Выбор электродвигателя и кинематический расчет привода
Выбор кинематической схемы
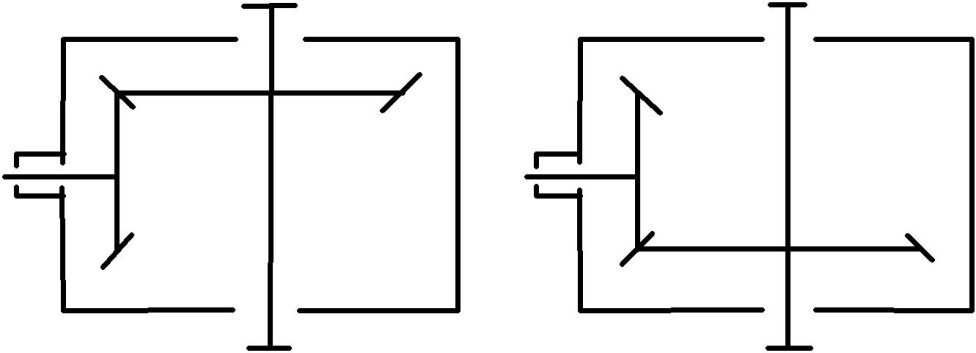
а) б)
Рисунок 1 - Кинематические схемы конических передач, применяемых в современном редукторостроении
Проектируемый привод предполагается эксплуатировать в закрытом, отапливаемом, вентилируемом, производственном помещении снабженным подводом силовой электроэнергии. В современном редукторостроении применяют следующие кинематические схемы конический передач (см. рис.1):
Конические редукторы применяют для передачи движения между пересекающимися валами. Достоинства передач: высокая плавность зацепление, большое применение поскольку конструкция машин часто вынуждает располагать валы под углом друг к другу. Недостатки: потребность в дорогостоящем оборудовании для изготовления конических колёс. Следует отдавать предпочтение редукторам с консольным расположением колеса, при котором обеспечивается лучшие зацепления. Также эта схема проще в монтаже и обеспечивается более точное зацепление.
На основании выше изложенного для проектируемого редуктора применяем кинематическую схему на (рис.1б).
Выбор электродвигателя и кинематический расчет привода
Привод будет использоваться в закрытом, вентилируемом , отапливаемом производственном, помещении снабженном подводом силовой электроэнергии (380В)
В настоящее время в машинных установках находят применение электродвигатели переменного и постоянного тока. К недостаткам двигателей постоянного тока относятся: потребность в специальных источниках постоянного тока или в преобразователях переменного тока в постоянный, так как общая сеть питается обычно переменным током, повышенные габариты, вес и стоимость по сравнению с двигателями переменного тока. Поэтому двигатели постоянного тока распространены значительно меньше, чем двигатели переменного тока. Поэтому выбираем двигатель переменного тока.
Двигатели переменного тока делятся на трехфазные и однофазные.
Однофазные двигатели сравнительно небольшой мощности можно включать в осветительную сеть. Поэтому они удобны для различных бытовых приборов. Недостатки – сравнительно низкий к.п.д., наличие скользящих контактов.
В промышленности используют преимущественно трехфазные двигатели.
Трехфазные двигатели в свою очередь разделяются на синхронные и асинхронные.
Трехфазные синхронные двигатели имеют постоянную угловую скорость независимо от величины нагрузки и практически не регулируются. Недостатки – сравнительно сложное оборудование и относительно высокая стоимость, так как пуск синхронного двигателя (его разгон до синхронной угловой скорости) связан с применением дополнительного оборудования.
Трехфазные асинхронные двигатели с короткозамкнутым ротором получили самое широкое применение. Для транспортеров, конвейеров и других механизмов.
Таким образом, на основании вышеизложенного, в проектируемом приводе назначаем электродвигатель серии АИР.
Вычисляем требуемую мощность электродвигателя по следующей формуле: 
Где:
Рпр - мощность на приводном валу (КВт), заданное по заданию
пр- механический КПД привода.
где:
м – КПД муфты
ред – КПД редуктора
рп - КПД ременной передачи
Для одноступенчатого конического редуктора имеем: ред= кон
Где: кон – механический КПД закрытой конической передачи.
В соответствии с данными таблицы 1 (Детали машин Иванов М.Н.) имеем, КПД конической передачи кон=(0,95..0,97), принимаем кон=095.
Ременные передачи рп=(0,94..0,96) принимаем рп=0,94.
Муфта м=0,98.
Исходя из этого, получаем КПД привода, равное:
пр= м· ред · рп=0,98·0,95·0,94=0,86
Теперь вычисляем требуемую мощность двигателя:
 =
= 
3. выбираем рекомендуемый диапазон частоты вращения ротора электродвигателя по формуле:

Где: nпр – частота вращения приводного вала (мин-1), имеет заданное значение nпр=300 мин-1
 - рекомендуемое значение передаточного число привода. Для заданного привода имеем:
- рекомендуемое значение передаточного число привода. Для заданного привода имеем:

Где:  - рекомендуемое значение передаточного числа ременной передачи
- рекомендуемое значение передаточного числа ременной передачи
 - рекомендуемое значение передаточного число редуктора.
- рекомендуемое значение передаточного число редуктора.
Для одноступенчатого конического редуктора получаем:
=  , где - рекомендуемое значение передаточного числа конического редуктора.
, где - рекомендуемое значение передаточного числа конического редуктора.
В итоге получаем формулу для вычисления рекомендуемого диапазона частоты вращения ротора электродвигателя в виде:

Из таблицы рекомендуемых для некоторых видов одноступенчатых механический передач их передаточных чисел берем:
 ,
,  , подставляя эти значении в формулу получаем:
, подставляя эти значении в формулу получаем:
 (мин-1)
(мин-1)
Теперь из каталога двигателей, выбираем нужный нам двигатель по параметрам Рэд, Ддв. По получившимся параметрам выбираем двигатель:
АИР 80B4ТУ16-525.564-84
Рдв=1.5 кВт
nпр=1410 мин-1
d1=27 мм
l1=50 мм
Отношение максимального вращающего момента к номинальному

Определяем требуемое передаточное число привода по формуле:

Требуемое значение  передаточного числа одноступенчатого конического редуктора определяем по формуле:
передаточного числа одноступенчатого конического редуктора определяем по формуле:  ,где
,где  -рекомендуемое передаточное число для ременных передач, обычно его принимают мин. из диапазона, поэтому согласно таблице рекомендуемых диапазонов принимаем
-рекомендуемое передаточное число для ременных передач, обычно его принимают мин. из диапазона, поэтому согласно таблице рекомендуемых диапазонов принимаем  .
.
Исходя из этого, получаем: 
Так как у нас редуктор одноступенчатый, то значение  согласовывается с ближайшим меньшим стандартизированным значением(ГОСТ 2185), исходя из этого
согласовывается с ближайшим меньшим стандартизированным значением(ГОСТ 2185), исходя из этого 
Теперь можем определить 
Теперь определяем частоту вращения:
1) Входного вала.
Частота вращения входного вала определяется по формуле:
nl=  мин-1
мин-1
2) Выходной вал.
Частота вращения выходного вала определяется по формуле:

Для нашего привода имеем nпр=nll
По расчетам получилось что заданное значение n оказалось примерно равно получившемуся значению nll выходного вала, а значит расчеты верны (300≈298,4)
Силовой расчет привода.
В этом разделе мы рассчитаем вращающие моменты электродвигателя и привода.
Тэд=9550  , где: Рэд - мощность электродвигателя, nэд – частота вращения электродвигателя.
, где: Рэд - мощность электродвигателя, nэд – частота вращения электродвигателя.
Подставляя известные значения в формулу, получаем:
Тэд= 


