
Категории:
АстрономияБиология
География
Другие языки
Интернет
Информатика
История
Культура
Литература
Логика
Математика
Медицина
Механика
Охрана труда
Педагогика
Политика
Право
Психология
Религия
Риторика
Социология
Спорт
Строительство
Технология
Транспорт
Физика
Философия
Финансы
Химия
Экология
Экономика
Электроника
Кинематические цепи и механизмы
Звенья и кинематические пары
Рычажными называются механизмы с геометрическим замыканием (запиранием) звеньев во вращательных и поступательных кинематических парах.
Благодаря этому они могут передавать большие усилия и мощности, чем другие механизмы в аналогичных условиях. Звенья механизмов сравнительно просты в изготовлении.
Механизмы применяют в основном для преобразования вращательного движения входного звена в качательное или возвратно-поступательное движение выходного звена.
Если звенья механизма движутся в одной плоскости, то механизм называется плоским.
Каждый механизм состоит из отдельных звеньев, одно из которых является неподвижным и называется стойкой. Остальные звенья относительно стойки совершают вполне определен-
ные движения.
Звенья механизма в зависимости от их функции в механизме разделяют на входные и выходные, веду!цие и ведомые. Входным называют звено, которому сообщается движение от двигателя, выходным - звено, реализующее движение, для которого и предназначен механизм.
Подвижное соединение двух звеньев образует кинематическую пару. Наибольшее распространение получили кинематические пары, в которых одно звено относительно другого совершает вращательное или поступательное движение. В соответствии с этим пары называют вращательными или поступательными.
Участки звеньев пары, которыми они входят в соприкосновение называют элементами нары. Если соприкосновение происходит по поверхности, то пара называется низшей, а если по линии или в точке, то - высшей. Примерами низших пар могут бы 11. ползун и стойка (неподвижная направляющая), цилиндрический шарнир (вал-и подшипник ) и т.д.
Классы кинематических пар
Определение движения звеньев кинематической пары объясняется ее структурой. Известно, что каждое звено в отдельности имеет 6 степеней свободы, т. е. может получать 6 возможных перемещений в пространстве - три поступательных вдоль координатных осей и три вращательных относительно этих осей (рис.1.1).

Рис. 1.1. Возможные перемещения тела в пространстве
При соединении звеньев в кинематическую пару, каждое из них накладывает на другое ограничения в движении (связи), в результате чего теряется определенное число степеней свободы. По числу связей, наложенных на относительное движение звеньев, кинематические пары делятся на 5 классов.
Наибольшее распространение имеют пары V-го класса (они имеют лишь одну степень свободы): звенья в них могут получать либо врашательное, либо поступательное движение. В парах IV-го класса возможно 2 относительных движения звеньев; например, свободный цилиндрический шарнир (рис. 1.2) имеет две степени свободы - вращательное вокруг оси и поступательное вдоль этой оси.

Рис. 1.2. Кинематическая пара IV класса
В таком же движении находятся звенья всех высших пар (в плоских кинематических цепях) и поэтому они относятся к парам IV-ro класса. Таким образом, пары V-ro класса одноподвижны, пары IV-ro класса - двухподвижны .
Кинематические цепи и механизмы
Совокупность соединенных между собой звеньев и кинематические пары называют кинематической цепью. Кинематические цепи разделяют на разомкнутые и замкнутые, прочие и сложные. Разомкнутая цепь (рис.1.3, а) имеет свободные элементы, к которым могут быть присоединены другие звенья .В замкнутой цепи все звенья образуют замкнутый контур, не имеющий свободных элементов (рис. 1.3,6).
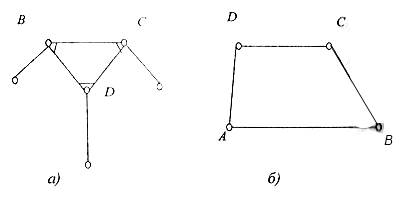
Рис. 1.3. Кинематические цепи: а) - разомкнутая, б) – замкнутая
Простой называют цепь, в которой каждое звено входит в состав не более двух кинематических пар. На рис.1.3,6 звено АН входит в состав двух пар - А и В. Сложная цепь имеет в своем составе базисные звенья, которые включаются в три и более кинематических пар (на рис1.З.а базисным звеном является звено BCD).
В кинематических цепях все звенья подвижны. Если же одно из звеньев закрепить неподвижно, то цепь превращается в механизм. По характеру движения точек звеньев механизма относительно выбранной плоскости кинематические цепи и механизмы разделяют на плоские и пространственные. В плоских цепях и механизмах точки всех звеньев движутся параллельно одной плоскости. Такое движение в рычажных механизмах обеспечивается параллельным расположением осей шарниров. Если же оси шарниров расположены не параллельно, то точки звеньев описывают пространственные траектории, т.е. движутся не параллельно одной плоскости.
Каждый механизм имеет звенья ведущие и ведомые. Ведущее звено, совершающее вращательное движение с поворотом на угол 360 градусов, называют кривошипом (рис. 1.4, а). Звено поступательного движения называют ползуном (рис. 1.4, б). Звено, совершающее качательное движение называют коромыслом (рис 1.4, в):

Рис. 1.4. Звенья механизма: а) - кривошип; б) - ползун 3; в) - когюмысло
Качающееся или вращающееся звено, которое является подвижной направляющей для ползуна, называется кулисой (рис.1.5,а). Звено, совершающее плоскопараллельное движение, называется шатуном (рис. 1.4, б, 1.5,6). Обычно шатун соединяет кривошип и ползун, кривошип и коромысло, кулису и ползун.

Рис. 1.5. Звенья механизма: а) – кулиса; б) - шатун
1.4. Степень подвижности механизма
Число подвижных звеньев, которое необходимо для сообщения ведомым звеньям заданных движений, зависит от структуры механизма, т. е. от числа звеньев и числа кинематических пар различных классов. Эта зависимость отражается структур- ной формулой механизма, определяющей степень подвижности (число ведущих звеньев) в зависимости от его структуры.
Для плоских механизмов формула для определения степени подвижности (формула П.Л.Чебышсва) имеет вид:
W=3n-2р-р, (1.1)
где W-степень подвижности механизма;
n-число подвижных звеньев;
р-число пар V-го класса;
р-чиспо пар 1У-го класса.
Пример. Определить степень подвижности механизма, изображенного на рис. 1.6.

Рис. 1.6. Определение степени подвижности плоского механизма
Решение. Механизм имеет 4 подвижных звена (1, 2, 3, 4),
число пар V-го класса - 5(между звеньями 5-1, 5-2, 2-3,3-4, 5-4),
число пар 1V-го класса - 1 (между звеньями 1-2).
Степень подвижности будет равна W =3*4 – 2*5 - 1 = 1.
Следовательно, для работы механизма необходимо одно ведущее звено. В принципе, ведущим звеном может быть любое звено, например, ползун 4. Однако, чаще всего ведущим звеном является кривошип.
1.5. Условное обозначение звеньев и кинематических пар
Кинематические цепи и механизмы изображают графически в виде схем и планов. Схемой называют изображение звеньев и пар с помощью специально принятых условных обозначений, но без определенного масштаба. План изображает цепь или механизм в принятом масштабе с учетом известных длин звеньев.
Звено рычажного механизма изображают отрезком прямой с кружочками на концах, изображающие элементы для образования вращательных пар (рис. 1.7,а). Звено, совершающее поступательное движение в направляющих (ползун), изображается прямоугольником с элементом вращательной нары (рис 1.7,6). Неподвижное звено (стойка) отмечается штриховкой или изображается равносторонним треугольником со штриховкой (рис1.7,в).

Рис. 1.7. Схематическое обозначение звеньев: а) – звено
вращательного или плоского движения; б) - ползун; в) – стойка
Если звенья присоединяются к стойке, образуя вращательные пары в нескольких местах, удаленных друг от друга, то стойка изображается соответствующим числом треугольников со штриховкой, которая отмечается одним числом.
1.9. Разложение механизма на структурные группы
При выполнении структурного анализа механизма производят его разложение на структурные группы. Разложение начинают с отсоединения крайних групп и заканчивают выделением начального механизма
Образование механизма производится в обратном порядке: к начальному механизму присоединяется первая структурная группа, а затем последующие группы
Порядок присоединения структурных групп при образовании выражается формулой строения механизма.
Объекты выполнении работы - планшеты с моделями рычажных механизмов.