Настройка параметров в полете
Тонкая настройка параметров ArduCopter
( Один из лучших, созданных пользователем гидов тюнинга является DaveC, здесь . Вы можете начать там )
Если вы используете другую раму, не из официального комплекта ArduCopter, вам возможно, потребуется изменить некоторые настройки PID (ПИД означает пропорционально-интегрально-производная и является стандартным методом управления. Вы можете узнать больше об этом здесь ). Полный путеводитель по ПИД находится в нижней части этой страницы.
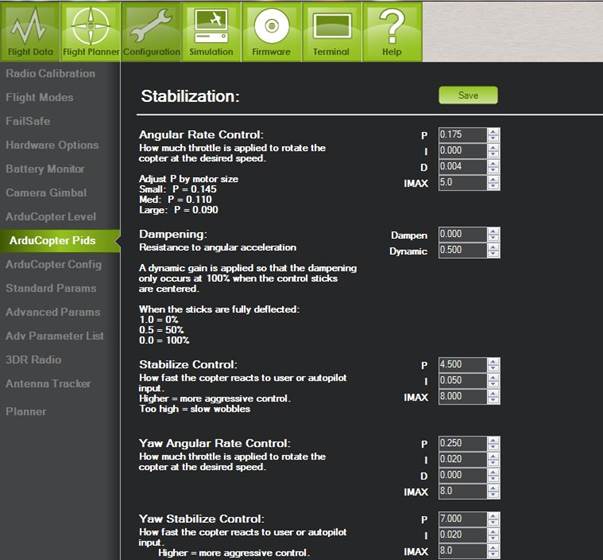
Вы можете настроить PID, в интерактивном режиме в закладке «Конфигурация» Mission Planner. Начните с «ArduCopter Pids», которая содержит наиболее важные настройки и дает инструкции, как использовать их. Дополнительные настройки конфигурации можно найти в Standard Params и Advanced Params, если это будет необходимо
Основные неполадки
Помните две вещи:
- Начните с Stabilize режима для настройки, если коптер не летает правильно в Stabilize он не будет правильно летать в любом из других режимов!
- Первоначально используйте значения по умолчанию! Вы не должны отклоняться очень далеко от значений по умолчанию, которые загружаются с прошивкой, если у вас необходимость изменять их то используйте малые приращения и по одному. Если вы должны использовать значение, которое очень отличается от дефолтного, то либо что-то еще не так или ваш коптер очень сильно отличается от всех остальных.
Для нормального полета, нужно в действительности заботиться только об одном параметре, и это Настройка Управления Скоростью Р(Rate Control P). Используйте метод «настройки в полете» (in-flight tuning) на канале передатчика CH6 чтобы настроить его в течение нескольких секунд. Настройте так «агрессивно», как сможете, прежде чем коптер начнет колебаться. Вы получите большую скорость убывания вниз, если этот параметр будет выше. Вы можете настроить его ниже, если вам нравится более мягкий ответ.
Вот пример: настройка по умолчанию для Rate Control P =0.1750. Это оптимизирован для стандартной Jdrones/3DR Quadcopter с 850 двигателями и 10 " пропами. Однако, если вы используете большие 880 двигатели и 12" пропеллеры, которые являются гораздо более мощным, такой Rate Control P будет слишком агрессивными и ваш коптер окажется довольно неустойчивым. Так что в этом случае Rate Control P до 0,15 или даже 0,1, и вы должны увидеть гораздо более устойчивый полет.
То же самое верно для удержаниевысоты(Altitude hold).Rate Control P нуждается в корректировке, чтобы получить оптимальную производительность удержания высоты.
Эти два параметра ведут по долгому пути, чтобы сделать Ваш вертолет работающим хорошо, и сильно зависят от тяжести вашего вертолета. Больше тяга = более низкие приросты.
- Мой коптер колеблется быстро (малейшие движения), когда стабилизирован :Снизьте усиление (gain?) в Rate Control P.
- Мой коптер колеблется медленно (более крупные движения), когда стабилизированные : Снизьте усиление (gain?) вStabilize Control P.
- Мой коптер получается шатким при быстром спуске: Поднимите выигрыш в в Rate Control P. Можно настроиться более-менее, но не всегда возможно чтобы спускаться на ваших пропах без некоторых колебаний.
- Мой коптер слишком вял : Поднимите значение Stabilize Control P. Эти позволит коптеру быстрее реагировать на угловые ошибки.
- Мой коптер крутит вправо или влево на 15 °, когда я взлетаю : Ваши моторы не установлены прямо (с выкосом) или ваши ESC не калиброванные. Регулируйте по вертикальной оси моторы, пока они не станут строго вертикальными прямыми. Запустите процедуру калибровки ESC.
- Мой коптер наклоняется назад в противоположном направлению полета после полете вперед : Поднимите ваш выигрыш в Stabilize Control P.
- После агрессивнойполета мой коптер наклоняется в одну сторону 10 - 30 °: Делайте то, что может удалить вибрации и изолировать APM. Вы даже можете попробовать и прикрепить небольшой утяжелитель к АРМ, чтобы он меньше вибрировал. Кроме того, можно попытаться приземлиться в течение нескольких секунд, а затем продолжить полет, это даст APM шанс возобновить работу без вибраций.
- Мой коптер не может оставаться совершенно неподвижно в воздухе : Выполните команду калибровки уровня на плоской поверхности. (Дизармить двигатели в течение 15 секунд, чтобы приступить.) Вы также можете взлететь в режиме авто-тюнинга в безветренную (очень важно!) погоду. Любой ветер вызовет изменения, которые будут потом работать против вас, когда коптер повернется на 180 °. Вы можете использовать ваш шаг питч и ролл триминг, но не забудьте повторно отцентровать их обратно, после окончания работы с инструментами конфигурации настройки радио. Использовани тримминга может иметь негативное влияние в SIMPLE режиме, когда происходят повороты. Никогда не делайте тримминг по Yaw., Ваш коптер может начать вращаться на его собственное усмотрение.
- Мой коптер летает хорошо, но иногда работа моторов прерывается при зависании : Ваш двигатель может иметь плохой контакт в разъемах между двигателем и ESC. Вибрация от или несбалансированной ВМГ может сделать контакты подключения на мгновение непрочными, что приводит к остановке двигателя. Двигатель с плохими подшипниками могут потреблять больше энергии для раскрутки. ESC может отключаться, чтобы защитить себя. Или это может случаться если летать достаточно медленно, чтобы тормозить двигателем. Прикрепите датчик тока между аккумулятором и двигателем и проверить разницу между хорошим двигателем и плохим. Если вы видите высокую разницу в потреблении в плохом, заменить его или исправте.
- В режиме Loiter, мой вертолет постоянно проскакивает : Попробуйте и увеличить Nav_P. Вы можете также настроить вниз I, потому что в некоторых случаях, Nav_I или Loiter_I может быть причиной промахов. Выставьте значение I в 0, когда безветренную погоду является лучшим способом для настройки Nav_P.
- Мой режим удержания высоты (Alt hold) в районе 10 (3м) футов по точности составляет лишь около 1-2м : Это на самом деле лучшее, что вы можете достичь. Бародатчик чувствителен к свету и ветру. Используйте фетровую крышку для защиты от ветра и убедитесь, что вы не загерметизировали отверстия датчика.
- Мой коптер сильно раскачивается вверх и вниз в Alt hold . Это в конечном итоге может привести к падения на землю: Ваш THROTTLE_P слишком высокий или низкий. Вам не нужно большое значение P, чтобы сделать удержание высоты. Подумайте о том, на сколько вы можете двигать стик газа, чтобы держать высоту. Не так много! Это то, что вам нужно с Р. I будет возрастать пока ваша батарея разрядится, прежде чем восполнит разницу.
- Я установил сонар, но я не могу заставить его работать . Ваш сонар может страдать от наводок электрических шумов от ESC. Обязательно переместите его на несколько дюймов от любых ESC и попробуйте экранированный кабель, если это возможно. Если на улице холодно, ваш сонар может перестать работать.
- Мой коптер зависает на месте, вращаясь по часовой или против часовой стрелки вокруг : Отрегулируйте магнитное склонение компаса, пока коптер не перестанет кружить.
Настройка параметров в полете
Вы можете настроить параметры в полете в Mission planner (необходимо обеспечить телеметрическую связь или использовать кабель USB) или использовать регулятор подстройки (аналоговая крутилка) на передатчике (Tx) настроенную на канал 6 (CH6) (необходимо иметь дополнительный свободный канал на вашем передатчике, который управляется регулятором или слайдером) для использования функции тонкой настройки CH6, вы можете использовать любой свободный канал на передатчике но он должен быть подключен к ко входу канала СН6 на контролере АРМ.)
Способ 1: (см. также Метод 2)
Выберите вкладку «ArduCopter Configuration " в Mission Planner, и выберите опцию CH6, которую вы хотели бы настроить. например CH6_RATE_KP.
Начиная с МП v1.1.44 и выше, значение наибольшей и наименьшей величины параметра может быть выставлено в поле рядом с выбором режима канала Ch6. В качестве альтернативы можно также изменить параметры TUNE_HIGH и TUNE_LOW в левой панели «Configuration > Adv Parameter List».
Введите верхний и нижний пределы параметра который Вы хотите настроить, выберите значение + и - вокруг 30-40% от значения умолчанию (так для CH6_RATE_KP установить "нижний" в 0,100 и "верхний" в 0,180 от значения по умолчанию из 0,140)
Затем нажмите кнопку "Write Params '. Для проверки значения нажмите «Refresh Params», введенные верхние и нижние границы должны быть правильно отображены и в закладке Список параметров (Parameter List tab параметры TUNE_HIGH & TUNE_LOW) и в полях ввода параметров.
Чтобы проверить, что значения меняются: покрутите крутилку или слайдер на передатчике и нажмите «Refresh Params», значение должно быть отображено в центральной панели в соответствующем окне, покрутите снова и нажмите «Refresh Params», значение должно будет измениться. В качестве альтернативы перейти на вкладку Терминал (Terminal), введите «test» на, а затем «tune» и ваши величины будет прокручиваться вниз в окне, при вращении крутилок или слайдера, значения должны изменяться.
Теперь установить назначенную на передатчике под канал CH6 крутилку или слайдер в положение между 0 и 25%, затем тщательно произведите тесовый полет,приземлитесь и подстройте параметр по новой и снова сделайте тестовый полет.
Чтобы узнать последний вариант параметра, оставьте крутилку или слайдер на вашем передатчике в выбранной позиции, подключения к МП затем нажмите кнопку «Refresh Params», значение должно отобразиться в в соответствующем окне на вкладке «Parameter List» (под значениями TUNE_HIGH & TUNE_LOW). В качестве альтернативы выберите вкладку «Terminal» снова, тип «test», а затем «tune» и выбранное значение будет видно при прокрутке окне вниз. Введите это значение в правильном месте во вкладке «Configuration».
Теперь можно настроить еще один параметр, или, если вы закончили настройку, установите параметр в CH6_NONE (это важно!)
Главным параметром для настройки имеет значение вашего параметра Rate_KP. Это значение отвечает за поведение Вашего коптера:
- отсутствие ответа на управляющие входы (слишком низкий)
- вялым (слишком низкий)
- стабильным (в самый раз)
- более активным (немного слишком выше чем надо)
- или колеблющимся (слишком высокий)
Вот все параметры которые можно настроить таким способом:
CH6_NONE 0
--- высота(Attitude)
CH6_STABILIZE_KP 1
CH6_STABILIZE_KI 2
CH6_STABILIZE_KD 29 / / дублировать с CH6_DAMP
CH6_YAW_KP 3
CH6_YAW_KI 24
--- оценка(сота()способомаязкая те параметр по новой и етра может быть выставлено в Rate)
CH6_ACRO_KP 25
CH6_RATE_KP 4
CH6_RATE_KI 5
CH6_RATE_KD 21
CH6_YAW_RATE_KP 6
CH6_YAW_RATE_KD 26
--- контроль скорости удержания высоты (Altitude rate controller )
CH6_THROTTLE_KP 7
--- Дополнительно (Extras)
CH6_TOP_BOTTOM_RATIO 8
CH6_RELAY 9
--- Навигация (Navigation )
CH6_TRAVERSE_SPEED 10 / / Максимальная скорость полета к следующей точке маршрута
CH6_NAV_KP 11
CH6_LOITER_KP 12
CH6_LOITER_KI 27
--- Специфичный для традиционного вертолета (Trad Heli specific )
CH6_HELI_EXTERNAL_GYRO 13
--- контроль высоты (altitude controller)
CH6_THR_HOLD_KP 14
CH6_Z_GAIN 15
CH6_DAMP 16 / / дублировано с CH6_YAW_RATE_KD
--- Контроллер оптического удержания позиции (optical flow controller )
CH6_OPTFLOW_KP 17
CH6_OPTFLOW_KI 18
CH6_OPTFLOW_KD 19
CH6_NAV_I 20
CH6_LOITER_RATE_KP 22
CH6_LOITER_RATE_KI 28
CH6_LOITER_RATE_KD 23
CH6_AHRS_YAW_KP 30
Способ 2: Летающий Attitude Tuning с CH6:
В этом случае вы будете настраивать свой коптер во время полета.
Это предполагает, что коптер уже довольно хорошо летает и хорошо управляется и, что пилот имеет достаточно опыта, чтобы легко сохранить коптер на уровне глаз и в том же месте в течение по крайней мере 60 секунд. Также для этот способа предпочтительно иметь открытое пространство, возможно 10mx10m (30ftx30ft).
Следуйте установкам в способе 1 описанном выше.
Первым делом для Rate_P выберите значение + и - около 30% -40% от значения по умолчанию (так для Rate_P установить "нижнее" в 0,100 и "верхнее" в 0,180 от дефолта 0,140) Будьте осторожны, чтобы не установить эти значения неправильно. - не установите 0,100 как 1,000 или 0,010!
Зависните на высоте около 1,5 м (5 футов) и погоняйте коптер немного влево и вправо, затем приземлитесь и вращайте крутилку или слайдер, который управляет каналом, или если вы можете летать и поворачивать крутилку или слайдер делайте настройку прямо в полете, обращая внимание на разницу и выберите тот стиль полета в, котором Вы "чувствуете себя" наилучшим образом. Более высокие значения могут привести к колебаниям, так что следует немного снизить, пока коптер не будет летать без колебаний, но не слишком вяло.
Узнать полученное значение параметра можно способом описанным для варианта 1.
Примечание: (Задайте значения I в целом маленьким, например, 0.000-0.100.)
Как работают P и I:
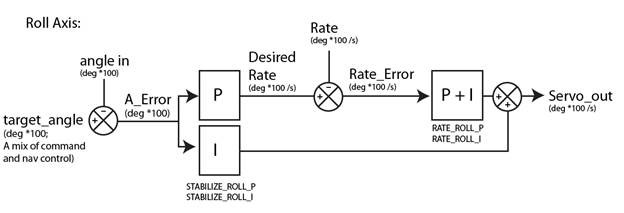
Новый контроллер для AC2 является вариацией вокруг следующей идеи. Возьмем ошибку угла и сгенерируем желаемую скорости вращения. Эта скорость вращения (в градусах) сравнивается с текущей скоростью и умноженной на Rate_P. Значение преобразуется в ШИМ и посылается к двигателям. Это дает нам множество преимуществ, таких как возможность указать желаемую скорость перемещения, вращения или изменения высоты. Она также дает нам второй параметр - I, позволяющий контролировать то, как мы должны компенсировать параметры для достижения желаемой скорости.