Key words – simulation features, automatic control, microprocessor control, programmatic solutions
МОДЕЛИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
А.Н. Андреев
Южно-Уральский государственный университет
Россия, г. Челябинск, пр. Ленина, 76, 454080
Тел./факс +7(3512) 67-92-46, E-mail: aan@susu.ac.ru
Annotation – The simulation features of microprocessor means of automatic control are reviewed. The examples practical (and programmatic) implementation of the similar solutions are submitted.
Key words – simulation features, automatic control, microprocessor control, programmatic solutions.
При проектировании устройств автоматического управления, реализующих достаточно сложные алгоритмы формирования управляющих воздействий (например, регулятор возбуждения синхронного генератора), неизбежным этапом является моделирование замкнутой системы автоматического управления (АСУ), содержащей объект управления и устройство управления, обеспечивающие правильное выполнение некоторого технологического процесса [1]. Существующие методы анализа АСУ предполагают использование передаточных функций отдельных звеньев алгоритмической схемы АСУ и анализ непрерывных во времени сигналов возмущающих и управляющих воздействий [1-2]. Так как большинство современных устройств автоматического управления выполняется на микропроцессорной элементной базе, применение классических методов для их анализа требует учета ряда особенностей.
Во-первых, алгоритмическая схема АСУ рассматривается как система с неограниченным быстродействием, в которой учитываются динамические характеристики только отдельных звеньев, входящих в состав АСУ, такие элементы как сумматоры, а также, передача сигналов между звеньями рассматриваются как без инерционные элементы. Реальная микропроцессорная АСУ имеет конечное быстродействие, причем, время выполнения тех или иных операций может существенно варьироваться в зависимости от множества (иногда даже случайных) факторов. Все это можно учесть, введя в алгоритмическую схему АСУ дополнительные инерционные звенья, что существенно усложнит процесс ее анализа.
Во-вторых, реальные АСУ работают с дискретными сигналами, как по времени, так и по величине. Это значит, что некоторый сигнал во время между двумя соседними отсчетами внутри самой микропроцессорной АСУ просто не существует, а дискретный сигнал на выходе АСУ, сформированный с помощью цифро-аналогового преобразователя (ЦАП) и прошедший через интерполяционный фильтр имеет непрерывную форму. В этом свете, замена дискретных сигналов на непрерывные ступенчатые функции является не совсем адекватной.
В-третьих, возможность обработки непрерывных (аналоговых) сигналов в микропроцессорных системах автоматического управления обеспечивается за счет выполнения аналогово-цифрового преобразования (АЦП), которое вносит определенные искажения в контролируемый сигнал, вызванные ограниченной полосой пропускания (конечная разрядность АЦП) и возможным переполнением разрядной сетки (клипинг сигнала).
Учет этих и других особенностей в рамках алгоритмической схемы АСУ достаточно сложен и нетривиален. Кроме того, рассматриваемая задача моделирования микропроцессорной системы автоматического управления осложняется наличием и необходимостью учета взаимодействия рассматриваемого устройства управления и других устройств автоматического управления, оказывающих то или иное воздействие на объект управления.
Таким образом, при анализе работы микропроцессорных средств автоматического управления представляется целесообразным использовать не математическую модель, представляющую систему дифференциальных уравнений и построенную по алгоритмической схеме АСУ, а некоторую алгоритмическую модель, выполненную как последовательность действий по преобразованию, обработке и передаче сигналов с учетом параметров физических преобразователей (ЦАП иАЦП). При этом, задача анализа такой модели сводится к процессу эмуляции работы микропроцессорной системы (МПС) с конечным (заданным) быстродействием. Применение в качестве эмулятора МПС персонального компьютера (ПК) с аппаратной поддержкой многопоточности (или построенного на многоядерной архитектуре), позволяет эмулировать работу нескольких устройств автоматического управления, работающих независимо друг от друга по индивидуальным алгоритмам и оказывающих управляющие воздействия на один общий объект управления.
В качестве объекта управления может выступать как физическая, так и математическая модель. В первом случае, взаимодействие физической модели объекта управления и моделей микропроцессорных устройств автоматического управления должно осуществляться посредством передачи сигналов между ПК и моделью через плату ввода-вывода аналоговых/дискретных сигналов.

 Для практической реализации подобного подхода был создан программный комплекс Multi-control (MC), работающий с физической моделью через плату ввода-вывода LCARD780M. Комплекс MC позволяет получить систему независимого моделирования нескольких автоматических устройств, управляющих работой отдельных энергетических объектов связанных между собой механической и/или электрической связью. Данный комплекс использован при создании лабораторного стенда «Комплекс – электрическая система», выпускаемого НПИ «Учебная техника и технологии», и представляющего собой модель электроэнергетической системы, содержащую модель турбины, генератора, трансформаторов, линий электропередач, выключателей и др., а также, набор моделей свободно программируемых контроллеров, сопряженных с физическими объектами модели и обеспечивающих автоматическое управление ими. На рис.1 показана структурная схема подобного комплекса автоматического управления.
Для практической реализации подобного подхода был создан программный комплекс Multi-control (MC), работающий с физической моделью через плату ввода-вывода LCARD780M. Комплекс MC позволяет получить систему независимого моделирования нескольких автоматических устройств, управляющих работой отдельных энергетических объектов связанных между собой механической и/или электрической связью. Данный комплекс использован при создании лабораторного стенда «Комплекс – электрическая система», выпускаемого НПИ «Учебная техника и технологии», и представляющего собой модель электроэнергетической системы, содержащую модель турбины, генератора, трансформаторов, линий электропередач, выключателей и др., а также, набор моделей свободно программируемых контроллеров, сопряженных с физическими объектами модели и обеспечивающих автоматическое управление ими. На рис.1 показана структурная схема подобного комплекса автоматического управления.
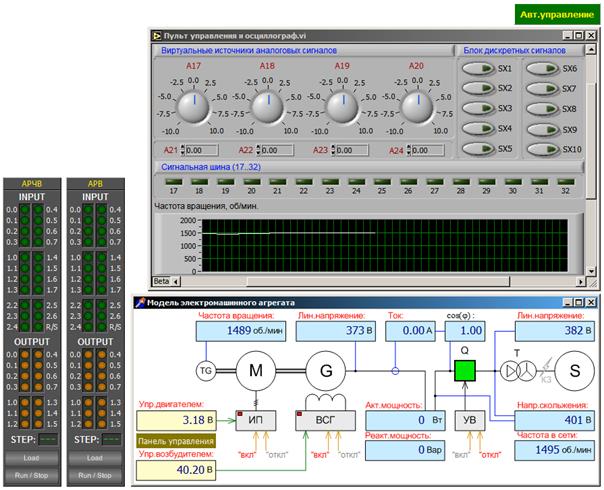
Второй подход, а именно, математическое моделирование объекта управления, предполагает использовать механизм асинхронного обмена информацией между программными приложениями, работающими под управлением многозадачной ОС (операционной системы). Существует целый ряд механизмов реализации подобного обмена, наиболее современным из которых является клиент-серверная архитектура приложений, поддержка которой встроена в программный комплекс MC. Это позволяет подключить к среде MC любую программную реализацию модели объекта управления, являющуюся сервером автоматизации. На рис.2 показан внешний вид экрана ПК при моделировании двух микропроцессорных устройств автоматического управления (АРЧВ и АРВ), воздействующих на математическую модель объекта управления – блока генератор-турбина.
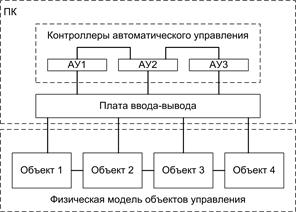
Рис. 1. Структурная схема комплекса автоматического управления
Для системы автоматического управления, модель объекта управления должна отвечать определенным требованиям. Во-первых, подобная модель не должна ограничиваться моделированием только одного объекта, например, генератора, без учета влияния на него реальной электроэнергетической системы, в составе которой он работает. Во-вторых, модель объекта управления должна обеспечивать возможность одновременного моделирования нескольких связанных между собой энергетических объектов. В-третьих, моделирование должно осуществляться в режиме реального времени. Значимость этих требований покажем на простом примере – моделирование автоматического регулятора возбуждения (АРВ) синхронного генератора. Для создания модели АРВ можно использовать выше упомянутый программно-аппаратный комплекс Multi-control, а в качестве объекта управления – его математическую модель, в данном случае, связку турбина-генератор. Однако если эта модель не будет учитывать наличие и особенности работы автоматического регулятора частоты вращения (АРЧВ), то становится невозможным оценить, скажем, влияние быстродействия АРЧВ на работу АРВ. То есть, рассматриваемый АРВ будет находится в искусственных условиях, не позволяющих исследовать его работу во всех возможных режимах. Несоблюдение требования работы модели в режиме реального времени приведет к неравномерности временных параметров (динамическое изменение масштаба по времени), что вообще не позволит оценить эффективность реализованных алгоритмов автоматического управления.
В качестве одного из вариантов решения поставленной задачи предлагается для исследования работы устройств автоматического управления и релейной защиты использовать статическую модель электроэнергетического комплекса, включающую минимальный набор объектов, связанных между собой и допускающих внешнее управление. Примером такой системы, является модель электромашинного агрегата, показанная на рис.2 (внизу справа).
Модель представляет собой программную реализацию работы синхронного генератора в составе объединенной электроэнергетической системы. Основными элементами модели являются: приводной двигатель M, имитирующий паровую или гидравлическую турбину, трехфазный синхронный генератор G, связанный с приводным двигателем механически (на одном валу), выключатель Q, трансформатор T и энергосистему бесконечной мощности S.
Модель обеспечивает управление приводным двигателем посредством управления источником питания ИП приводного двигателя, управление возбуждением синхронного генератора посредством управления возбудителем синхронного генератора ВСГ, а также управление состоянием («включено» / «выключено») выключателя Q. В качестве измеряемых сигналов выступают: частота вращения электромашинного агрегата n, линейное напряжение на выводах статорной обмотки генератора  , его активная
, его активная  , реактивная
, реактивная  мощность, ток
мощность, ток  и
и  , линейное напряжение со стороны системы
, линейное напряжение со стороны системы  , напряжение скольжения
, напряжение скольжения  и частота вращения синхронных машин в сети
и частота вращения синхронных машин в сети  .
.
Программа поддерживает возможность управления по двум аналоговым и шести дискретным сигналам от внешних (физических) устройств автоматического управления, а также вывод режимных параметров электромашинного агрегата по восьми аналоговым каналам платы ввода-вывода сигналов. Это означает, что модель может использоваться при разработке, наладке и настройке параметров реальных устройств автоматического управления энергоблоком, выполненных на полупроводниковой или микропроцессорной элементной базе. Взаимодействие модели со средой Multi-control также позволяет в качестве устройств управления использовать их программные модели.
Рассмотрим основные принципы, которые были использованы при реализации программы. За основной параметр была принята частота вращения электромашинного агрегата n. В режиме холостого хода, уравнение, описывающее зависимость частоты вращения агрегата от величин моментов, воздействующих на его вал и выраженных в относительных единицах, описывается известным уравнением [3]:
 (1)
(1)
где:
 – вращающий момент, создаваемый приводным двигателем и пропорциональный напряжению управления источником питания приводного двигателя;
– вращающий момент, создаваемый приводным двигателем и пропорциональный напряжению управления источником питания приводного двигателя;
 – момент сопротивления агрегата, определяемый трением и нагрузкой синхронного генератора;
– момент сопротивления агрегата, определяемый трением и нагрузкой синхронного генератора;
 – механическая постоянная времени электромашинного агрегата, фактически равная времени полной остановки агрегата при его отключении от сети и действии неизменного момента сопротивления =1.
– механическая постоянная времени электромашинного агрегата, фактически равная времени полной остановки агрегата при его отключении от сети и действии неизменного момента сопротивления =1.
Любое изменение режимных параметров, такое как изменение вращающего момента приводного двигателя, или изменение тока возбуждения синхронного генератора, приводит к протеканию электромеханического переходного процесса, при котором происходит изменение частоты от некоторого текущего значения  до нового установившегося значения
до нового установившегося значения  в соответствии с уравнением (1). Для решения дифференциального уравнения, описывающего данный переходный процесс необходимо знать величину , которая определяется напряжением управления приводного двигателя
в соответствии с уравнением (1). Для решения дифференциального уравнения, описывающего данный переходный процесс необходимо знать величину , которая определяется напряжением управления приводного двигателя  и напряжением управления источником возбуждения
и напряжением управления источником возбуждения  синхронного генератора:
синхронного генератора:
 (2)
(2)
и задается в виде статической характеристики, рассчитанной в среде математического моделирования, например, VisSim или MathLab [4], или снятой с реального электромашинного агрегата. А зависимость напряжения на выводах статорной обмотки синхронного генератора определяется текущей частотой вращения и напряжением возбуждения по другой статической характеристике:
 (3)
(3)
В синхронном режиме, частота вращения электромашинного агрегата определяется частотой вращения синхронных агрегатов в системе, а режимные параметры , , , и являются функциями напряжения управления приводным двигателем и напряжения управления током возбуждения синхронного генератора, которые также задаются в виде статических характеристик.
Моделирование электромагнитных переходных процессов при таком подходе невозможно, и это основной его недостаток. Поэтому область применения статических моделей и рассматриваемой программы в частности, ограниченна. Однако, большинство устройств релейной защиты и автоматики по принципу действия реагируют только на действующие значения токов, напряжений, мощности и др. В этих условиях применение статических моделей позволяет выполнять отладку устройств автоматического управления в полном объеме. При этом, если статические характеристики модели сняты с реального агрегата, а коэффициенты трансформации измерительных цепей и цепей управления модели соответствуют коэффициентам реальных сигнальных цепей, то работа устройства автоматического управления или устройства защиты на рассматриваемой модели будет практически полностью соответствовать его работе с реальным объектом.
Программный комплекс Multi-Control, позволяет моделировать независимую работу до 12 устройств автоматического управления. Каждое устройство представляет собой виртуальную модель промышленного образца свободно-программируемого контроллера FPC101AF, обладающего набором из 10 аналоговых и 20 дискретных входных/выходных сигналов. Взаимодействие контроллеров между собой и с объектом управления обеспечивается благодаря наличию в среде МС гибких средств маршрутизации виртуальных аналоговых и дискретных сигналов (рис.3), а также возможности управления передачей и преобразованием сигналов через программную оболочку LabView. Работа среды MC, как с виртуальными сигналами, так и с реальными электрическими величинами (через плату ввода-вывода) позволяет создавать системы автоматического управления, как физическими объектами, так и моделями этих объектов. Эмуляция нескольких независимых виртуальных устройств – контроллеров, работающих по индивидуальному алгоритму и выполняющих свой набор функций, позволяет моделировать работу комплекса устройств автоматического управления в режиме реального времени. При этом множество особенностей, характерных только для микропроцессорной системы автоматического управления, учитываются простым и естественным способом – на уровне ее программной эмуляции.

Рис. 3. Подключение сигналов
Если в качестве объекта управления выступает модель электрической системы, то реализация сложного комплекса автоматического управления моделью сводится к разработке относительно простых алгоритмов работы отдельных автоматических устройств, таких как АРЧВ, АРВ, АПВ, АВР и др., и настройке их параметров при совместной работе. Созданная таким способом система близка по принципу построения к реальным комплексам автоматического управления электроэнергетическими объектами и позволяет изучить не только работу отдельных устройств релейной защиты и автоматики, но и исследовать взаимодействие этих устройств между собой.