Порядок выполнения работы. 1.Общие сведения. В процессе работы мотовило совместно с жатвенной машиной переме-щается по полю со скоростью vм и вращается относительно своей оси с угловой
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ПОКАЗАТЕЛЯ КИНЕМАТИЧЕСКОГО РЕЖИМА НА КАЧЕСТВО РАБОТЫ МОТОВИЛА
1.Общие сведения. В процессе работы мотовило совместно с жатвенной машиной переме-щается по полю со скоростью vм и вращается относительно своей оси с угловой скоростью w. Траекторией в абсолютном движении планки является циклоида. Показатель кинематического режима мотовила должен быть таким, чтобы срезанные стебли планками мотовила подводились к режущему аппарату. Качество работы мотовила также зависит от его радиуса, расположения центра мотовила по высоте, выноса оси мотовила относительно режущего аппарата. Эти параметры должны выбираться, исходя из высоты и густоты хлебостоя, его полеглости и других свойств растений.
Показатель кинематического режима мотовила определяется выражением:
l = U / vм , (1)
где U - окружная скорость планки, м/с; vм - скорость машины, м/с. Величина l зависит от состояния стеблестоя и скорости машины и может изменяться в широких пределах: 1,3-1,9. Обычно ее принимают равной 1.5-1,7. При l>1,7 планки могут производить повышенное выбивание зерен из колосьев, а при l<1,5 значительная часть стеблей не будет подвергаться воздействию планок.
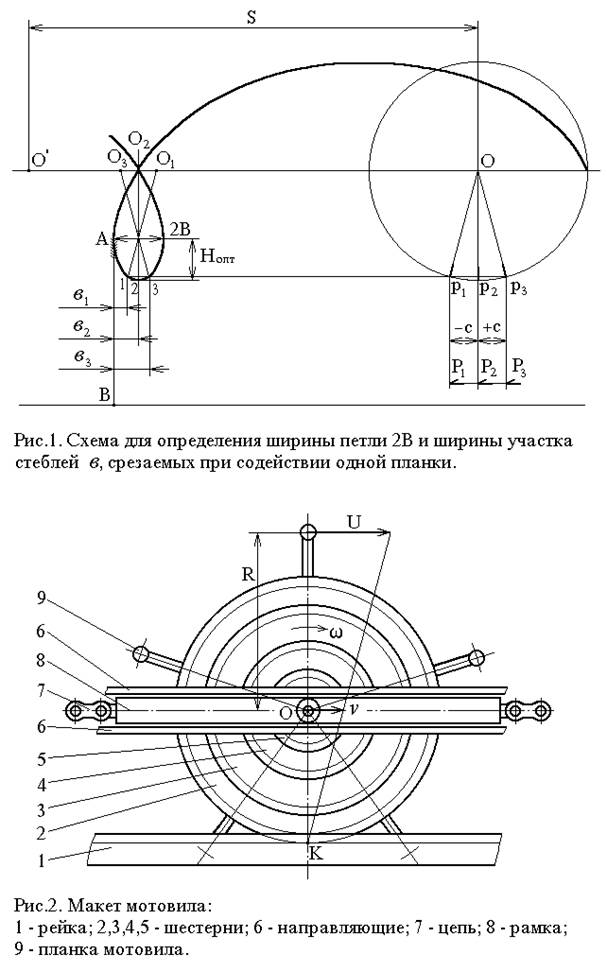
При одном и томже l работа мотовила зависит от выноса его. Вынос с - это расстояние между осью мотовила О и режущим аппаратом Р(рис.1), замеренное по горизонтали. Если ось мотовила О впереди ножа Р3, то вынос положительный, если позади ножа Р1 - вынос отрицательный. Вынос равен нулю, если ось мотовила расположена над ножом Р2. В зависимости от с будет изменяться ширина в участка стеблей, срезаемых при содействии планки. Левая граница (см. рис.1) участка определяется стеблем АВ. Правая граница определяется местоположением режущего аппарата в момент, когда планка будет располагаться над ножом (на одной вертикали с точками 1,2,3 в зависимости от выноса). Для определения этих точек вынос мотовила с откладывают от вертикали, проведенной через ось О. Находят р1, р2 и р3 на траектории относительного движения. Проектируя р1, р2 и р3 на траекторию абсолютного движения, получают точки 1, 2, 3.
Содержание работы.
2.1. Изучить влияние показателя кинематического режима l на процесс работы мотовила.
2.2. Определить степень воздействия мотовила при разных выносах оси.
Порядок выполнения работы.
3.1. Работа выполняется на специальном макете мотовила. В направляющих сварной рамы с помощью цепной передачи перемещается рамка с блоком шестерен, укрепленных на оси мотовила (рис.2). На двух планках имеются патроны для карандаша. Под направляющими находится зубчатая рейка, которая может быть закреплена с любой шестерней блока. С одной стороны рамы закреплена на шарнирах доска для бумаги. При такой конструкции макета показатель l, независимо от скорости перемещения мотовила, остается неиз-менным. Это вытекает из следующего. Мгновенный центр вращения блока шестерен расположен в точке К. Следовательно, линейная скорость центра шестерни (оси мотовила):
v = w (ОК) = w r,(2)
где w - угловая скорость шестерни; r - радиус шестерни. Так как линейная скорость планки
U = wR, то U / v = wR / w r = R / r= l . (3) Таким образом, l не зависит от w, а, следовательно, и от скорости передвижения блока шестерен, а зависит только от радиуса шестерни, которая находится в зацеплении с рейкой, и величины R .