По завершении обгона он сможет, не создавая помех обгоняемому транспортному средству, вернуться на ранее занимаемую полосу»
Скорость движения ТС при обгоне достаточно высока, поэтому ошибка водителя в оценке времени и пути обгона может привести к ДТП с тяжелыми последствиями.
Обгон, связанный с выездом на встречную полосу движения, является наиболее опасным, поскольку по этой полосе могут следовать встречные ТС и обгоняющему необходимо возвратиться на ранее занимаемую полосу так, чтобы не создать им помеху.
При малой интенсивности движения (до 100 автомобилей в час), как правило, выполняется обгон с ходу. При большой интенсивности движения в прямом и попутном направлениях водитель выбирает благоприятный момент, следуя некоторое время со скоростью впереди идущего ТС, а затем производит обгон при интенсивном разгоне. В некоторых случаях, когда водитель обгоняющего автомобиля неверно оценивает обстановку перед обгоном или когда появляется дополнительная помеха обгону, водителю обгоняющего автомобиля приходится притормаживать, прерывая обгон, и снова занимать свою полосу движения до следующего благоприятного момента, такой маневр называют незавершенным обгоном.
До начала обгона обгоняющий автомобиль А (рис.1) движется на безопасном расстоянии DAB от обгоняемого автомобиля В, называемом дистанцией безопасности. Эта дистанция должна быть таковой, чтобы при внезапной остановке ТС - лидера, следующего впереди, ТС движущееся сзади могло остановиться на этой же полосе путем торможения.
В процессе обгона обгоняющий автомобиль А отклоняется влево и выезжает на встречную полосу движения, при этом расстояние между ТС становится меньше дистанции безопасности и при внезапном экстренном торможении следующего впереди ТС, обгоняющий должен оставаться на соседней полосе, поскольку он при таком же экстренном торможении не сможет остановиться на расстоянии меньшем, чем дистанция безопасности.
Движение по полосе встречного движения может происходить как при постоянной, так и при переменной скорости. Во втором случае обгоняющий автомобиль А в зависимости от ситуации может весь участок обгона пройти с ускорением или сначала с ускорением, а затем с постоянной скоростью, не превышающей допустимую в данных условиях, или сначала с ускорением, а затем с некоторым замедлением при перестроении в свой ряд в стесненных условиях (например, при последовательном обгоне движущихся на небольшом расстоянии друг за другом ТС В и Е).
В заключительной стадии обгона обгоняющее ТС должно занимать свой ряд после того, когда оно «уйдет» от
обгоняемого на безопасное расстояние Dва, чтобы не создавать ему помехи и «не подрезать его», при этом обгоняющий должен полностью освободить полосу встречного движения на расстоянии Dас до встречного автомобиля С не менее чем за 40м в населенных пунктах и более 60м вне населенных пунктов [12].
Маневр обгона может быть начат после того, как встречное ТС D освободит полосу движения для обгоняющего ТС А. Перед выполнением обгона водителю обгоняющего ТС А необходимо убедиться, что на расстоянии видимости Sвид не будет помехи для обгона.
Sвид = SA+SC+DAC, (1)
где SА и SС -пути, проходимые транспортными средствами А и С за время совершения маневра;
DAC- запас расстояния между обгоняющим ТС А и встречным С.
Кроме этого следует убедиться, что расстояние между идущими друг за другом автомобилями B и E позволит автомобилю А занять между ними свою полосу движения, не создавая им помех.
В соответствии с П. 9.11 ПДД:
Вне населенных пунктов на дорогах с двусторонним движением, имеющих две полосы, водитель транспортного средства, для которого установлено ограничение скорости, а также водитель транспортного средства (состава транспортных средств) длиной более 7м должен поддерживать между своим и движущимся впереди транспортным средством такую дистанцию, чтобы обгоняющие его транспортные средства могли без помех перестроиться на ранее занимаемую ими полосу».
Если же расстояние между автомобилями В и Е мало, выбирают момент для обгона сразу двух автомобилей. На практике бывают случаи ,когда водитель обгоняющего автомобиля «втискивается» между ТС идущими в попутном направлении, создавая помехи обгоняемому автомобилю В, вынуждая его водителя снижать скорость
Исследования при дипломном проектировании по оценке влияния различных факторов на время выполнения маневра обгона, расстояние, проходимое автомобилем при обгоне и расстояние видимости помогут правильно оценить дорожно-транспортную ситуацию с позиции предотвраще-ния ДТП и решения вопросов экспертизы, связанных с обгоном.
РАСЧЕТ ПАРАМЕТРОВ ОБГОНА
Дистанция безопасности
Достоверность расчетов по определению параметров обгона зависит от правильного принятия основных допущений, связанных с назначением дистанции безопасности между ТС до и после обгона. Эта дистанция зависит от многих факторов: типа ТС, дорожных условий, мастерства водителя, скорости TС, интенсивности движения и т.д.; величина дистанции не подлежит точному расчету. Поэтому в экспертных исследованиях следует подчёркивать, что найденное значение является расчётным.
В литературе имеется много предложений для ориентировочного определения дистанции безопасности. Некоторые авторы предлагают выбирать дистанцию безопасности, исходя из времени, необходимого для оценки дорожно-транспортной ситуации, считая, что для этого потребуется 2...5 с. В этом случае D=(2…5)*V. По данным работы [1], дистанцию можно определять из графика, представленного на рис.3 в зависимости от типов АТС, движущихся друг за другом.
В работе [8] приведена эмпирическая зависимость, по которой предлагается определять расстояние между автомобилями в момент начала выравнивания скоростей перед обгоном:
D = 6.5*e0,09*Vсв (2)
где D – расстояние между автомобилями, м;
е = 2.718 – основание натуральных логарифмов;
VСВ – скорость свободного движения, м/с.
В работе [25] дистанцию безопасности предлагается определять в зависимости от типа обгоняемого автомобиля по формулам:
для легковых автомобилей
DAB = 0.0256* VА2 + 4;
DBA = 0.0201* VА2 + 4; (31)
для средних грузовых
DAB = 0.0407* VА2 + 4;
DBA = 0.0372* VА2 + 4; (311) для тяжелых грузовых автомобилей и автопоездов
DAB = 0.0587* VА2 + 4;
DBA = 0.0515* VА2 + 4; (3111)
где DAВ и DBA – расстояния между автомобилями, соответственно, до и после обгона, м;
VA - скорость обгоняющего автомобиля, м/с.
Рассмотрим, что происходит при движении ТС в потоке и найдём наименьшее расстояние на котором должны следовать ТС друг за другом, чтобы в случае экстренного торможения лидера, следующее за ним ТС могло остановиться.
Водитель ТС, следующего сзади, может заметить начало торможения переднего ТС, по изменению его скорости (при торможении двигателем, стояночной или вспомогательной тормозными системами) или по включенному стоп-сигналу.
Момент загорания стоп-сигнала зависит от места установки его включателя. Желательно, чтобы сигнал включился как можно раньше и предупредил водителя ТС, следующего сзади о торможении ТС-лидера. Этому способствует связь включателя с педалью тормоза; при малейшем нажатии на педаль тормоза стоп-сигнал загорается. Такие включатели получили наибольшее распространение на современных легковых автомобилях.
Другой тип включателей стоп-сигнала устроен так, что его контакты замыкаются под действием диафрагмы, которая прогибается от давления жидкости или воздуха, поступающего в тормозную магистраль. Включение стоп-сигнала происходит при нарастании давления в магистрали, при этом стоп-сигнал включается позже, чем в первом случае. С достаточной точностью можно считать, что время запаздывания включения стоп-сигнала после нажатия на педаль тормоза в этом случае равно времени Т2 запаздывания срабатывания тормозного привода.
Большинство авторов предлагает определять дистанцию безопасности между автомобилями, движущимися в потоке, по формуле, учитывающей время, необходимое для обнаружения сигнала торможения впереди идущего ТС, т.е. время реакции водителя обгоняющего ТС и разность тормозных путей ТС. В работе [5], например, предлагается считать
DAB = SAО – SBТП + S3, (4)
где DAB – дистанция между ТС А и В;
SAО – остановочный путь ТС А; это расстояние, которое проходит ТС А с момента обнаружения опасности до остановки ( в нашем случае это расстояние, пройденное с момента загорания стоп-сигнала);
SВТП – путь, который проходит ТС В с момента загорания стоп-сигнала до остановки;
S3 – запас расстояния, в проекте его рекомендуется принять S3 = 3м (в экспертных исследованиях запас расстояния принимают SЗ = 0). В реальных условиях движения запас расстояния позволяет избежать столкновения в случае ошибочного прогнозирования ситуации.
Остановочный путь SAО ТС А (индекс «А» показывает, что величина относится к ТС А) можно определить по формуле:
SAО = S1А + S2А + S3А + SТA; (5)
где S1А – путь, проходимый ТС А за время Т1А реакции водителя:
S1А= Т1А*VА; (6)
VA – скорость движения ТС А, м/с;
S2А –путь, проходимый за время Т2А запаздывания срабатывания тормозного привода:
S2А = Т2А*VА; (7)
S3А – путь, проходимый за время Т3А нарастания замедления:
S3А = 0,5*Т3А*VА; (8)
SТA – путь, проходимый при установившемся замед-лении jУСТ.
SТА = VЮА2/(2* jУСТА); (9)
здесь VЮА – скорость ТС А в начале торможения с установившимся замедлением (при блокировании колёс её называют юзовой), м/с:
VЮА=VА– 0,5*jУСТА*T3А. (10)
iУСТА- установившееся замедление ТС А в рассматриваемых условиях. Оно зависит от величины замедления jУСТ, которое может быть получено на горизонтальной дороге и величины уклона i:
jУСТА = jУСТ ± i*g;
здесь g=9/81м/с2 – ускорение свободного падения;
Остановочный путь можно определить и по такой формуле:
SAО = (Т1А + Т2А + 0,5*Т3А)*VA +VЮA2/(2*jУСТА). (11)
Время реакции водителя Т1А выбирается в пределах от 0.3 до 1.8с по нормативным документам в зависимости от дорожно-транспортной ситуации [13]. Поскольку в курсовой работе не рассматривается конкретная ситуация, условно примем, что Т1А=0,8 с.
Время Т2А запаздывания тормозной системы, время Т3А нарастания замедления и установившееся замедление jУСТА (м/с2) зависят от категории ТС, степени его загрузки и условий сцепления (см. приложение 1);
Путь, который проходит ТС В с момента загорания стоп-сигнала определяется по формулам (12 и 13):
при загорании стоп-сигнала в момент нажатия на педаль (для гидравлического тормозного привода):
SВТП=S2В+S3B+STB=(Т2В+0,5*Т3B)*VB+VЮВ2/(2*jУСТВ); (12)
при загорании стоп-сигнала от нарастания давления в тормозной магистрали (для пневматического привода):
SВТП = S3B + STB = 0,5*Т3B*VB + VЮВ2/(2* jУСТВ); (13)
здесь индексом «B» отмечены величины, относящиеся к ТС В.
При совмещении тормозных диаграмм на одном графике в едином масштабе времени, следует учесть способ включения стоп-сигнала.
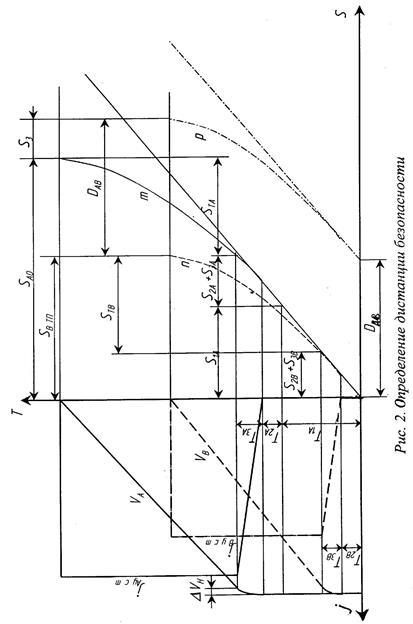
На рис.2 показаны зависимости изменения замедления, скорости и пути проходимого автомобилями А и В, в функции времени. При построении графика принято, что VА = VB , включатель стоп-сигнала у ТС-лидера связан с педалью тормоза, а jАуст > jВуст. Кривые n и m показывают сравнительные зависимости изменения пути, проходимого автомобилями А и В при торможении, а штрихпунктирная кривая р - перемещение автомобиля В для случая, если в начальный момент торможения, он будет находиться на безопасном расстоянии DAB от автомобиля А.
Подобный график, рассчитанный для заданных ТС, следует привести в пояснительной записке на отдельной форматке или на одном листе вместе с другими графиками.
При построении кривых сначала наносят тормозные диаграммы jА,В = f (Т), отмечая на них слагаемые Т1 , Т2, Т3, Тт (Тт = VЮ/jУСТ), затем определяют падение скорости DVн за время нарастания замедления
DVн = 0,5*jуст*Т3 (14)
и наносят на график кривые изменения скорости VA и VB в функции времени. Далее кривую изменения скорости разбивают на ряд интервалов и в каждом из них
| |||
Рис. 3. Дистанция безопасности при движении ТС в потоке:
1-грузовой автомобиль следует за легковым;



| |





 2-грузовой движется за грузовым;
2-грузовой движется за грузовым;
3-легковой следует за легковым;
 4-легковой следует за грузовым.
4-легковой следует за грузовым.
Рис. 4. Экспериментальные зависимости динамических габаритов
определяют тормозной путь по формуле
DSi = (Vi2 – Vi+12)/ (2*jiср), (15)
где DSi - тормозной путь в интервале, м;
Vi , Vi+1 – соответственно, начальная и конечная
скорости в интервале, м/с;
jiср - среднее замедление в интервале, м/с2;
далее откладывают эти значения в правой части графика в конце каждого интервала нарастающим итогом. Изменение времени в каждом интервале будет равно:
Dti = DVi / jiср. (16)
На этом же графике следует построить необходимые кривые для определения дистанции между ТС в момент начала обгона с ходу, когда скорость VA выше скорости VB.
При выполнении задания следует сопоставить результаты определения дистанций, найденных всеми предлагаемыми способами и обосновать значения дистанций, принятых для дальнейших расчетов.
Зависимости дистанций безопасности от скорости необходимо представить в виде двух отдельных графиков DAB=f(V) и DBA=f(V), которые следует изобразить на миллиметровой бумаге.
Результаты определения дистанций DAВ и DBA необходимо сравнить с экспериментальными характеристиками, полученным на дорогах СССР и США [2], которые приведены на рис. 4. Следует обратить внимание, что на этом рисунке по оси ординат отложена сумма длины автомобиля и дистанции безопасности перед ним, т.е. LB +DAB и LB+DBA .
При дипломном проектировании требуется более детально рассмотреть правомерность принятых допущений о назначении дистанции безопасности с учетом фаз перестроения ТС до и после выполнения обгона.
Обгон с ходу
Рассмотрим схему обгона с ходу автопоезда В одиночным автомобилем А (рис.5). В нижней части рисунка цифрой I обозначен участок дороги, где сплошными линиями показано начальное положение ТС перед обгоном, а штриховыми - положение, когда обгоняющий автомобиль А может начинать перестроение в свой ряд. Цифрой II показано положение ТС после завершения обгона. На графике рис.5 в координатах Т и S показано перемещение участников движения и характерные точки. Наклон линий будет тем больше, чем больше скорость ТС.
Положение ТС в различные моменты времени обозначено соответствующими точками: в точке 1, например, передняя часть обгоняющего автомобиля А поравнялась с задней частью обгоняемого автопоезда В; в точке 2 задняя часть автомобиля А поравнялась с передней частью автопоезда В, однако перестроение автомобиля А может начинаться лишь в точке 3, когда обгоняющий автомобиль А уйдет на безопасное расстояние DBA от обгоняемого автопоезда.
До начала выполнения обгона водитель обгоняющего автомобиля А стремится оценить дорожно-транспортную ситуацию перед обгоняемым ТС и, как правило, смещает свой автомобиль влево, на рисунке этот этап перестроения не отображён.
За начало обгона принимается положение, когда обгоняющий автомобиль А, следующий со скоростью VA>VB, приблизится к обгоняемому автопоезду В на безопасное расстояние DАB, после чего обгоняющий автомобиль А должен перестроиться в левый рад для обгона. При расстоянии меньше, чем DАВ, в случае экстренного торможения ТС-лидера В, обгоняющий автомобиль А, также применив экстренное торможение, уже не сможет остановиться до линии движения задней части ТС-лидера, поэтому он не должен возвращаться на свою полосу движения, чтобы не допустить попутного столкновения.
Задача определения пути обгона и расстояния видимости может быть решена графически. Для этого задают какое-либо время ТМ (например равное 5 или 10 с), по известной скорости VA определяют путь (S=V*T), который проходит автомобиль А за это время и отмечают это расстояние на оси абсцисс (точка F). Через точку F1 пересечения горизонтали и вертикали, поведенных через эти точки и начало координат проводят линию ОF', соответствующую перемещению задней части обгоняющего автомобиля А по времени. На расстоянии LА от неё проводят параллельную ей линию перемещения передней части автомобиля А.
По оси абсцисс от начала координат откладывают сумму расстояний LA+DBA+LB+DBA, и отмечают точку К. Затем, как и в первом случае, находят путь КМ, проходимый автомобилем В за время ТМ, и проводят наклонную линию КМ1. Пересечение её с линий ОF в точке 3 определяет момент времени Т1, когда задняя часть автомобиля А окажется на дистанции безопасности DBA от передней части автомобиля В и обгоняющий автомобиль А сможет перестраиваться в свой ряд. Слева от линии КМ1 проводят параллельные ей линии, соответствующие перемещению габаритных точек тягача и прицепа.
Если при завершении обгона скорость обгоняющего автомобиля А значительно превышает скорость обгоняемого ТС, то дистанция безопасности DВА, вычисленная по формуле (4), будет отрицательной и её следует откладывать от передней части ТС В против хода движения. В этом случае обгоняющий автомобиль А может оказаться рядом с обгоняемым В или даже сзади него и, естественно, с этого момента он не может перестраиваться в свой ряд, поэтому момент перестроения в таких случаях должен выбираться из других соображений. Из формулы (4) следует, что отрицательной дистанция становится потому, что тормозной путь обогнавшего автомобиля А, движущегося с большей скоростью, превышает тормозной путь обгоняемого ТС В.
Обогнавшее ТС может начинать обратное перестроение в свой ряд лишь после того, как оно опередит обгоняемое ТС не менее, чем на 3-5 метров, чтобы не создать ему помеху. Некоторые авторы считают, что после обгона перестраиваться в свой ряд можно тогда, когда обгоняемое ТС покажется в зеркале заднего вида.
На перестроение затрачивается время ТП, которое можно определить, используя формулы для манёвра «смена полосы движения» – манёвр «переставка» [13]:
_________
ТП = 4*Ö Y/(2*g*φY), (17)
где Y – боковое смещение автомобиля при выполнении манёвра «смена полосы движения», в м;
g – ускорение свободного падения, g = 9.81 м/с2;
φY – коэффициент сцепления, реализуемый в боковом направлении.
Принимая во внимание, что при перестроении автомобиль движется за счёт окружной силы на ведущих колёсах, для чего в продольном направлении уже реализуется часть коэффициента сцепления, равная φХ, в боковом направлении может быть реализована другая его часть - φY, равная:
_______
φY = Ö φ2 – φX2, (18)
где φ – заданный коэффициент сцепления, который может быть реализован в любом направлении;
φХ – коэффициент сцепления, который реализуется в рассматриваемый момент в продольном направлении. При перестроении могут быть различные режимы движения ТС: накат, установившееся движение, разгон или торможение. Поскольку при проектировании не рассматривается конкретная дорожно-транспортная ситуация, установить степень реализации продольного коэффициента сцепления не представляется возможным. В таких случаях рекомендуется принять [13]:
φY = 0,8* φ
Отложив от точки Т1 по оси ординат время перестроения ТП, проводят горизонтальную линию, которая пересекает линию ОF1 в точке 4, соответствующей моменту завершения обгона (в этот момент задняя часть автомобиля А, и следовательно всё ТС снова займёт правую полосу движения); в этой точке обгон считается завершенным.
От точки 4 вправо откладывают длину автомобиля LА, дистанцию DAC и получают точку 6, которая определяет собой крайнее возможное положение передней части встречного автомобиля С. При известных времени ТO (ТО=Т1+ТП) полного выполнения обгона и скорости VC встречного автомобиля находят путь SОС,
SОС = ТО*VС , (19)
который проходит встречный автомобиль С с начала обгона и расстояние видимости SВИД от водителя автомобиля А до передней части автомобиля С в момент начала обгона:
SВИД = DAB + LB + DBA + SB + SAП + LA + DAC + SOC (20)
Найденное графическим путём расстояние види-мости следует проверить аналитическим расчётом, подставляя в формулу (20) все принятые и вычисленные значения.
За время обгона Т1 автопоезд В проходит путь:
SВ = КР = VB * T1 (21)
(рис.5), а автомобиль А проходит расстояние:
SA=LA+DAВ+LB+DBA+SB (22)

Выражая время движения Т1 через пути SА, SВ и скорости VA, VB обгоняющего и обгоняемого ТС, получим:
SA/VA=SB/VB (23)
или (LA+DAВ+LB+DBA+SB)/VA= SB/VB,
откуда SB=(LA+DAВ+LB+DBA)*VB/(VA-VB), (24)
тогда ТВ = SB/VB, (25)
и SA=SB*VA/VB. (26)
Путь обгона автомобиля А S0А (рис.5) - расстояние, которое проходит обгоняющий автомобиль с момента выхода на полосу встречного движения до момента возвращения в свой ряд - составит:
S0А = ON = SА+SАП = SA+VA*ТП, (27)
здесь SАП – путь, который проходит обгоняющий автомобиль за время перестроения.
Обгон необходимо завершить на безопасном расстоянии DAC от встречного автомобиля С. Как указывалось ранее, это расстояние должно быть не меньше 40 и 60 м, соответственно, в населённых пунктах и вне них.
Расстояние видимости SВИД можно определить как сумму:
SВИД = SOA+LA+DAC+SОС. (28)
Обгон после выжидания
При большой плотности транспортного потока водителю обгоняющего автомобиля приходится выбирать момент для того, чтобы совершить обгон, не создавая помехи встречному транспорту. В таких случаях обгоняющий автомобиль некоторое время движется за обгоняемым ТС с одинаковой с ним скоростью, а когда встречная полоса освобождается на достаточно большом расстоянии, его водитель выполняет обгон с ускорением.
Разгон с максимальной интенсивностью совершается, за наиболее короткое время при наименьшем пути обгона; в этом случае определяют минимальное расстояние видимости. Расчет времени и пути при разгоне с максимальной интенсивностью производится по обычной методике, описанной в методических указаниях по тяговому расчету автомобилей. В этом случае предполагается, что водитель использует все возможности двигателя: полностью нажимает на педаль подачи топлива и переключает передачи при максимальных оборотах.
В реальных условиях обгона после выжидания водитель, как правило, не стремится разгоняться с максимальной интенсивностью, это способствует снижению расхода топлива и уменьшению нагрузок на двигатель и трансмиссию.
В наших расчетах для упрощения примем, что ускорение при разгоне на каждой передаче имеет постоянное значение и составляет 60-80% от максимального на передаче, а угловая скорость не превышает 60-80% от угловой скорости ωN при максимальной мощности двигателя. Такое допущение оправдано тем, что, во-первых, оно позволяет значительно упростить расчеты, а во-вторых, на наш взгляд, соответствует большинству обгонов, при которых водитель бережно относится к автомобилю.
Степень использования мощности двигателя – Кр и его оборотов - Кω можно принять самостоятельно: в пределах Кр=Кω=0.6…0.8; в этом случае максимальная мощность двигателя не будет превышать N1макс=(0.6-0.8)*NEMAКС; а угловая скорость будет ограничена- ωемакс=(0.6-0.8)* ωN).
Расчет времени и пути разгона при указанных выше допущениях проводят в следующей последовательности.
1. Из справочной литературы [15] выписывают следующие исходные данные:
GА – сила тяжести ТС с полной нагрузкой, Н; (GА = МА*g – где МА – масса ТС с полной нагрузкой, кг; g – ускорение свободного падения – g = 9.81м/с2);
МС – собственная масса ТС ,кг (состоит из массы незаправленного и неснаряженного ТС, масс топлива, охлаждающей жидкости, запасных колёс, инструмента и обязательного оборудования);
Мг – масса груза, кг; для легковых ТС и автобусов Мг следует определить как разность масс МА ТС с полной нагрузкой без собственной массы ТС и массы водителя МВ=80кг: ( МГ=МА-МС-МВ);
МАМАКС – максимальный момент двигателя, Н*м;
wN - угловая скорость вала двигателя при максимальной мощности, рад/с;
iКi – передаточные числа на каждой передаче КП;
iО - передаточное число главной передачи;
iРК - передаточное число раздаточной коробки (на высшей передаче);
hm - коэффициент полезного действия трансмиссии; можно принять: для легковых АТС, грузовых на их базе и микроавтобусов - 0.9…0.92; для грузовых АТС и автобусов с одинарной главной передачей - 0.88…0.9; с двойной – 0.85…0.88; для автомобилей повышенной проходимости – 0.8…0.88.
rК – радиус качения колеса, м; его можно определить по приближенной формуле:
rК = 0.0005*(d+1.8*H), (29)
где d – диаметр обода, мм; Н – ширина профиля шины, мм;

s1 и s2 - постоянные, входящие в формулу для определения коэффициента учета вращающихся масс.
Для одиночных ТС: s1=1.03...1.05; s2 = 0.01...0.06;
для автопоездов: s1 = 1.008...1.013; s2 = 0.01...0.06; (меньшие значения относятся к более тяжелым АТС);
y - коэффициент суммарного дорожного сопротивления;
y = f ± i; где: f – коэффициент сопротивлении качению; для наших расчетов можно принять f = 0.01…0.015, что соответствует ровной асфальтобетонной дороге;; i – коэффициент сопротивления подъему (см. задание).
2.Находят максимальное значение окружной силы, на каждой передаче:
РКМАКС = (МКМАКС*iК*iО*iРК*hm)/rК; (30)
где РКМАКС - максимальная окружная сила на ведущих колесах, Н;
3. Определяют расчетное значение ускорения на всех передачах;
jРi= (Кр*РКМАКС - РY - РW)*g /(GА* d КI), (31)
где РY - сила суммарного дорожного сопротивления:
РY = GА*y, (32)
РW - сила сопротивления воздуха, в Н; для упрощения расчетов примем, что РW = 0;
dКi– коэффициент учета вращающихся масс на соответствующих передачах:
dКi= s1+ s2*iКi. (33)
4. Находят расчетные значения максимальных скоростей движения на каждой передаче, км/ч:
VРМ = 3.6*Кω*ωN *rК / iК*i0*iРК. (34)
5. Определяют время и путь разгона на каждой передаче в интервалах изменения скорости DV по формулам:
Dt = DV / jРi ; DS =VCР* Dt / 3.6, (35)
где VCР– средняя скорость в интервале, км/ч.
VСР=(VНАЧ + VРМ)/2; (36)
здесь VНАЧ- начальная скорость в интервале; для первой передачи VНАЧ=0
Для упрощения расчетов можно пренебречь временем, затрачиваемым на переключение передач, тогда начальная скорость разгона на последующей передаче будет равна конечной скорости разгона на предшествующей передаче (VНАЧ2 = VРМ1; VНАЧ3 = VРМ2 и т.д.).
7. Далее находят суммарные время Т=åDТ и путь S=ΣDS движения к концу разгона в каждом интервале и на миллиметровой бумаге вычерчивают два графика V=f(Т) и S=f(Т) изменения скорости и пути разгона от времени с началом координат в точке О (рис. 6).
Поскольку принято, что ТС А разгоняется при постоянных значениях ускорения, график изменения скорости по времени будет выглядеть в виде ломаной линии, угол наклона отдельных отрезков которой к оси ординат будет тем больше, чем больше ускорение. График изменения пути разгона от времени при постоянных значениях ускорения представляет собой последовательно соединённые между собой квадратные параболы.
Чтобы точнее изобразить параболы изменения пути разгона по времени, целесообразно рассчитать хотя бы по два интервала на каждой передаче, задав промежуточное значение скорости в интервале, равное примерно среднему значению между начальной и максимальной скоростью:
VПРОМ » (VНАЧ + VРМ)/2, (37)
разбив время и путь от VНАЧ до VПРОМ и от VПРОМ до VРМ.
8. Используя полученные зависимости, определяют время и путь обгона и находят необходимое расстояние видимости встречного ТС.
Для решения поставленной задачи рассмотрим процесс обгона после выжидания более подробно.
Выжидая удобный момент для обгона, водитель автомобиля А движется со скоростью автомобиля В, поэтому интенсивность разгона его автомобиля в начале обгона будет соответствовать скорости VА=VВ и включённой в этот момент передаче.
Эту скорость отмечают на оси абсцисс левого графика (рис.6), проводят вертикаль до пересечения с линией V=f(Т) и на оси ординат отмечают момент времени ТНАЧ, после которого автомобиль А начинает разгон для обгона.
В правой части графика на кривой S=f(Т) отмечают точку О1, куда переносят новое начало координат, поскольку обгон после выжидания начинается с изменения скорости и пути именно с этого момента.
Вправо от точки О1 откладывают сумму расстояний LА+ DАВ + LВ и отмечают точку К, показывающую расположение передней части обгоняемого автомобиля В, которое должно быть к моменту времени ТНАЧ начала обгона. Далее через точку К проводят наклонную линию К1К, соответствующую перемещению передней части автомобиля по времени; наклон этой линии определяется также, как при построении линий обгона с ходу (рис. 5).
В точке 1 пересечения линии К1К и кривой S=f(Т), характеризующей перемещение по времени обгоняющего автомобиля А поравняются задняя часть автомобиля А и передняя часть обгоняемого автомобиля В. Теперь обгоняющий автомобиль должен уйти от обгоняемого на безопасное расстояние DВА и только тогда перестраиваться в правый ряд. Дистанция безопасности DВА будет тем меньше, чем больше разность скоростей обгоняющего и обгоняемого ТС; она может оказаться и отрицательной..
Для определения момента, когда можно начинать перестроение в правый ряд, от точки 1 вправо откладывают дистанцию безопасности DВА, соответствующую скоростям VA и VВ обгоняющего и обгоняемого ТС в рассматриваемый момент времени (точка 2), и строят линию 2-21, учитывая уменьшение дистанции безопасности при увеличении скорости обгоняющего автомобиля (отрицательные значения DВА откладывают влево от линии К1К).
Если скорость обгоняющего автомобиля ограничена (VАМАКС = VОГР, точка 4), то с этого момента дистанция безопасности будет оставаться неизменной (линия 3-211).
В точке F задняя часть обгоняющего ТС будет находиться на расстоянии дистанции безопасности DВА от передней части ТС В и обгоняющий автомобиль А сможет начинать перестроение в правый ряд.
Естественно, что при отрицательном значении дистанции DВА обгоняющее ТС не может начинать перестроение в свой ряд, поскольку справа от него будет следовать ТС В. Чтобы не создать ему помеху, обгоняющий автомобиль должен опередить ТС В хотя бы на DВА=3-5 метров и только тогда начинать перестроение. Для нахождения этого момента следует от точки К вправо отложить дистанцию DВА=3-5 метров (точка R) и провести через неё линию RF1, параллельно линии КК1 движения передней части ТС В. Точка F1 в этом случае и будет тем моментом, когда обгоняющий автомобиль А сможет начинать перестроение в правый ряд.
Время ТП перестроения следует определить по формуле (17) в зависимости от бокового смещения и условий сцепления. За это время автомобиль А пройдет путь SАП, его определяют графически, откладывая от точки F вверх время перестроения ТП. Конец обгона характеризуется точкой 5 (рис.6), когда автомобиль А снова займёт свою полосу движения. На графике показано, что в рассматриваемом случае точка 5 принадлежит штриховой линии, соответствующей движению автомобиля А при ограничении скорости. От точки О1 до точки 5 автомобиль А проходит путь SОА, равный пути обгона за время обгона ТО (ордината О1ТО).
Необходимое расстояние видимости встречного ТС SВИД определяется так же как при обгоне с ходу; для этого рис.6 следует дополнить линиями, отражающими движение встречного ТС (на рис.6 методических указаний эти линии не показаны).
Незавершенный обгон
При обгоне водитель обгоняющего автомобиля А постоянно анализирует изменение дорожно-транспортной ситуации и при необходимости принимает меры к скорейшему завершению обгона (за счет увеличения скорости или сокращения дистанции безопасности DВА после обгона) или прерывает обгон. Такая ситуация может возникнуть при неправильной оценке расстояния видимости встречного ТС, его скорости и скоростных возможностей своего ТС, при увеличении скорости обгоняемого ТС; при внезапном появлении на полосе встречного движения транспорта, начавшего выполнять обгон во встречном направлении или выехавшего из бокового проезда и др.
Если водитель обгоняющего ТС решает, что при обгоне он не сможет вернуться на свою полосу движения так, чтобы не создать опасную ситуацию, он прерывает обгон; такой обгон называют незавершённым.
В последнем случае, при своевременном правильном осознании ситуации, обычно применяют служебное торможение с замедлением jСЛ не превышающем половины от jУСT – максимально возможного в данных условиях.
Решив отказаться от обгона, водитель снижает скорость автомобиля до тех пор, пока она не будет равна или станет меньше скорости VB следующего впереди автомобиля, а затем перестраивается на свою полосу движения.
Очевидно, что если в момент осознания опасности расстояние между ТС А и В будет слишком мало, а разность скоростей достаточно большой, то обгоняющий автомобиль может не успеть выполнить обгон и перестроиться на свою полосу движения. Ему придется снизить скорость (может даже экстренным торможением) до минимально устойчивой, пропустить вперед обгоняемый автомобиль и с малой скоростью возвратиться на прежнюю полосу.
В конце незавершенного обгона обгоняющий автомобиль А должен освободить полосу встречного движения и пристроиться за обгоняемым автомобилем В на безопасном расстоянии, не создавая помехи встречному ТС. При завершении перестроения расстояние до встречного ТС должно быть таким же, как и при обгоне с ходу (40…60м), а до обгоняемого таким, чтобы в случае его внезапного торможения обгоняющий автомобиль А мог остановиться и не допустить наезда.
Поскольку перед перестроением в свой ряд обгоняющий автомобиль А движется с замедлением и его скорость становится меньше скорости VВ обгоняемого автомобиля, дистанция безопасности DАВ в этом случае может быть меньше, чем при свободном движении в потоке.
Это может быть из-за, того, что, во-первых, VА < VВ; во-вторых, сокращается время реакции водителя, поскольку он более внимательно следит за развитием дорожно-транспортной ситуации; в третьих, если перестроение осуществляется совместно с торможением, сокращается время срабатывания тормозного привода, поскольку педаль тормоза уже нажата.
Если определение дистанции безопасности соответствует периоду, когда водитель осуществляет служебное торможение, то время реакции можно принять Т1A1 = 0.3…0,5с, так как водитель уже подготовлен к нажатию на педаль тормоза и ему остаётся только изменить усилие нажатия.
Величину jСЛА при выполнении расчётов можно принять jСЛА = 0.5*jУСТА.
Если торможение при незавершенном обгоне производится с замедлением jСЛА меньшим, чем максимальное установившееся замедление jУСТ, то и время Т3А1 нарастания замедления до этого значения ускорения также будет меньше нормативного Т3; его следует пропорционально уменьшить, определив по формуле:
Т3А1 = Т3А *(jУСТА – jСЛА)/ jУСТА (38)
Дистанцию безопасности DАВ в период снижения скорости обгоняющего автомобиля А можно определить по формуле:
DAB = (T1A1 +Т2А+0.5* Т3А1)*VA+VA2/(2* jУСТА) –
– ( T2В +0.5* Т3В)*VВ – VВ2/(2* jУСТВ). (39)
Для определения параметров незавершенного обгона прежде всего необходимо установить момент времени, когда обгоняющий автомобиль А сможет начать перестроение из левого в правый ряд. Рассмотрим методику определения этого момента времени на примере,

когда незавершенный обгон производится при попытке осуществить обгон с ходу (рис. 7).
Построение выполнено в предположении, что сигнал опасности появился, когда обгоняющий автомобиль А, двигаясь по полосе встречного движения, приблизился к обгоняемому на расстояние d*; этот момент на шкале времени обозначен точкой t0, а положение передней части автомобиля А и. задней части автомобиля В, соответственно, точками а0 и b0. Спустя промежуток времени T1A1+T2A (точка t1) начнётся нарастание замедления и снижение скорости автомобиля А, в точке t2, его замедление достигает величины jСЛА.
Перемещение по времени передней части автомобиля А при служебном торможении показано кривой а0 – а6; в точке а6 VA = 0 (методика расчёта изложена в п.3.1.). Штриховой линией с0 - с6 отмечено расстояние между автомобилями А и В, которое при внезапном торможении автомобиля В обеспечит остановку автомобиля А на расстоянии запаса S3 . Для построения кривой с0 – с6 от линии а0- а6 откладывают дистанцию безопасности DАВ, которую вычисляют по формуле (39) с учетом уменьшения скорости автомобиля А от V1 до V6. Положительные значения откладывают вправо от линии а0 – а6, а отрицательные – влево.
Момент времени tF, когда обгоняющий автомобиль А может начинать перестроение в правый ряд, определяют графически по точке F пересечения кривой а – а6, отражающей перемещение по времени передней части автомобиля А и кривой с0- с6, отражающей безопасное расстояние между ТС А и В, обеспечивающее отсутствие столкновения этих автомобилей.
Если при перестроении процесс торможения автомобиля А прекращается и водитель убирает ногу с педали тормоза, то дистанцию безопасности DАВ
* – принять d = (0,4… 0,8) DAB

необходимо увеличить, в этом случае её следует находить по формуле (4), а величины SAО и SBТП определять из условий движения в потоке (с учётом максимальной интенсивности торможения).
Время и путь незавершенного обгона считаются с начала обгона (при обгоне с ходу это точка О на рис.5, а при обгоне после выжидания – О1 на рис.6) до момента, когда обгоняющий автомобиль А возвратится в прежний ряд.
Взаимное положение ТС до момента, когда обгоняющий автомобиль А, прервав обгон может начинать перестроение в правый ряд, зависит от скоростей движения, длины обоих ТС, момента начала торможения обгоняющего и интенсивности его торможения.
На рис.7 точка F пересечения кривых_ а0- а6 и с0-с6 расположена слева от линии движения задней части автомобиля В, значит автомобиль А в этот момент движется за автомобилем В на достаточной дистанции и может начинать перестроение в свой ряд.
На рис.8,а и 8,б показаны варианты, когда точка F находится справа от линии движения задней части ТС В, это говорит о том, что автомобиль В мешает перестроению. Водитель автомобиля А должен отстать от автомобиля В; он может продолжить торможение или прервать его и двигаться со скоростью меньше, чем у автомобиля В, а перестроение в свой ряд сможет начинать в точке F1, когда автомобиль В опередит А на расстояние запаса SЗ.
На рис.8,б показан вариант, когда даже при остановке автомобиля А (точка а6) справа от него будет находиться автомобиль В, а чтобы начать перестроение, необходимо выждать, пока освободится правый ряд, и на расстоянии запаса S3 начинать перестроение с разгоном. В этом случае желательно оценить целесообразность прерывания обгона.
Возможен вариант, когда в результате расчета точка а6 (момент остановки автомобиля А ) окажется справа от линий, определяющих перемещение автомобиля В. Это говорит о том, что при данном сочетании исходных факторов автомобиль А обогнал автомобиль В и, вероятнее всего не следовало прерывать обгон.
Рис.7 следует дополнить линиями движения встречного ТС.
Режим движения при перестроении с момента времени tF (служебное торможение, установившееся движение или разгон) следует выбрать самостоятельно в зависимости от положения и взаимных скоростей участников движения.