Лекция 5.2. Аппаратные средства поддержки проектирования и отладки систем реального времени. 162 3 страница
Второй вариант расширений реального времени фирмы VenturCom выглядит иначе: здесь сделана попытка "интегрировать" реальное время в Windows NT путем исследования причин задержек и зависаний и устранения этих причин с помощью подсистемы реального времени. Решения фирмы "VenturCom" (RTX 4.2) базируются на модификациях уровня аппаратных абстракций Windows NT (HAL - Hardware Abstraction Layer) - программного слоя, через который драйверы взаимодействуют с аппаратурой. Модифицированный HAL и дополнтельные функции (RTAPI) отвечают также за стабильность и надежность системы, обеспечивая отслеживание краха Windows NT, зависания приложений или блокировку прерываний. В состав RTX входит также подсистема реального времени RTSS, с помощью которой Windows NT расширяется дополнительным набором объектов (аналогичным стандартным, но с атрибутами реального времени). Среди новых объектов -нити (потоки, процессы) реального времени, которые управляются специальным планировщиком реального времени (256 фиксированных приоритетов, алгоритм - приоритетный с вытеснением). Побочным результатом RTX является возможность простого создания программ управления устройствами, так как среди функций RTAPI есть и функции работы с портами ввода-вывода и физической памятью. Решения VenturCom характерны еще и тем, что они предоставляют для NT возможность конфигурирования Windows NT и создания встроенных конфигураций (без дисков, клавиатуры и монитора, интегратор компонентов - CI).
Несмотря на всю неоднозначность отношения традиционных пользователей систем реального времени ко всему, что связано с "Microsoft", необходимо констатировать факт: появился новый класс операционных систем реального времени - а именно расширения реального времени для Windows NT. Результаты независимых тестирований этих продуктов показывают, что они могут быть в перспективе использованы для построения систем жесткого реального времени после соответствующей доработки. Область применения расширений реального времени - большие системы реального времени, где требуется визуализация, работа с базами данных, доступ в Интернет и пр.
Контрольные вопросы:
1. Дайте определение системам реального времени.
2. Приведите примеры, где требуются системы реального времени. Перечислите основные области применения систем реального времени.
3. Какие предъявляются требования к системам реального времени?
4. Перечислите основные признаки систем жесткого и мягкого реального времени.
5. Какие типичные времена реакции на внешние события в процессах, управляемых системами реального времени?
6. Какие требования предъявляются к операционным системам реального времени?
7. Дайте характеристику аппаратурной среды систем реального времени.
8. Дайте характеристику понятию «процесс».
9. Дайте характеристику понятию «ресурс». Какая классификация ресурсов Вам известна?
10. Дайте характеристику понятию «виртуальная память».
11. Что понимается под межпроцессным взаимодействием?
12. Какие наиболее распространенные формы взаимодействия процессов Вам известны?
13. Дайте характеристику понятию «событие».
14. Как связаны между собой понятия «задача» и «процесс»?
15. Дайте характеристику статическому и динамическому связыванию.
16. Какие типы задач систем реального времени Вы знаете? Охарактеризуйте их.
17. Какие классы систем реального времени Вам известны?
18. Дайте характеристику исполнительным системам реального времени.
19. Охарактеризуйте класс систем реального времени «ядра реального времени».
20. Охарактеризуйте класс систем реального времени «UNIX,ы реального времени».
21. Дайте характеристику расширениям реального времени для Windows NT.
Тема 2. Устройства связи с объектом
Лекция 2.1. Методы и средства обработки асинхронных событий
1. Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом.
2. Средства обработки асинхронных событий.
3. Принципы функционирования интерфейса.
4. Программное обеспечение интерфейса.
5. Аппаратные средства интерфейса.
1. Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом
Из всего состава функциональных устройств СРВ, образующих информационный тракт системы, рассмотрим только те, которые осуществляют функции сбора, предварительной обработки, представления, передачи и обработки информации. Блок-схема обобщенной функциональной структуры информационного тракта и устройства связи с объектом представлены на рис. 1.
На вход системы поступает в общем случае аналоговый сигнал S(t), сформированный информационным устройством (или датчиком), являющимся источником данных. Сигнал S(t) рассматривается как реализация случайного процесса. Цепь преобразования данных одного устройства (или датчика) в многоканальной системе образует измерительный канал.
В блоке подготовки сигнал подвергается предварительной аналоговой обработке – согласованию, усилению (приведение амплитуды к динамическому диапазону устройством выборки и хранения – УВХ), полосовой фильтрации (ограничение полосы частот сигналов для корректной оцифровки).
Поскольку подсистема обработки является цифровой системой, то каждый сигнал подвергается процедуре аналого-цифрового преобразования в модуле АЦП. Последовательность отсчетов от различных измерительных каналов объединяется в общий поток для последующего ввода в компьютер или передачи по каналу связи. В ряде случаев могут применяться устройства сжатия данных (либо сжатие осуществляется после ввода данных в компьютер – программные методы сжатия). Состав и последовательность расположения функциональных устройств в различных СРВ может отличаться от приведенной в блок-схеме. Но, характерным является наличие данных устройств, как типовых в системах различного назначения и технического воплощения.
Подсистема передачи включает кодер и декодер канала связи, передающее и приемное устройства и собственно канал связи (среда с антенными устройствами). Кодер и декодер осуществляют помехоустойчивое кодирование и декодирование сигналов с целью дополни дополнительной защиты передаваемых сообщений от помех в канале связи и могут отсутствовать при наличии качественного канала.
Восстановление исходного аналогового сообщения по цифровым отсчетам с допустимой погрешностью производится на приемной стороне. В современных системах восстановление непрерывного сообщения, как правило, не выполняется, поскольку регистрация, хранение и обработка информации выполняются в цифровом виде, но принципиальная возможность восстановления предусматривается.
Одна из задач подсистемы цифровой обработки, которая выполняется с использованием ресурсов компьютера и специализированных процессоров цифровой обработки – сортировка информации и отбраковка аномальных результатов наблюдений. Отбраковка является частным случаем более общей задачи – фильтрации сигналов от помех или использования методов распознавания образов. Другими задачами подсистемы обработки являются:
предварительная обработка данных (сглаживание, удаление тренда);
статистическая обработка сигналов (применяются различные алгоритмы в зависимости от назначения СРВ);
спектральная обработка;
формирование моделей процессов и явлений;
представление результатов предварительной обработки или анализа;
хранение данных.
Исходная информация для последующего анализа исследуемого явления (или объекта) формируется с помощью средств проведения эксперимента, представляющих собой совокупность средств измерений различных типов (измерительных устройств, преобразователей, датчиков и принадлежностей к ним), каналов передачи информации и вспомогательных устройств для обеспечения условий проведения эксперимента. В различных предметных областях совокупность средств для проведения эксперимента может называться по-разному (например, экспериментальная установка, информационно-измерительная система, измерительная система). В дальнейшем будем пользоваться термином "измерительная система" (ИС). В зависимости от целей эксперимента иногда различают измерительные информационные (исследование), измерительные контролирующие (контроль, испытание) и измерительные управляющие (управление, оптимизация) системы, которые различаются в общем случае как составом оборудования, так и сложностью обработки экспериментальных данных.
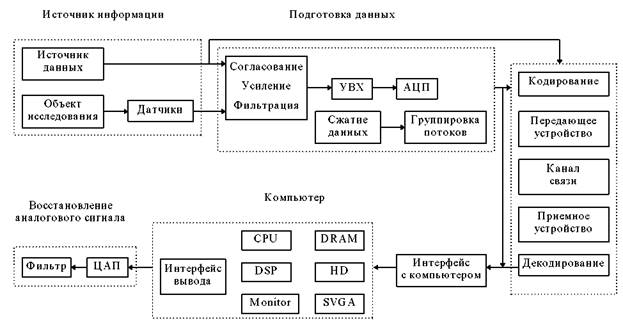
Рисунок 1. - Обобщенная блок-схема функциональной структуры информационного тракта и устройство связи с объектом
2. Средства обработки асинхронных событий
Состав средств измерений, входящих в измерительную систему и выполняющих функции датчиков сигналов, формирователей воздействий на исследуемый объект, в существенной степени определяется задачами эксперимента, которые ставятся при его планировании. То же самое можно сказать и о предварительном выборе методов обработки экспериментальных данных, которые могут в дальнейшем уточняться по мере получения экспериментальной информации об объекте исследования и условиях проведения эксперимента.
В связи с возрастанием сложности экспериментальных исследований (это проявляется в увеличении числа измеряемых величин, большом количестве информационных каналов, повышении требований к качеству регистрируемой информации и оперативности ее получения) в состав современных измерительных систем включаются вычислительные средства различных классов. Эти средства (мини-ЭВМ, персональные компьютеры, специализированные вычислители и контроллеры) не только выполняют функции сбора и обработки экспериментальной информации, но и решают задачи управления ходом эксперимента, автоматизации функционирования измерительной системы, хранения измерительных данных и результатов анализа, графической поддержки режимов контроля, представления и анализа.
Таким образом, современные средства проведения эксперимента представляют собой измерительно-вычислительные системы или комплексы, снабженные развитыми вычислительными средствами (в последнее время все чаще многопроцессорные). При обосновании структуры и состава ИС необходимо решить следующие основные задачи:
определить состав измерительного оборудования (датчики, устройства согласования, усиления, фильтрации, калибровки);
выбрать тип и характеристики компьютера, входящего в состав ИС (сейчас, как правило, персональный компьютер);
выбрать тип оборудования, выполняющего сбор данных и цифровую
обработку сигналов;
адаптировать каналы связи между компьютером, оборудованием сбора данных (интерфейс), измерительными устройствами и потребителем информации;
разработать программное обеспечение ИС.
При выборе компьютера необходимо учитывать требования по оперативности получения результатов экспериментов, сложность алгоритмов обработки экспериментальных данных и объем получаемой информации. Это позволит оценить требуемую производительность процессора, емкость и характеристики ОЗУ и жестких дисков, характеристики видеосистемы.
Известно два подхода к обеспечению ввода аналоговых измерительных сигналов для последующей обработки с использованием цифровых методов. Первый подход основан на применении специализированных комплексных систем, в состав которых входит аппаратура аналого-цифрового преобразования, микропроцессорные средства цифровой обработки и устройства отображения информации. Второй подход основан на применении интерфейсных устройств сбора данных и универсальных компьютерных систем.
Примером специализированной системы является многоканальный анализатор сигналов SA 3550 фирмы Brüel & Kjær. Данный прибор выполняет следующие функции:
анализ сигналов и систем (механических, электрических, электромеханических);
структурные и модальные испытания с несколькими входами и выходами с помощью случайных сигналов и испытания с учетом собственных мод колебаний;
отыскание неисправностей механических систем и их компонент с возможностью изменения форм операционных деформаций;
анализ сервомеханизмов и сервосистем;
анализ и испытания в программах контроля качества;
анализ акустических и электроакустических систем;
измерения и анализ интенсивности звука;
исследования в целях борьбы с шумом.
Другим примером специализированной системы является многоканальный спектральный анализатор SI 1220 фирмы Schlumberger Technologies. Данный прибор позволяет выполнять многоканальный мониторинг конструкций, исследование резонансных явлений, структурный анализ, тестирование и балансировку машинного оборудования, частотный анализ сигналов и нелинейных цепей, исследование речи.
К недостаткам такого подхода построения измерительных систем можно отнести: ограничения на количество входных сигналов и их характеристики; жесткая структура алгоритмов обработки, не допускающая разработку программ анализа под конкретную задачу; ограниченные возможности графического представления результатов; высокая стоимость измерительных систем.
Второй подход основан на применении дополнительных интерфейсных модулей и цифровых процессоров сигналов в составе персонального компьютера. Существенными преимуществами второго подхода являются: гибкость измерительной системы при реализации различных алгоритмов обработки; функциональная полнота системы (решаются задачи ввода данных, обработки, управления, анализа, хранения измерительных данных и результатов анализа); хорошие метрологические характеристики и возможность тиражирования разработанных систем.
Перспективной является тенденция построения ИС на базе типовых микропроцессорных средств, что обеспечивает массовость их применения. Стратегия создания таких систем состоит в объединении регистрирующих датчиков, аппаратуры сбора данных и цифровой обработки сигналов, а также средств программного обеспечения в единую информационную систему.
Большое значение для рассматриваемых ИС имеют обеспечение функциональной гибкости в части управления, выбора метода исследования и развитый пользовательский интерфейс. Для реализации таких свойств разрабатывается мощная полиэкранная графическая поддержка с использованием популярных в последнее время объектной метафоры и комбинированных методов представления информации (текст, графика, звук, видео).
Целевое назначение рассматриваемых ИС связано с регистрацией, обработкой и анализом данных физических и инженерных измерений, а также созданием баз экспериментальных данных для исследования методов информационного обеспечения измерительных задач.
В качестве базового элемента ИС может быть выбран ПК с процессором i486 или Pentium с шиной стандарта ISA (или ISA/PCI). К дополнительному оборудованию ИС следует отнести (рис.2.):

Рисунок 2. - Блок-схема измерительной системы
датчики физических параметров;
блок подготовки аналоговых сигналов (усиление, полосовая фильтрация);
интерфейсные средства ввода-вывода аналоговых сигналов (модули АЦП и ЦАП);
модуль цифрового процессора сигналов.
Элементы системы связаны между собой на физическом и (или) логико-функциональном уровне.
Ввод данных в ИС реализуется аппаратными средствами подсистемы сбора данных, а управляет процессом сбора пользователь, используя экранные формы интерфейса.
Структура ИС, приведенная на рис. 2, обеспечивает выполнение следующих основных задач:
автоматизированный синхронный ввод в ПК сигналов, регистрируемых группой датчиков;
вывод аналоговых сигналов в соответствии с аналитической моделью (например для калибровки);
обработка записанных на жесткий диск данных с помощью методов цифровой обработки сигналов (ЦОС) для изучения состояния физических объектов и исследования протекающих процессов;
графическое представление регистрируемой информации и результатов анализа;
хранение экспериментальных данных и результатов обработки.
Частотный диапазон сигналов, количество параллельных информационных каналов и динамический диапазон сигналов на входе определяют технические требования к системе. Технические требования являются основными исходными данными при выборе структуры измерительной системы (ИС) и разработке алгоритмов ввода многоканальных аналоговых сигналов в персональный компьютер. Типовые требования к ИС:
количество синхронных входных каналов 16;
частотный диапазон входных сигналов 10-30000 Гц;
разрядность АЦП/ЦАП 12-16 бит;
время преобразования АЦП 2.5-10 мкс;
порт ввода – вывода 8 бит ТТЛ;
динамический диапазон по входу 60-80 ДБ.
Программное обеспечение должно выполнять следующие функции:
настройка параметров и запуск процедуры сбора данных;
запись собираемых данных в оперативную память или на жесткий диск с отображением характера регистрируемых сигналов и временного изменения параметров на экране дисплея;
графический пользовательский интерфейс со средствами функциональной помощи;
реализация вычислительных алгоритмов цифровой обработки сигналов с отображением результатов комбинированными средствами представления информации;
выполнение калибровки передаточных характеристик физико-информационных преобразователей и аналоговых цепей;
поддержка базы экспериментальных данных о характеристиках объектов испытаний.
При разработке программного обеспечения используются следующие принципы: модульность, использование объектной метафоры в управлении, унификация связей, разделение программ управления, графической поддержки, обработки и доступа к базе данных.
3. Принципы функционирования интерфейса
Существует несколько методов реализации интерфейса АЦП – процессор ПК.
Схема “самых последних данных”. В этом методе реализации интерфейса АЦП работает непрерывно. В конце каждого цикла преобразования он обновляет данные в выходном буферном регистре и затем автоматически начинает новый цикл преобразования. Микропроцессор просто считывает содержимое этого буфера, когда ему нужны самые последние данные. Этот метод подходит для тех применений, где необходимость в обновлении данных возникает лишь от случая к случаю.
Схема “запуска-ожидания”. Микропроцессор инициирует выполнение преобразования каждый раз, когда ему нужны новые данные, и затем непре-
рывно тестирует состояние АЦП, чтобы узнать, закончилось ли преобразование. Зафиксировав конец преобразования, он считывает выходное слово преобразователя. В возможной модификации этого метода микропроцессор находится в состоянии ожидания в течение интервала времени, превышающего предполагаемое время преобразования, и затем считывает выходные данные. Этот метод несколько проще в реализации, но при этом микропроцессор отвлекается от выполнения всех других программ на время преобразования.
Использование прерывания микропроцессора. Этот метод основан на возможности использования системы прерываний микропроцессора. Как и в предыдущей схеме, процессор или таймер запускают преобразователь, но затем микропроцессор может продолжать выполнение других заданий. Когда преобразование завершено, АЦП вызывает прерывание микропроцессора. Микропроцессор прекращает выполнение текущей программы и сохраняет всю необходимую информацию для последующего восстановления этой программы. Затем он осуществляет поиск и использование ряда команд (обслуживающая программа – обработчик прерывания), предназначенных для выборки данных от АЦП. После того как обслуживающая программа выполнена, микропроцессор возвращается к выполнению исходной программы.
Задача поиска обслуживающей программы иногда решается путем выполнения другой программы (программы или процедуры последовательного опроса – поллинга), которая определяет источник прерывания путем последовательной проверки всех возможных источников. Гораздо эффективнее подход, связанный с использованием векторных прерываний. Этот подход основан на хранении адресов отдельных обслуживающих программ в заранее определенной области памяти, называемой векторной таблицей. В ответ на сигнал прерывания микропроцессор теперь обращается к определенной ячейке памяти, в которую пользователем занесен адрес соответствующей обслуживающей программы. Реальная эффективность этого метода проявляется в системах с большим числом источников прерываний, как в случае IBM PC. В таких системах, как правило, используется специальное устройство, называемое контроллером прерываний. Контроллер прерываний, например Intel 8259А (другие семейства микропроцессоров имеют эквивалентные устройства), организует различные приходящие сигналы прерываний в приоритетные очереди (выстраивает в порядке их значимости), посылает сигнал прерывания в микропроцессор и указывает ему на нужную ячейку в векторной таблице.
4. Программное обеспечение интерфейса
Передача данных между АЦП и микропроцессором на программном уровне может быть организована тремя способами.
Передача через пространство основной памяти. При распределении памяти АЦП присваивается некоторый адрес в пространстве основной памяти, не используемый для фактического хранения данных и программ. Передача данных между АЦП и микропроцессором осуществляется путем обращения к АЦП просто как к ячейке памяти с данным адресом. Однако помимо уменьшения полезного пространства памяти такой подход может привести к усложнению управления памятью и, как правило, требует использования дополнительных аппаратных средств дешифрации адреса, поскольку при минимуме этих средств, слишком расточительно используется память.
Передача через пространство подсистемы ввода – вывода (ВВ). В некоторых системах создается отдельный набор адресов для подсистемы ВВ (пространство ВВ), которые могут совпадать по численным значениям с адресами ячеек основной памяти, но отличаются от них с помощью использования специальных управляющих сигналов (IOR и IOW), выдаваемых на системную шину PC. Отделение пространства памяти от пространства ВВ улучшает характеристики системы. Как правило, это позволяет довольно просто осуществлять дешифрацию адреса с использованием минимального количества аппаратных средств, поскольку “приносится в жертву” пространство ВВ, а не очень ценное пространство основной памяти.
Прямой доступ к памяти (ПДП). Если возникает необходимость только в простой передаче данных между памятью и каким-либо периферийным устройством, включение в интерфейс регистра - аккумулятора микропроцессора неоправданно уменьшает скорость передачи данных. Используя дополнительные аппаратные средства, обычно в виде специального устройства, называемого контроллером ПДП, можно осуществлять непосредственную передачу данных с гораздо большей скоростью. Большинство микропроцессоров допускает реализацию ПДП путем передачи управления системной шиной на определенный промежуток времени контроллеру ПДП. Контроллер ПДП в течение этого промежутка времени управляет работой шины (захватывает шину) и обеспечивает передачу данных путем генерации соответствующих адресов и управляющих сигналов. Затем управление системной шиной передается обратно микропроцессору. Для передачи всех данных может потребоваться несколько таких ПДП-циклов. ПДП эффективен в тех применениях, где нужно обеспечить высокую скорость передачи данных или нужно передавать большие объемы данных. Применение этого метода в системах сбора данных в принципе возможно, но характерно только для систем с высокими рабочими параметрами. На системной плате PC имеется восьмика-нальный контроллер ПДП, который выполняет некоторые системные функции, включая регенерацию памяти и обмен информацией с диском.
5. Аппаратные средства интерфейса
Характер использования аппаратных средств в сильной степени зависит от того, в какой форме представляются данные – в последовательной, или в параллельной.
Параллельная форма представления данных. Аппаратные средства параллельного интерфейса почти всегда включают буфер с тремя состояниями (тристабильный буфер), через который АЦП подключается к шине данных микропроцессора. Дешифрованный адрес и вырабатываемый микропроцессором управляющий сигнал (строб) чтения используются для отпирания этого буфера и передачи данных от АЦП к микропроцессору. Тот же самый адрес и вырабатываемый микропроцессором управляющий сигнал записи используются для запуска преобразователя. В общем случае, наличие отдельных управляющих сигналов чтения и записи необязательно, но такой подход позволяет использовать один и тот же адрес при передаче команд к АЦП и считывании данных с выхода АЦП.
В большинстве АЦП нового поколения тристабильные буферы вместе со своими управляющими схемами находятся на самом кристалле. Такие АЦП можно непосредственно подключать к шине данных микропроцессора. Для сопряжения этих устройств с процессором пользователь должен только обеспечить дешифрованный адрес и ввести несколько логических элементов для согласования управляющих сигналов.
Последовательная форма представления данных. Последовательная форма представления данных естественна для систем, в которых используется последовательная передача данных на большие расстояния к станциям контроля (диспетчерским станциям). По экономическим показателям исключительно эффективным средством реализации такой передачи данных является асинхронная последовательная передача с использованием специализированных или телефонных линий с модемами на каждом конце линии. Аппаратные средства интерфейса со стороны микропроцессора, обычно находящегося на станции контроля, чаще всего представлены в виде специального устройства, называемого универсальным асинхронным приемопередатчиком (УАПП). УАПП принимает и передает данные в последовательной форме, но обменивается этими данными с микропроцессором через параллельный интерфейс. Для каждого микропроцессора имеется, по меньшей мере, один совместимый с ним УАПП. Интерфейс на том конце линии передачи, где находится АЦП, в сильной степени зависит от выбора АЦП, и его лучше всего рассматривать отдельно в каждом конкретном случае. Наблюдается тенденция к размещению большинства обеспечивающих интерфейс схем на самом кристалле АЦП.
Cопряжение 10- или 12-разрядного АЦП с 8-разрядной шиной данных довольно просто решается путем передачи данных порциями по 8 бит (1 байт) одна за другой. Этот способ пригоден как для параллельного, так и для последовательного интерфейсов.
Лекция 2.2. Управление задачами
1. Переключение контекста.
2. Прерывания.
1. Переключение контекста
Рассмотрим сущность понятия «переключение контекста».
Контекст задачи- это набор данных, задающих состояние процессора при выполнении задачи. Он обычно совпадает с набором регистров, доступных для изменения прикладной задачи. В системах с виртуальной памятью может включать регистры, отвечающие за трансляцию виртуального адреса в физический (обычно доступны на запись только операционной системе).
Переключение задач - это переход процессора от исполнения одной задачи к другой. Может быть инициировано:
1. Планировщиком задач (например, освободился ресурс и в очередь готовых задач попала ожидавшая его приоритетная задача),
2. Прерыванием (аппаратным прерыванием, например, запрос на обслуживание от внешнего устройства),
3. Исключением (программным прерыванием, например, системный вызов).
Поскольку контекст полностью определяет, какая задача будет выполняться, то часто термины «переключение задач» и «переключение контекста» употребляют как синонимы.
Диспетчер (dispatcher) - это модуль (программа), отвечающий за переключение контекста.
При переключении задач диспетчеру необходимо: 1) корректно остановить работающую задачу, для этого необходимо: а) выполнить инструкции текущей задачи, уже загруженные в процессор, но еще не выполненные (современные процессоры имеют внутри себя конвейеры инструкций, куда могут загружаться более 10 инструкций, некоторые из которых могут быть сложными, например, записать в память 32 регистра), обычно это делается аппаратно;
б) сохранить в оперативной памяти регистры текущей задачи;
2) найти, подготовить и загрузить затребованную задачу (обработчик прерываний - в этом случае требуется еще установить источник прерывания);
3) запустить новую задачу, для этого:
а) восстановить из оперативной памяти регистры новой задачи (сохраненные ранее, если она до этого уже работала);
б) загрузить в процессор инструкции новой задачи (современные процессоры начинают выполнять инструкции только после загрузки конвейера), эта фаза делается аппаратно.
Каждая из этих стадий вносит свой вклад в задержку при переключении контекста. Поскольку любое приложение реального времени должно обеспечить выдачу результата в заданное время, то эта задержка должна быть мала, детерминирована и известна. Это число является одной из важнейших характеристик ОСРВ.
2. Прерывания
Прерывания являются основным источником сообщения внешним устройствам о готовности данных или необходимости передачи данных. По самому назначению систем реального времени, прерывания являются одним из основных объектов в ОСРВ.
Время реакции на прерывание - это время переключения контекста от текущей задачи к процедуре обработки прерывания. В многозадачных системах время ожидания прерывания (события) может быть использовано другой задачей. Прерывание может произойти во время обработки системного вызова и во время критической секции.