах, положения карстовых воронок и пустот, толщины льда, глубины и профиля дна рек и озер.
2. В транспортном строительстве – (автомобильные и железные дороги, аэродромы) георадары используются для определения толщины конструктивных слоев дорожной одежды и качества уплотнения дорожно-строительных материалов, изыскания карьеров дорожно-строительных материалов, оценки оснований под транспортные сооружения, определения глубины промерзания в грунтовых массивах и дорожных конструкциях, содержания влаги в грунте земляного полотна и подстилающих грунтовых основаниях, эрозии грунтов на участках мостовых переходов. Поиск любых аномалий под дорожным покрытием.
3. В коммунальных службах – поиск и определение коммуникаций и сетей (металлических и пластиковых!). Только этим прибором возможно нахождение и определение глубины залегания пластиковых водопроводов, газопроводов, систем канализации. Георадар определяет места утечек, а так же врезок на трубопроводах.
4. В решении вопросов охраны окружающей среды и рационального использования земель, георадары используются для оценки загрязнения почв, обнаружения утечек из нефтепроводов, мест захоронения экологически опасных отходов.
5. МЧС – обнаружение остатков взрывоопасных предметов (снарядов, оружия) времен ВОВ.
6. В археологии – при помощи георадаров устанавливают места нахождения археологических объектов и границы их распространения.
Первичная обработка георадарных сигналов
Начнём с обнаружения и оценки параметров отражённых сигналов, где используем преобразование Гильберта, после чего выведем алгоритм первичной обработки.
Модуль преобразования Гильберта для зондирующих и отраженных георадарных импульсов довольно произвольной формы – гладкая аналитическая однополярная функция, имеющая только один максимум, поэтому обнаружение сигнала на временной оси сводится к поиску максимумов модуля преобразования. Полярность импульса определяется по значениям волновой функции в момент времени, соответствующий максимуму модуля.
Преобразование Гильберта от действительной функции x(t) заключается в вычислении некоторой дополнительной функции y(t), у которой все спектральные компоненты имеют такой же модуль, но повернуты по фазе на 90 градусов, т.е. преобразование реализует функцию идеального фазовращателя. Например, для функции  дополнительная функция
дополнительная функция  .
.
Преобразование Гильберта обычно представляют в комплексной форме h(t)=x(t)+iy(t). В теории аналитических сигналов через модуль преобразования Гильберта  определяют огибающую импульса A(t).
определяют огибающую импульса A(t).
 (3)
(3)
В нашем случае дополнительная функция y(t)имеет вполне определенный физический смысл – это «восстановленная» магнитная компонента электромагнитного импульса. Хотя мы и не регистрируем магнитную компоненту зондирующего импульса, по законам электродинамики она в радиоволне обязательно существует, причем ее спектральные компоненты, действительно, повернуты по фазе на 90 градусов по отношению к электрической компоненте.
Таким образом, квадрат модуля преобразования Гильберта можно рассматривать как нормированную функцию плотности полной электромагнитной энергии зондирующего и отраженных импульсов.
Приведем ниже определение преобразования Гильберта для цифровой функции x(t) при числе отсчетов N с шагом  через спектральную плотность S(f) с шагом по частоте
через спектральную плотность S(f) с шагом по частоте 

 (4)
(4)
 (5)
(5)
Для определения полярности отраженных импульсов используется одно из свойств преобразования: максимум модуля соответствует максимуму модуля  действительной знакопеременной функции [2]. Для максимума модуля преобразования Гильберта анализируется знак функции x(t) в соответствующий момент времени. Знак функции соответствует полярности импульса.
действительной знакопеременной функции [2]. Для максимума модуля преобразования Гильберта анализируется знак функции x(t) в соответствующий момент времени. Знак функции соответствует полярности импульса.
А теперь сформулируем алгоритм первичной обработки георадарных данных на основе преобразования Гильберта:
1 Предварительная цифровая фильтрация (не обязательно).
2 Расчет преобразования Гильберта.
3 Поиск локальных максимумов модуля преобразования Гильберта.
4 Определение амплитуды и знака отраженных импульсов по волновой функции для моментов времени, соответствующим локальным максимумам преобразования.
Заключение
Таким образом рассмотрев оборудование «геородар» с разных сторон, я пришёл к выводу что это лучшее и наиболее эффективное оборудование для мало глубинных исследований. Отличительная черта от всех других геофизических оборудований это компактность. Не нужно множество народа что бы работать с ним, достаточно одного оператора ну или 2-ух в зависимости от модели, ну как правило в современных условиях это 1 человек. Быстрота работы тоже является хорошим плюсом этой техники. Хочется отметить что сама работа не сложная и в принципе не утруждает человека. Так же эта тенденция пользуется спросом и нуждается в специалистах что не может не радовать.
Список литературы
Горелик Г.С. Колебания и волны. – М.: ГИФМЛ, 1959. – 572 с.
Финк Л.М. Сигналы, помехи, ошибки. – М.: Радио и связь, 1984. – 256 с.
J.S. Cook. Geophys. 40 865 (1975)
М.И. Финкельштейн, В.Л. Мендельсон, В.А. Кутев. Радиолокация слоистых земных покровов. М.: Советское радио, 1977.
Владов М.Л., Золотарев В.П., Старовойтов А.В. методическое руководство по проведению гоерадиолокационных. Москва, 1997.