Силовий розрахунок початкової ланки
Задачі
Визначення реакцій (тисків) у кінематичних парах механізму з урахуванням сил інерції, а також зрівноважувальної сили або зрівноважувального моменту, які прикладені до початкової ланки.
При цьому аналізі відомі:
l кінематична схема механізму (КСМ);
l масові характеристики ланок (маси, моменти інерції, положення центрів мас);
l зовнішні сили, що діють на ланки механізму;
l закон руху початкової ланки.
Сили, що діють на ланки механізму
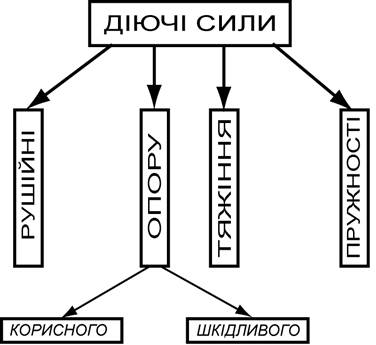
Розглянемо блок-схему, наведену на рис. 5.1.
|
| Рис. 5.1. Сили, що діють на ланки механізму |
5.2.1. Рушійні сили – це сили, робота яких за цикл усталеного руху додатна.
 . .
| (5.1) |
Рушійні сили задаються у вигляді діаграм, наприклад (рис.5.2):

| 
|
| а. | б. |
| Рис. 5.2: а. – індикаторна діаграма для ДВЗ; б. – механічна характеристика асинхронного двигуна |
5.2.2. Сили опору – це сили, робота яких за цикл усталеного руху від'ємна.
5.2.2.1. Сили корисного опору – це сили, для подолання яких призначено механізм.
Сили корисного опору задаються у вигляді діаграм, наприклад,
(рис. 5.3):
 а.
а.
|  б.
б.
|
| Рис. 5.3: а. – сила різання в металообробних верстатах; б. – сила тиску в пресах |
5.2.2.2. Сили шкідливого опору – це сили, для подолання яких необхідно витратити роботу понад тої роботи, що йде на виконання технологічного процесу. Наприклад, сили тертя в кінематичних парах механізму.
5.2.3. Сили тяжіння
 , ,
| (5.2) |
де  - маса, кг;
- маса, кг;  - прискорення вільного падіння, м/с2.
- прискорення вільного падіння, м/с2.
Робота сил тяжіння за цикл усталеного руху дорівнює нулю.
5.2.4. Сили пружності
 , ,
| (5.3) |
де  - коефіцієнт жорсткості, Н/м;
- коефіцієнт жорсткості, Н/м;  - переміщення, м.
- переміщення, м.
Робота сил пружності за цикл усталеного руху дорівнює нулю.
Принцип кінетостатики
Принцип кінетостатики полягає в тому, що в число зовнішніх сил, що діють на ланки механізму, запроваджують сили інерції, які є фіктивними для самої ланки, але реальними для її зв'язків.
Принцип кінетостатики ґрунтується на відомому положенні Д'Аламбера, згідно з яким система сил, до якої уведені сили інерції, вважається рівноважною, і для неї придатні рівняння статики.
Отже, при включенні в число сил, що діють на ланку, сили інерції, ланка умовно вважається у стані спокою, тому можна застосовувати рівняння статики.
Цей принцип є методологічним.
Урахування сил інерції
5.4.1. Плоско паралельний рух ланки
Згадаємо спочатку поняття маси і моменту інерції.
Маса – це міра інертності тіла при поступальному русі.
Момент інерції – це аналог маси при обертальному русі.
Зв'язок між масою і моментом інерції:
 , ,
| (5.4) |
де - маса, кг;  - радіус інерції, м.
- радіус інерції, м.
Розглянемо ланку ВС, яка здійснює плоскопаралельний рух (рис. 5.4,а) та її план прискорень (рис. 5.4,б).
Елементарна сила інерції  для матеріальної точки визначається за формулою:
для матеріальної точки визначається за формулою:
 , ,
| (5.5) |
де  - елементарна маса;
- елементарна маса;  - прискорення матеріальної точки.
- прискорення матеріальної точки.

|
| Рис. 5.4. Урахування сили інерції при плоскопаралельному русі ланки: а. – ланка, що здійснює плоскопаралельний рух; б. – план прискорень ланки |
Виділяємо на ланці ВС (рис. 5.4,а) матеріальну точку D, тоді для неї:
 .
.
Аналогічно для матеріальної точки К:
 .
.
Але ланка – це система матеріальних точок, отже, для ланки маємо головний вектор сил інерції, Н:
 , ,
| (5.6) |
де - маса ланки, кг;  - прискорення центра мас ланки, м/с2.
- прискорення центра мас ланки, м/с2.
Ураховується також головний момент сил інерції, Нм:
 , ,
| (5.7) |
де  - момент інерції, кгм2;
- момент інерції, кгм2;  - кутове прискорення ланки, с-2.
- кутове прискорення ланки, с-2.
 , ,
| (5.8) |
де  - тангенціальне прискорення, м/с2;
- тангенціальне прискорення, м/с2;  - довжина ланки, м.
- довжина ланки, м.
Для спрощення розрахунків головний вектор  і головний момент
і головний момент  сил інерції замінюються результуючою силою , плече якої h дорівнює (рис. 5.5):
сил інерції замінюються результуючою силою , плече якої h дорівнює (рис. 5.5):
 або в масштабі: або в масштабі:  . .
| (5.9) |

| |
| Рис. 5.5. Прикладання результуючої сили інерції |
Із центра мас ланки S проводимо коло радіусом  , результуюча сила прикладається по дотичній до цього кола, паралельно та протилежно (ps), і утворює момент проти e (рис. 5.5).
, результуюча сила прикладається по дотичній до цього кола, паралельно та протилежно (ps), і утворює момент проти e (рис. 5.5).
5.4.2. Поступальний рух ланки
При поступальному русі ланки враховується тільки головний вектор сил інерції , а головний момент сил інерції  , т. щ.
, т. щ.  (рис. 5.6).
(рис. 5.6).

| 
|
| Рис. 5.6. Урахування сил інерції при поступальному русі | Рис. 5.7. Урахування сил інерції при обертальному русі навколо центральної осі |
5.4.3. Обертальний рух ланки навколо центральної осі
При обертальному русі навколо центральної осі враховується тільки головний момент сил інерції  , а головний вектор сил інерції
, а головний вектор сил інерції  ,т. щ.
,т. щ.  (рис. 5.7).
(рис. 5.7).
5.4.4. Обертальний рух відносно довільної осі
До ланки ОА прикладені головний вектор і головний момент сил інерції (рис. 5.8).
Переносимо вектор в довільну точку K, одразу прикладаючи протилежно йому той же вектор .

|
| Рис. 5.8. Урахування сил інерції при обертальному русі відносно довільної осі |
Визначаємо плече  (це перпендикуляр із т. K на вектор ):
(це перпендикуляр із т. K на вектор ):
 .
.
Визначаємо відстань SK, розглядаючи трикутник KSN:

Отже,
 , ,
| (5.10) |
де - радіус інерції, м.
Точка K називається центром хитання ланки.
5.5. Умови статичної визначуваності кінематичного ланцюга (КЛ)
5.5.1. Кінематичний ланцюг із нижчими парами
Нехай до ланки ВС із нижчими парами прикладені головний вектор  і головний момент
і головний момент  усіх сил, ураховуючи й сили інерції (рис. 5.9).
усіх сил, ураховуючи й сили інерції (рис. 5.9).
Невідомими є:  - реакція в шарнірі В (невідома за величиною та напрямком);
- реакція в шарнірі В (невідома за величиною та напрямком);  - реакція в поступальній парі (невідома за величиною та точкою прикладання).
- реакція в поступальній парі (невідома за величиною та точкою прикладання).
Позначимо:  – число рухомих ланок КЛ;
– число рухомих ланок КЛ;  – число рівнянь, які можна скласти;
– число рівнянь, які можна скласти;  – число кінематичних пар (КП) 5-го класу;
– число кінематичних пар (КП) 5-го класу;  - число невідомих реакцій.
- число невідомих реакцій.
Перевіряємо умову статичної визначуваності для ланки: замість умови  маємо
маємо  або
або  .
.
Висновок: У кінематичному ланцюгу з нижчими парами ланка з прикладеними до неї силами є статично невизначеною системою.
Отже, і механізм із нижчими парами є статично невизначеною системою.

|
| Рис. 5.9. Ланка з нижчими парами |
Перевіряємо умову статичної визначуваності для групи Ассура:

| (5.11) |
або - умова статичної визначуваності групи Ассура.
Висновок: для визначення реакцій у кінематичних парах механізму його треба розділити на групи Ассура і для цих груп обчислювати невідомі реакції.
5.5.2. Кінематичний ланцюг із вищими парами
Нехай до ланки ВС із вищою парою С прикладені головний вектор і головний момент усіх сил, ураховуючи й сили інерції (рис. 5.10).
Невідомими є: - реакція в шарнірі В (невідома за величиною та напрямком); - реакція в поступальній парі (невідома за величиною), точка прикладання її відома.
 Рис. 5.10. Ланка з вищою парою
Рис. 5.10. Ланка з вищою парою
|
Умова статичної визначуваності плоского КЛ із вищими парами:
 або
або
 , ,
| (5.12) |
отже,  , 3=3.
, 3=3.
Умова справедлива тільки для плоскої системи сил.
5.5.3. Умова статичної визначуваності просторового
кінематичного ланцюга (КЛ)
Для просторового КЛ справедлива умова:
 або
або
 . .
| (5.13) |
5.6. Силовий розрахунок плоского механізму
Силовий розрахунок проведемо на прикладі вже відомого з КАМ шарнірно-важільного механізму завантажника, наведеного на рис. 4.4.
Силовий розрахунок проводимо для одного заданого робочого положення механізму (рис.5.11).
Механізм є статично невизначеною системою, тому розділяємо його на групи Ассура 4-5 (рис. 5.11, в), 2-3 (рис. 5.11, д) і початкову ланку (рис. 5.11, ж).
Розрахунок здійснюється за формулою будови механізму, починаючи з останньої приєднаної групи Ассура.
 .
.
5.6.1. Група 4-5 (рис. 5.11,в)
1. Визначаємо сили, що діють на групу 4-5:
l сили тяжіння, Н:
 ,
,
де  - маси ланок 4 і 5, кг (за завданням);
- маси ланок 4 і 5, кг (за завданням);  - прискорення вільного падіння. Сили тяжіння прикладені в центрах мас
- прискорення вільного падіння. Сили тяжіння прикладені в центрах мас  .
.
l сила корисного опору  , Н, визначається для даного положення
, Н, визначається для даного положення
механізму за заданим графіком  , вона прикладена в т. С повзуна (напрямок за завданням або проти вектора швидкості повзуна
, вона прикладена в т. С повзуна (напрямок за завданням або проти вектора швидкості повзуна  .
.

| 
|
| а. | б. |
 в.
в.
| |

| |

| |

| |
| Рис. 5.11. Силовий розрахунок механізму 2-го класу: а. – КСМ; б.- план прискорень; в. – група 4-5; г.- план сил групи 4-5; д. – група 2-3; е.- план сил групи 2-3; ж.- початкова ланка; з.- план сил початкової ланки |
l сили інерції ланок, Н:
Ø повзуна С:
 , ,
| (5.14) |
де  =
=  , т. щ. точки
, т. щ. точки  і
і  збігаються. Прикладена в т. С повзуна проти вектора прискорення
збігаються. Прикладена в т. С повзуна проти вектора прискорення  .
.
Ø шатуна СВ:
 - головний вектор сил інерції;
- головний вектор сил інерції;
 - головний момент сил інерції, Нм;
- головний момент сил інерції, Нм;
де  - момент інерції, кгм2 (за завданням);
- момент інерції, кгм2 (за завданням);  - кутове прискорення ланки, с-2;
- кутове прискорення ланки, с-2;
 . .
| (5.15) |
Плече результуючої сили інерції, м:
 або в масштабі
або в масштабі  , мм:
, мм:  .
.
Із центра мас ланки СВ проводимо коло радіусом  . Результуюча сила
. Результуюча сила  прикладена по дотичній до цього кола паралельно та протилежно вектору
прикладена по дотичній до цього кола паралельно та протилежно вектору  та утворює момент проти (напрям кутового прискорення знайдений за методикою п. 4.5.4.4).
та утворює момент проти (напрям кутового прискорення знайдений за методикою п. 4.5.4.4).
Для даної групи невідомими є:
l реакція  в шарнірі В (за величиною та напрямком);
в шарнірі В (за величиною та напрямком);
l реакція  в поступальній парі “повзун - стояк” (за величиною та напрямком, але відомо, що вона перпендикулярна до осі руху повзуна С);
в поступальній парі “повзун - стояк” (за величиною та напрямком, але відомо, що вона перпендикулярна до осі руху повзуна С);
l внутрішня реакція  в шарнірі С.
в шарнірі С.
1. Розкладаємо реакцію на нормальну та тангенціальну складові:
 , ,
| (5.16) |
де  паралельна ланці СВ;
паралельна ланці СВ;  - перпендикулярна до ланки СВ.
- перпендикулярна до ланки СВ.
2. Для визначення тангенціальної складової складаємо рівняння суми моментів усіх сил, що діють на ланку СВ, відносно т. С:
 .
.
Плечі сил беремо безпосередньо з креслення в мм.
 . .
| (5.17) |
Звідки:
 . .
| (5.18) |
УВАГА! Якщо знак отриманої реакції “-” (мінус), це означає, що справжній напрям реакції протилежний прийнятому раніше. Тоді вектор закреслюємо і спрямовуємо реакцію в протилежний бік (справжній вектор тоді рисується суцільною лінією).
3. Для визначення решти невідомих реакцій складаємо загальне векторне рівняння рівноваги всіх сил, що діють на групу 4-5 (невідомі реакції ставимо по кінцях рівняння):
 . .
| (5.19) |
У відрізках:
 . .
| (5.20) |
4. Будуємо план сил групи 4-5 (рис. 5.11,г), прийнявши масштаб плану сил  і складаємо всі сили за рівнянням рівноваги. Із т.
і складаємо всі сили за рівнянням рівноваги. Із т.  проводимо лінію, паралельну лінії дії реакції (в даному випадку – вертикальну), а з т.
проводимо лінію, паралельну лінії дії реакції (в даному випадку – вертикальну), а з т.  - пряму, паралельну лінії дії реакції (тобто паралельно ланці ВС). На перетині отримуємо т.
- пряму, паралельну лінії дії реакції (тобто паралельно ланці ВС). На перетині отримуємо т.  .
.
5. Визначаємо невідомі реакції:
 .
.
З'єднуємо т.  і . Отримуємо реакцію:
і . Отримуємо реакцію:  .
.
6. Для визначення невідомої внутрішньої реакції в шарнірі В складаємо векторне рівняння рівноваги однієї з ланок групи, наприклад, ланки 5 (повзуна С):
 . .
| (5.21) |
У відрізках:
 . .
| (5.22) |
З'єднуємо т.  і т. на плані сил. Отримуємо реакції:
і т. на плані сил. Отримуємо реакції:
 .
.
 .
.
5.6.2. Група 2-3 (рис. 5.11, д)
Це двоповодкова група.
1. Визначаємо сили, що діють на групу:
l сили тяжіння ланок 2 і 3, Н:
 ;
;  ,
,
де  - маси ланок, кг (за завданням). Сили тяжіння прикладені в центрах мас ланок
- маси ланок, кг (за завданням). Сили тяжіння прикладені в центрах мас ланок  і
і  .
.
l сили інерції ланок 2 і 3:
Ø ланки 2 (АВ):
 - головний вектор сил інерції, Н;
- головний вектор сил інерції, Н;
 - головний момент сил інерції, Нм,
- головний момент сил інерції, Нм,
де  - момент інерції, кгм2 (за завданням);
- момент інерції, кгм2 (за завданням);  - кутове прискорення ланки, с-2;
- кутове прискорення ланки, с-2;
 .
.
Плече результуючої сили інерції, м:
 або в масштабі , мм:
або в масштабі , мм:  .
.
Із центра мас ланки ВА проводимо коло радіусом  . Результуюча сила
. Результуюча сила  прикладена по дотичній до цього кола паралельно та протилежно вектору
прикладена по дотичній до цього кола паралельно та протилежно вектору  та утворює момент проти (напрям кутового прискорення знайдений за методикою п. 4.5.4.4).
та утворює момент проти (напрям кутового прискорення знайдений за методикою п. 4.5.4.4).
Ø ланки 3 (ВО2):
 - головний вектор сил інерції, Н;
- головний вектор сил інерції, Н;
 - головний момент сил інерції, Нм,
- головний момент сил інерції, Нм,
де  - момент інерції, кгм2 (за завданням);
- момент інерції, кгм2 (за завданням);  - кутове прискорення ланки, с-2;
- кутове прискорення ланки, с-2;
 .
.
Плече результуючої сили інерції, м:
 або в масштабі , мм:
або в масштабі , мм:  .
.
Примітка: Якщо величина z менше 1 мм, то результуюча сила інерції прикладається в центрі мас ланки S (поруч із групою слід указати значення z, мм).
Із центра мас ланки ВО2 проводимо коло радіусом  . Результуюча сила
. Результуюча сила  прикладена по дотичній до цього кола паралельно та протилежно вектору
прикладена по дотичній до цього кола паралельно та протилежно вектору  та утворює момент проти (напрям кутового прискорення знайдений за методикою п. 4.5.4.4).
та утворює момент проти (напрям кутового прискорення знайдений за методикою п. 4.5.4.4).
l у шарнірі В прикладається сила  , яка перенесена з плану
, яка перенесена з плану
сил групи 4-5 паралельно та протилежно .
 .
.
2. Для даної групи невідомими є:
l реакція  в шарнірі А (за величиною та напрямком);
в шарнірі А (за величиною та напрямком);
l реакція  в шарнірі
в шарнірі  (за величиною та напрямком);
(за величиною та напрямком);
l внутрішні реакції в шарнірі В:  і
і  , які разом із силою утворюють трикутник сил.
, які разом із силою утворюють трикутник сил.
3. Розкладаємо реакції і на нормальні та тангенціальні складові:
 . .
| (5.23) |
 . .
| (5.24) |
Нормальні складові  і
і  спрямовані паралельно відповідно ланкам ВА і ВО2, тангенціальні
спрямовані паралельно відповідно ланкам ВА і ВО2, тангенціальні  і
і  - перпендикулярно до цих ланок.
- перпендикулярно до цих ланок.
4. Для визначення тангенціальної складової складаємо рівняння суми моментів сил ланки ВА відносно т. В:
 .
.
 . .
| (5.25) |
Звідки:
 . .
| (5.26) |
УВАГА!Плечі сил  беремо з креслення, в мм.
беремо з креслення, в мм.
5. Для визначення тангенціальної складової складаємо рівняння суми моментів сил ланки ВО2 відносно т. В:
 .
.
 . .
| (5.27) |
Звідки:
 . .
| (5.28) |
6. Для визначення решти невідомих реакцій складаємо загальне векторне рівняння рівноваги всіх сил, що діють на групу 2-3 (невідомі реакції ставимо по кінцях рівняння):
 . .
| (5.29) |
У відрізках:
 . .
| (5.30) |
7. Будуємо план сил у масштабі , складаючи послідовно сили за рівнянням. Склавши всі відомі сили, з т. проводимо пряму, паралельну ланці  , а з т.
, а з т.  - пряму, паралельну ланці ВА. На перетині отримуємо т.
- пряму, паралельну ланці ВА. На перетині отримуємо т.  .
.
8. З'єднуємо т. і т. . Отримуємо повну реакцію в шарнірі О2:
 .
.
9. З'єднуємо т. і т. . Отримуємо повну реакцію в шарнірі А:
 .
.
10. Для визначення внутрішніх реакцій і у шарнірі В складаємо векторні рівняння рівноваги відповідно ланок 2 і 3:
l для ланки 2 (ВА):
 . .
| (5.31) |
У відрізках:
 . .
| (5.32) |
З'єднавши т. і т. , отримуємо реакцію :


l для ланки 3 (ВО2):
 . .
| (5.33) |
У відрізках:
 . .
| (5.34) |
З'єднавши т. і т. , отримуємо реакцію :
 .
.
У шарнірі В маємо трикутник сил: , і .
Силовий розрахунок початкової ланки
Розглянемо силовий розрахунок початкової ланки в робочій машині та в машині-двигуні.
5.7.1. Силовий розрахунок початкової ланки у робочій машині
У робочій машині (прес, дробарка, насос, завантажник, конвеєр тощо) роль кривошипа виконує останнє зубчасте колесо механізму приводу з закріпленим на ньому пальцем А (рис. 5.11, ж).
1. Для накреслювання зубчастого зачеплення заданої зубчастої пари треба визначити радіуси початкових кіл шестерні та колеса.
Зазвичай задаються такі вихідні дані:
l вид зачеплення (нульове, рівнозміщене, нерівнозміщене);
l модуль зачеплення, мм;
l число зубців шестерні та колеса;
l розташування даної зубчастої пари (горизонтальне, вертикальне, під кутом).
2. Радіуси початкових кіл  (у залежності від виду зачеплення) розраховуються за формулами:
(у залежності від виду зачеплення) розраховуються за формулами:
 - для нульового та рівнозміщеного зачеплень;
- для нульового та рівнозміщеного зачеплень;
 - для нерівнозміщеного зачеплення [5, c. 47; 8, c. 35].
- для нерівнозміщеного зачеплення [5, c. 47; 8, c. 35].
де  - радіус ділильного кола, мм.
- радіус ділильного кола, мм.
3. Накреслюємо зачеплення в тому ж масштабі  , що й групи 4-5 і 2-3 із урахуванням заданого розташування коліс, наприклад, горизонтального (рис. 5.11, ж).
, що й групи 4-5 і 2-3 із урахуванням заданого розташування коліс, наприклад, горизонтального (рис. 5.11, ж).
4. Переносимо на колесо з плану механізму (див. рис. 5.11, а) кривошип ОА.
5. Розглядаємо сили, що діють на початкову ланку:
l сила тяжіння:  ,
,
де  - маса колеса, кг (задається або розраховується за наведеною методикою*);
- маса колеса, кг (задається або розраховується за наведеною методикою*);  - прискорення вільного падіння;
- прискорення вільного падіння;
l у шарнірі А прикладена сила  (перенесена з плану сил групи
(перенесена з плану сил групи
2-3 паралельно та протилежно силі );
l у полюсі  по лінії зачеплення прикладена зрівноважувальна сила
по лінії зачеплення прикладена зрівноважувальна сила
 таким чином, щоб утворювався момент проти моменту сили .
таким чином, щоб утворювався момент проти моменту сили .
Зрівноважувальна сила – це сила, яку треба прикласти до початкової ланки, щоб вона рухалася за заданим законом.
Лінія зачеплення проводиться через полюс під кутом зачеплення  до дотичної
до дотичної  , проведеною до початкових кіл.
, проведеною до початкових кіл.
Кут зачеплення  - для нульового та рівнозміщеного зачеплень; ;
- для нульового та рівнозміщеного зачеплень; ;  - для нерівнозміщеного зачеплення.
- для нерівнозміщеного зачеплення.
6. Для початкової ланки невідомими є:
l зрівноважувальна сила 
l реакція в шарнірі 

7. Зрівноважувальну силу визначаємо з рівняння суми моментів усіх сил, що діють на початкову ланку відносно т. :
 .
.
*Маса зубчастого колеса визначається наступним чином:
 , де , де  - маса вінця колеса, кг; - маса вінця колеса, кг;  , де , де  - діаметр кола западин колеса, м; - діаметр кола западин колеса, м;  - площа поперечного перерізу колеса, м2; - площа поперечного перерізу колеса, м2;  - густина матеріалу колеса (наприклад, чавун); =7100 кг/м3; - густина матеріалу колеса (наприклад, чавун); =7100 кг/м3;  , де , де  - ширина вінця колеса, мм; орієнтовно - ширина вінця колеса, мм; орієнтовно  ; - модуль зачеплення, мм. Діаметр западин ; - модуль зачеплення, мм. Діаметр западин  , де , де  - радіус кола западин, мм, визначається з урахуванням виду зачеплення зубчастої пари: - радіус кола западин, мм, визначається з урахуванням виду зачеплення зубчастої пари:  , де , де  - радіус ділильного кола колеса, мм; - радіус ділильного кола колеса, мм;  , де - число зубців колеса. , де - число зубців колеса.
| ||

| (5.35) | |
Звідки:
 , ,
| (5.36) |
де плечі  ,
,  беремо з креслення в мм.
беремо з креслення в мм.
- радіус основного кола (перпендикуляр, опущений на лінію зачеплення).
8. Для визначення реакції  складаємо векторне рівняння рівноваги початкової ланки:
складаємо векторне рівняння рівноваги початкової ланки:
 . .
| (5.37) |
У відрізках:
 . .
| (5.38) |
9. Будуємо план сил за рівнянням, прийнявши масштаб
(рис. 5.11, з). З'єднуємо т. і т. , отримуємо:
 .
.
Прикладаємо знайдену реакцію на початкову ланку в т. .
5.7.2. Силовий розрахунок початкової ланки в машині-двигуні
У машині-двигуні кривошипний вал і головний вал робочої машини з'єднані за допомогою муфти (це пристрій для з'єднання валів і передачі обертального руху без зміни величини та знака обертового моменту)
У цьому випадку невідомим є зрівноважувальний момент – це момент пари сил, який необхідно прикласти до початкової ланки, щоб вона рухалася за заданим законом.
Нехай маємо ланку з прикладеними до неї силами (рис. 5.12, а) та її план прискорень (рис. 5.12, б).
На початкову ланку діють такі сили:
l у шарнірі А прикладена сила (перенесена з плану сил групи
2-3 паралельно та протилежно силі );

|
| Рис. 5.12: а – початкова ланка; б. – план прискорень; в. – план сил |
l сила тяжіння:  , прикладена в центрі мас ланки
, прикладена в центрі мас ланки  ;
;
де - маса ланки (задається або розраховується за вихідними даними);
l сила інерції ланки:  .
.
Невідомими є:
l зрівноважувальний момент 
l у шарнірі реакція
1. Зрівноважувальний момент  знаходимо з рівняння суми моментів усіх сил, що діють на початкову ланку (УВАГА! Треба враховувати масштаб ):
знаходимо з рівняння суми моментів усіх сил, що діють на початкову ланку (УВАГА! Треба враховувати масштаб ):
.

| (5.39) |
Звідки:
 . .
| (5.40) |
2. Для визначення реакції складаємо рівняння рівноваги початкової ланки:
 . .
| (5.41) |
У відрізках:
 . .
| (5.42) |
3. Будуємо план сил за рівнянням, прийнявши масштаб (рис. 5.12, в). З'єднуємо т. і т. , отримуємо:
 .
.
Теорема М.Є.Жуковського
М.Є.Жуковський – видатний російський вчений в галузі механіки, аеродинаміки та гідродинаміки, теорії авіації. У курсі ТММ розглядаються дві його теореми. Розглянемо одну з них:
Якщо зрівноважену систему сил, що діють на ланки механізму, перенести в однойменні точки повернутого на 900 плану швидкостей механізму, то сума моментів цих сил відносно полюса плану дорівнює нулю.
Доведемо цю теорему (див. рис. 5.13):
1. Нехай маємо механізм  , на ланки якого діють сили
, на ланки якого діють сили  ., що є рівнодіючими всіх сил і прикладені відповідно в т.
., що є рівнодіючими всіх сил і прикладені відповідно в т.  (рис. 5.13,а).
(рис. 5.13,а).
2. На повернутий на 900 план швидкостей у однойменні точки (знайдені за подібністю) переносимо сили (рис. 5.13,б).
3. Для доведення теореми скористаємося принципом можливих переміщень, відомий з курсу теоретичної механіки.
Сума елементарних робіт на можливих переміщеннях дорівнює нулю.
 . .
| (5.43) |
Треба довести, що  .
.
4. Позначимо плечі сил  , а також кути
, а також кути  між векторами швидкостей
між векторами швидкостей  та цими плечами.
та цими плечами.
5. Складаємо рівняння суми моментів усіх сил відносно полюса плану  .
.
Скористаємося поняттям доведення від зворотного, тобто прирівнюємо суму моментів сил не нулю, а деякій величині А, далі треба довести, що  .
.

| ||
Рис. 5.13: До теореми Жуковського: а. – план механізму; б. – план швидкостей, повернутий на 900 |
6. Із плану швидкостей бачимо, що плечі сил , можна виразити таким чином:
 . .
| (5.44) |
7. Якщо помножити всі складові цього рівняння на масштаб  , маємо швидкості точок :
, маємо швидкості точок :
 .
.
або  . .
| (5.45) |
8. Розглянемо, що це за кути . Для цього переносимо вектори швидкостей  на план механізму в точки , повертаючи їх попередньо на кут 900 проти напряму повороту плану швидкостей (рис. 5.13,б). Як бачимо, це кути між векторами сил і векторами швидкостей (два останніх – між їх продовженнями).
на план механізму в точки , повертаючи їх попередньо на кут 900 проти напряму повороту плану швидкостей (рис. 5.13,б). Як бачимо, це кути між векторами сил і векторами швидкостей (два останніх – між їх продовженнями).
9. Помножимо всі частини попереднього рівняння на  ( у лівій частині отримаємо елементарні переміщення точок ), а також урахуємо знаки “cos”:
( у лівій частині отримаємо елементарні переміщення точок ), а також урахуємо знаки “cos”:


| (5.46) |
Примітка: знаки “+” з'явилися за рахунок напрямів швидкостей.
10. Запишемо остаточно рівняння у формі “елементарних переміщень”:

11. У реальному механізмі всі елементарні переміщення є й можливими, отже:  , але
, але  , отже, , що й треба було довести.
, отже, , що й треба було довести.
Контрольні питання до теми 5:
1. Класифікація сил, що діють на ланки механізму.
2. Які сили називаються рушійними?
3. Які сили називаються силами опору?
4. Шо таке сили корисного, шкідливого опору?
5. У чому полягає принцип кінетостатики?
6. Як урахувуються сил інерції при плоскопаралельному русі ланки?
7. Як урахувуються сил інерції при поступальному русі ланки?
8. Як урахувуються сил інерції при обертальному русі ланки навколо центральної осі?
9. Як урахувуються сил інерції при обертальному русі ланки навколо довільної осі?
10. Умови статичної визначуваності кінематичного ланцюга з нижчими парами.
11. Умови статичної визначуваності кінематичного ланцюга з вищими парами.
12. Умови статичної визначуваності просторового кінематичного ланцюга.
13. Визначення реакцій у кінематичних парах груп Ассура 2-го класу.
14. Силовий розрахунок початкової ланки в робочій машині.
15. Силовий розрахунок початкової ланки в машині - двигуні.
16. Що називається зрівноважувальною силою? По якій лінії вона діє?
17. Теорема М.Є.Жуковського.
18. Визначення зрівноважувальної сили за допомогою важеля Жуковського.