
Категории:
АстрономияБиология
География
Другие языки
Интернет
Информатика
История
Культура
Литература
Логика
Математика
Медицина
Механика
Охрана труда
Педагогика
Политика
Право
Психология
Религия
Риторика
Социология
Спорт
Строительство
Технология
Транспорт
Физика
Философия
Финансы
Химия
Экология
Экономика
Электроника
Оценка качества переходного процесса 33
Определение необходимой скорости вращения 8
Определение мощности 8
Выбор электродвигателя по каталожным данным 9
Проверка электродвигателя по условию перегрузки 9
Выбор управляемого преобразователя 10
Выбор согласующего трансформатора 11
Выбор датчика тока 11
Выбор уравнительного реактора 12
Выбор тахогенератора 12
1.7. Расчет параметров цепи «тиристорный выпрямитель -двигатель постоянного тока» 12
Обоснование необходимости применения замкнутой системы управления электроприводом 14
1.9. Выводы 15
РАЗДЕЛ 2. РАСЧЕТ СТАТИКИ ЭЛЕКТРОПРИВОДА 17
Составление схем для расчета системы управления электроприводом 17
Определение коэффициента обратной связи по скорости 17
Определение максимального напряжения задания задатчика скорости и коэффициента усиления усилителя 18
Определение коэффициента обратной связи по ток 19
Определение коэффициента усиления суммирующего усилителя 20
Построение статической характеристики электропривода для замкнутой и разомкнутой систем управления 21
Выводы 23
РАЗДЕЛ 3. РАСЧЕТ ДИНАМИКИ ЭЛЕКТРОПРИВОДА 23
Составление структурной схемы электропривода для расчета динамики 23
Составление передаточных функций элементов 24
Составление передаточной функции двигателя постоянного тока 24
Составление передаточной функции тиристорного преобразователя 25
Составление передаточной функции цепи обратной связи по скорости 26
Составление передаточной функции системы 26
Проверка устойчивости системы электропривода 27
Синтез корректирующего устройства 28
Построение переходного процесса в системе электропривода 32
Оценка качества переходного процесса 33
3.8.Выводы 34
ВЫВОДЫ ПО КУРСОВОМУ ПРОЕКТУ 35
СПИСОК ЛИТЕРАТУРЫ 36
ВВЕДЕНИЕ
Для приведения в движение большинства рабочих машин необходима механическая энергия. Источником механической энергии чаще всего является электропривод, осуществляющий преобразование электрической энергии в механическую.
Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов.
Электропривод – это электромеханическая система, состоящая из электромеханического преобразователя, преобразователя электрической энергии, преобразователя механической энергии, информационных преобразователей и управляющего устройства, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. В отдельных случаях в этой системе могут отсутствовать преобразователя электрической энергии и преобразователя механической энергии.
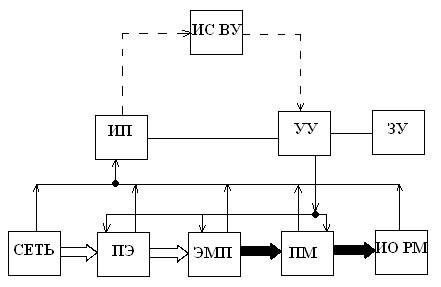
Рис. 1 Структура электропривода.
Преобразователь электрической энергии преобразует род тока, напряжение, частоту и изменяет показатели качества электрической энергии. Он предназначен для создания управляющего воздействия ЭМП.
Электромеханический преобразователь является основной частью ЭП, он предназначен для преобразования электрической энергии в механическую, чаще всего это электродвигатель.
Преобразователь механической энергии предназначен для передачи механической энергии от электродвигательного устройства к ОИ РМ и согласования вида скоростей и их движения.
Управляющее устройство на основе информации получаемой по каналам связи от ИП и задающего устройства управляет ПЭ, ЭМП, ПМ.
Параметрами электропривода являются: скорость, угол поворота выходного вала, ток двигателя, момент на валу, диапазон регулирования, жесткость механической характеристики, электромагнитная и электромеханическая постоянные времени.
Наибольший интерес представляют регулируемые ЭП, которые позволяют в широком диапазоне скоростей управлять ИО РМ при высоком качестве статических и динамических характеристик привода. Для управления электродвигателем в них применяются управляемые тиристорные и транзисторные преобразователи. Использование обратных связей позволяет сформировать необходимые статические и динамические характеристики и обеспечить защиту ЭП от перегрузок.
ЗАДАНИЕ.
- Требования к электроприводу.
| Показатели | №3 |
| Диапазон регулирования угловой скорости D | |
| Статизм регулирования угловой скорости не более dзад, % | |
| Допустимое перерегулирование угловой скорости не более s, % | |
| Время регулирования не более tр, с | |
| Допустимое число колебаний не более Nр |
- Данные механизма при кратковременном режиме работы.
| Показатели | №38 | |
| Моменты сопротивления на валу, Н×м | ММ1 | |
| ММ2 | ||
| ММ3нач | ||
| ММ3кон | ||
| ММ4 | ||
| Интервалы времени, мин | t1 | |
| t2 | ||
| t3 | ||
| t4 | ||
| Момент инерции механизма Jм, кг×м2 | ||
| Максимальная угловая скорость механизма wМmax, с-1 |
- Данные редуктора.
| Показатели | |
| Передаточное отношение iп | |
| КПД hп | 0,98 |
РАЗДЕЛ 1. ВЫБОР ЭЛЕКТРООБОРУДОВАНИЯ
Выбор двигателя будем проводить на основе метода эквивалентного момента.
Выбор электрооборудования включает следующие этапы:
• анализ характера изменения возмущающих моментов;
• расчет мощности и выбор электродвигателя по требуемым максимальным значениям параметров движения;
• проверка правильности выбора электродвигателя по перегрузочной способности и тепловому режиму;
• выбор элементов силового комплектного тиристорного преобразователя;
• расчет параметров системы тиристорный преобразователь -двигатель.
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
1.1.1. Определение режима работы.
Кратковременный режим работы (S2) - это режим, при котором периоды неизменной номинальной нагрузки чередуются с периодами отключения машины; при этом периоды нагрузки не настолько длительны, чтобы превышения температуры машины могли достигнуть установившихся значений, а периоды остановки настолько длительны, что все части ее охлаждаются до температуры окружающей среды.
Стандартизованы следующие продолжительности рабочего периода: 10, 30, 60 и 90 мин. Они указываются в обозначении режима, например, S2-10 мин.
В подобном режиме работают электродвигатели привода механизмов разводки мостов, подъема щитов плотин, опускания шлюзов, поворота лотков в инкубаторах и др.
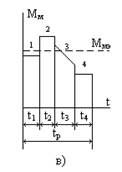 Рис. 2 Нагрузочная диаграмма механизма.
Рис. 2 Нагрузочная диаграмма механизма.
Определим время работы электродвигателя:

1.1.2. Расчет эквивалентного момента на валу.
В случае если нагрузочная диаграмма содержит наклонные трапецеидальные участки, их надо предварительно заменить эквивалентными ступенями.
 Рассчитаем эквивалентный момент на валу двигателя:
Рассчитаем эквивалентный момент на валу двигателя:


Определим эквивалентный момент на валу двигателя (коэффициент запаса Кз=1,2):

1.1.3. Определение необходимой скорости вращения.
Найдем максимальную угловую скорость электродвигателя:

Найдем максимальную частоту вращения электродвигателя:

1.1.4. Определение мощности.
Рассчитаем эквивалентную мощность Рэкв на валу двигателя при наибольшей угловой скорости:

Определим расчетную мощность на валу электродвигателя при кратковременном режиме:

|


|

|
1.1.5. Выбор электродвигателя по каталожным данным.
Выбор двигателя по частоте вращения и по мощности производим по условиям:




Выбираем двигатель серии ПБСТ-53 (номинальная скорость  )
)
Мощность 
Напряжение 
Ток 
Момент 
Магнитный поток 
КПД 
Момент инерции 
Число витков обмоток якоря 
Сопротивление якоря при 15 оС 
Сопротивление добавочных полюсов при 15 оС 
Число витков обмотки возбуждения 
Сопротивление обмотки возбуждения при 15 оС 
Постоянная времени нагрева 
1.1.6. Проверка электродвигателя по условию перегрузки.
Для того чтобы двигатель не был перегружен и смог разогнаться до номинальной скорости, должно соблюдаться условие:

Определим максимальный момент электродвигателя:

Определим наибольший за рабочий цикл момент сопротивления на валу электродвигателя (приведенный к валу двигателя):

Условие выполняется. Двигатель пригоден к работе с данной нагрузкой.
1.2. Выбор управляемого преобразователя
При проектировании электропривода выбор тиристорного преобразователя производится с учетом возможной его нагрузки по току:
Id ном ³ Кзап×Iпот
Коэффициент запаса Кзап =1,2
Определим сопротивление щеточных контактов:

Определим сопротивление якорной цепи двигателя (коэффициент, учитывающий увеличение сопротивления при нагреве обмотки якоря двигателя bт =1,54):

Определим номинальную скорость вращения электродвигателя:

Определяем С, соответствующее номинальному значению тока возбуждения и потока по паспортным данным двигателя для установившегося номинального режима:

Находим рабочий ток двигателя:


Должно выполнятся:
Id ном ³ 30,103
Для питания электродвигателя от сети выберем трехфазный комплектный вентильный преобразователь серии УКЭ-Л-3101-37-2-5-УХЛ4 с параметрами:


Коэффициент передачи двигателя:

1.3. Выбор согласующего трансформатора
Выбранному тиристорному преобразователю соответствует комплектный трехфазный трансформатор ТСП-16/0.7-74У4-660-205 В с параметрами:
Потери мощности в опыте короткого замыкания DРкз=550Вт
Напряжение вторичной обмотки трансформатора U2ф=205В
Номинальное напряжение в опыте короткого замыкания Uкз=5,2%
1.4. Выбор датчика тока
Выбор датчика тока производится по номинальному выпрямленному току преобразователя  .
.
Выберем датчик тока серии LA25P с параметрами:
Измерительное сопротивление 
Коэффициент трансформации 
Найдем максимальную ЭДС тиристорного преобразователя (коэффициент схемы выпрямления  ):
):

Найдем эквивалентное сопротивление трансформатора, обусловленное перекрытием тока в фазах преобразователя при коммутации вентилей:

Найдем активное сопротивление трансформатора:

Найдем сопротивление шин:

Найдем полное активное сопротивление якорной цепи:

Найдем коэффициент передачи обратной связи по току:

1.5. Выбор уравнительного реактора
Найдем допустимый статический уравнительный ток

Найдем индуктивность уравнительных дросселей, ограничивающих среднее значение уравнительного тока (нормированное значение уравнительного тока  , частота питающей сети
, частота питающей сети  ):
):

1.6. Выбор тахогенератора.
Электродвигатели серии ПБСТ оснащаются встроенными тахогенераторами серии ТС-1М.
Номинальная частота вращения тахогенератора 
Номинальная ЭДС тахогенератора 
Определим коэффициент передачи тахогенератора:

1.7. Расчет параметров цепи тиристорный преобразователь - двигатель.
Рассчитаем сопротивление якорной цепи двигателя:

Рассчитаем активное сопротивление трансформатора:
Рассчитаем максимальную ЭДС тиристорного преобразователя:
Рассчитаем ЭДС двигателя при рабочей нагрузке:

Рассчитаем коэффициент усиления тиристорного преобразователя при использовании системы с пилообразным напряжением (максимальное допустимое напряжение управления Uуmax = 10 В):

Рассчитаем эквивалентное сопротивление, обусловленное перекрытием тока в фазах преобразователя:
Найдем полное активное сопротивление:
Рассчитаем индуктивность обмотки якоря двигателя (для двигателей серии ПБСТ число пар полюсов р=2, g=0,25):

Рассчитаем индуктивное сопротивление фазы трансформатора, приведенное ко вторичной обмотке (kсхI =0,82):

Рассчитаем индуктивность рассеяния трансформатора:

Суммарная индуктивность якорной цепи:

Найдем электромагнитную постоянную якорной цепи:

Найдем полный приведенный момент инерции системы:

Найдем электромеханическую постоянную:

1.8. Обоснование необходимости применения замкнутой системы управления электроприводом.
Для обоснования применения замкнутой системы электропривода необходимо найти заданное допустимое снижение угловой скорости электропривода, абсолютное снижение угловой скорости электропривода в разомкнутой системе и сравнить их между собой.
Найдем угловую скорость идеального холостого хода на нижней границе диапазона:

Найдем угловую скорость идеального холостого хода на верхней границе диапазона:

Находим заданное абсолютное снижение угловой скорости электропривода при номинальной нагрузке:

Находим действительное абсолютное снижение угловой скорости электропривода в разомкнутой системе:

Применение замкнутой системы управления, необходимо, если соблюдается условие:
Dwр > Dwз ,
Данное условие выполняется, следовательно для получения характеристик ЭП, удовлетворяющих заданным требования, необходимо применить замкнутую систему управления ЭП.
Найдем статизм разомкнутой системы по отношению к максимальной скорости идеального холостого хода:

Найдем статизм замкнутой системы по отношению к минимальной скорости холостого хода:

Найдем статизм разомкнутой системы:

1.9. Выводы.
В данной главе сделали выбор элементов системы электропривода: электродвигателя (с проверкой его по перегрузке) и тахогенаратора, управляемого выпрямителя, согласующего трансформатора, сглаживающего реактора; рассчитали параметры якорной цепи системы «преобразователь-двигатель»; обосновали необходимость применения замкнутой системы управления электроприводом.
Для удобства дальнейших расчетов запишем все найденные значения в таблицу.
| Название величины | Обозначение | Единицы | Значение |
| Напряжение питающей сети | Uc | В | |
| Частота питающей сети | fс | Гц | |
| Максимальное напряжение управления | Uуmax | В | |
| Эквивалентный момент на валу двигателя | Мэкв | Н×м | 48,475 |
| Диапазон регулирования | D | - | |
| Передаточное число редуктора | i | - | |
| Максимальная угловая скорость двигателя | wмах | с-1 | |
| Максимальная частота вращения двигателя | nмах | об/мин | 993,127 |
| Максимальная угловая скорость механизма | wммах | с-1 | |
| Параметры двигателя | |||
| Расчетная мощность на валу двигателя | Ррасч | Вт | 3,187 |
| Коэффициент запаса | Кз | - | 1,2 |
| Коэффициент завышения мощности | Кзав | - | 1,2 |
| Коэффициент допустимой перегрузочной способности двигателя | Кдп | - | |
| Номинальная мощность двигателя (табл.) | Рном | кВт | 3,3 |
| Номинальная частота вращения двигателя (табл.) | nном | об/мин | |
| Номинальная угловая скорость двигателя (табл.) | wном | с-1 | 104,72 |
| Номинальное напряжение питания (табл.) | Uном | В | |
| Номинальный ток двигателя (табл.) | Iном | А | 16,6 |
| Сопротивление якорной цепи двигателя (табл.) | Rяцд | Ом | 1,063 |
| Конструктивный коэффициент электродвигателя | С | В×с | 1,932 |
| Рабочий ток двигателя | Iпот | А | 25,086 |
| Коэффициент передачи двигателя (1 / С) | kд | 1/ В×с | 0,518 |
| Параметры тиристорного преобразователя | |||
| Номинальный выпрямленный ток | Idном | А | |
| Номинальное выпрямленное напряжение | Udном | В | |
| Коэффициент усиления преобразователя | kтп | В/В | 25,842 |
| Коэффициент запаса по току преобразователя | Кзап | - | 1,2 |
| Параметры датчика тока | |||
| Номинальный ток датчика тока | IномДТ | А | |
| Сопротивление измерительного резистора | Rизм | Ом | |
| Коэффициент передачи датчика тока | kдт | - | 0,0009729 |
| Параметры тахогенератора | |||
| Номинальная частота вращения тахогенератора | n | об/мин | |
| Номинальная ЭДС тахогенератора | eтг | В | |
| Коэффициент передачи тахогенератора | kтг | В×с | 0,955 |
| Параметры цепи «преобразователь-двигатель постоянного тока» | |||
| Эквивалентное активное сопротивление якорной цепи | Rэ | Ом | 1,532 |
| Эквивалентное индуктивное сопротивление якорной цепи | Lэ | Гн | 0,201 |
| Электромагнитная постоянная времени | Tяц | с | 0,131 |
| Момент инерции системы приведенный | J | кг×м2 | 0,993 |
| Электромеханическая постоянная времени | Tмц | с | 0,407 |
| Заданный статизм системы (требуемый статизм) | d треб (dз) | - | 0,08 |
| Полученный статизм разомкнутой системы | dр | - | 0,41 |
раздел 2. Расчет статики электропривода
В данном разделе необходимо построить статическую характеристику электропривода в замкнутой системе управления, а также рассчитать коэффициенты обратных связей по скорости и току, коэффициент усиления промежуточного усилителя и максимальное напряжение задатчика скорости.
Построить электромеханическую характеристику электропривода.
2.1. Составление схем для расчета системы управления электроприводом.

Рис. 3 Структурная схема тиристорного электропривода постоянного тока.
Двигатель представлен апериодическим и интегрирующим звеньями, охваченными ООС по ЭДС двигателя, и безинерционным звеном. На двигатель действует возмущающее воздействие. Звенья преобразователя включены последовательно в цепь основного воздействия. На суммирующий усилитель подаются сигналы задатчика скорости и сигналы двух ООС – по скорости и по току. В цепь ОС по скорости входят: датчик скорости, фильтр и регулируемый коэффициент ОС по скорости. В цепь ОС по току входят: датчик тока и фильтр датчика тока, узел отсечки и регулируемый коэффициент ОС по току.
2.2. Определение коэффициента обратной связи по скорости.
На основе структурной схемы системы для расчета обратной связи по скорости составим упрощенную структурную схему, полагая:
- обратная связь по току не действует;
- рассматриваем установившийся режим работы.
 Рис. 4 Структурная схема для расчета коэффициента ОС по скорости.
Рис. 4 Структурная схема для расчета коэффициента ОС по скорости.
Напряжение U коэффициента усиления усилителя задания, соответствующее верхней границе диапазона примем Uзmax=10 В.
Определим коэффициент kнеобх:


Найдём коэффициент обратной связи по скорости:

Найдем регулируемый коэффициент обратной связи по скорости:

2.3. Определение максимального напряжения задания скорости и коэффициента усиления усилителя.
Определим коэффициент усиления усилителя:

Определим максимальное напряжение задания:


2.4. Определение коэффициента обратной связи по току.
Для электродвигателей постоянного тока значение предельно допустимого тока лежит в пределах Imax =(2¸3)×Iном.


Учитывая, что запаздывание в цепи обратной связи, обусловленное фильтрами на выходе датчиков, обычно мало и характер изменения самой выходной величины примерно идентичен характеру изменения выходного напряжения датчика, можно положить, что:
Тфдт=Тфтг
Тфтг – постоянная времени датчика скорости (Тфтг =0,004с)
Тфдт – постоянная времени датчика тока
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):

Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005)
Найдем полную постоянную времени тиристорного преобразователя:

Тогда

Определим регулируемый коэффициент обратной связи по току:


2.5. Определение коэффициентов усиления суммирующего усилителя.
Для канала по задающему воздействию коэффициент усиления суммирующего усилителя находится:

Из условия работы двигателя на максимальной требуемой угловой скорости вращения:

Для канала обратной связи по скорости коэффициент усиления суммирующего усилителя можно найти:

Из условия протекания в якорной цепи двигателя, при его работе на рассчитываемую нагрузку тока равного Iпот:

Для канала обратной связи по току коэффициент усиления суммирующего усилителя будет:

Сводная таблица параметров.
| Название величины | Обозначение | Единицы | Значение |
| Коэффициент регулируемой обратной связи по скорости | bс | - | 0,081 |
| Коэффициент регулируемой обратной связи по току | bт | - | 1,178 |
| Максимальное напряжение задатчика скорости | Uзmax | В | |
| Коэффициент усиления суммирующего усилителя по каналу задатчика скорости | kуз | - | |
| Коэффициент усиления суммирующего усилителя по каналу обратной связи по скорости | kуос | - | 1,237 |
| Коэффициент усиления суммирующего усилителя по каналу обратной связи по току | kут | - | 9,424 |
2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления.
В соответствии со схемой Рис. 4 и при учете всех обратных связей можно записать уравнение:

На первом участке при изменении тока от 0 до тока отсечки Iy действует только обратная связь по скорости Uoc . Этот участок строим по формуле:

При построении первой части статической характеристики необходимо найти точку холостого хода электропривода с координатами (Iя=0; w0), где w0 соответствует w0max и Uз=Uзmax, и точку (1) с координатами (Iу; w1). Остальные точки характеристики можно найти изменяя ток якоря Iя = (0 .. Iу).


Второй участок характеризуется вступлением в действие отрицательной обратной связи по току, которая увеличивает наклон (уменьшает жесткость) механической характеристики. Задаваясь током I2, немного большим чем Iу, можно найти вторую точку (2) характеристики на этом участке. Ее координаты (I2; w2):
 Найдем коэффициент передачи:
Найдем коэффициент передачи:



Найдем напряжение пробоя стабилитрона:


Третий участок статической характеристики строится по формуле при изменении Iя=(I2 .. Imax):





Напряжение задания в этом случае находится из условия w = w0рmax, Iя=0:

Строим статическую характеристику электропривода.

|
Рис. 5 Статическая характеристика ЭП.
2.7. Выводы по разделу.
В данном разделе определили коэффициенты обратных связей по скорости и току, максимальное напряжение задания задатчика скорости, коэффициенты промежуточного усилителя по каналам задающего воздействия и обратных связей, а также построены статические электромеханические характеристики электропривода в замкнутой и разомкнутой системе управления. Сделана оценка полученных характеристик на соответствие требованиям задания.
Раздел 3. Расчет динамики электропривода
В данном разделе рассматривается возможность получения динамических показателей работы спроектированного электропривода, в соответствии с заданными, т.е. строится и анализируется переходный процесс в системе электропривода.
Переходные процессы играют большую роль в работе ЭП и РМ. Характер их протекания предопределяет производительность машины, качество выпускаемой продукции, а также заметно сказывается на режимах работы ЭП. Вид переходного процесса зависит от свойств всех элементов привода и рабочей машины.
3.1. Составление структурной схемы электропривода для расчета динамики.
На основе функциональной схемы можно составить обобщенную структурную схему замкнутой системы электропривода со всеми обратными связями

|
Рис. 6 Обобщенная структурная схема замкнутой системы ЭП.
Ограничимся расчетом динамики системы, не учитывая задержанную обратную связь по току, вследствие ее нелинейности и сложности расчетов. Поэтому обобщенную схему можно представить, как:

|
Рис. 7 Упрощенная структурная схема замкнутой системы ЭП.
Упрощенная структурная схема представляет собой упрощенную математическую модель системы.
3.2. Составление передаточных функций элементов.
3.2.1. Составление передаточной функции двигателя постоянного тока.
В соответствии со структурной схемой тиристорного электропривода постоянного тока с учетом того, что обратная связь по току не действует, а момент статической нагрузки равен нулю, можно составить передаточную функцию двигателя постоянного тока независимого возбуждения:

Преобразуя данное выражение, получаем:

Приведем передаточную функцию к виду, удобному для логарифмирования

Тмц=0,407 4×Тяц=0,525, т.е.Тмц<4×Тяц, то передаточная функция двигателя будет представлена колебательным звеном

Где Т и  рассчитываются по формулам
рассчитываются по формулам
- фиктивная постоянная времени

T=0.231
- коэффициент затухания

 = 0,881
= 0,881

Рис. 8 Структурная схема двигателя по моменту.
На основании упрощенной структурной схемой замкнутой системы электропривода (Uз=const), запишем передаточную функцию двигателя по моменту:

Рассчитаем коэффициент передачи двигателя по моменту:

3.2.2. Составление передаточной функции тиристорного преобразователя.
Передаточную функцию тиристорного преобразователя представим в виде:

Тфдт – постоянная времени датчика тока
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):
Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005)
Найдем полную постоянную времени тиристорного преобразователя:
3.2.3. Составление передаточной функции цепи обратной связи по скорости.
В общем случае передаточную функцию цепи обратной связи по скорости можно записать:
W(p)=kтг×Wфтг(p)
Передаточную функцию цепи обратной связи по скорости можно записать в виде:

Вносим поправку в регулируемый коэффициент обратной связи по скорости:

Получаем (Тфтг =0,004 с.):

3.3 . Составление передаточной функции системы.
Имеем структурную схему системы электропривода постоянного тока с тиристорным управляемым выпрямителем (двигатель представлен колебательным звеном порядка):

|
Рис. 9 Расчетная схема ЭП.
Составим передаточную функцию разомкнутой системы:
Wраз(p)= Wу(p)×Wтп(p)×Wд(p)×Wocс(p)
Можно упростить:
(Ттп×р+1)×(Тфтг×р+1)=Тэс×p+1

Тогда

3.4. Проверка устойчивости системы электропривода.
Для расчета устойчивости системы регулирования применим метод построения логарифмических частотных характеристик. Неоходимым и достаточным условием устойчивости по Найквисту является пересечение ЛАЧХ разомкнутой системы оси абсцисс раньше, чем ЛФЧХ пересечет линию, соответствующую ее фазовому сдвигу –.

|
| ЛАЧХ разомкнутой системы: |

|

|

|

|

|
|
|

|

|
| ЛФЧХ разомкнутой системы: |

|

|

|

|
Рис. 10 Характеристики неустойчивой системы ЭП.
Из построенных ЛАЧХ и ЛФЧХ видно что система не устойчива, т.к. не удовлетворяет критерию устойчивости Найквиста. Поэтому будем вводить корректирующие устройства.
3.5. синтез корректирующего устройства.
Корректирующее устройство должно обеспечивать отсутствие статической ошибки регулирования, ограничить (не более заданного) перерегулирование и время регулирования.

|

|
Для нашей передаточной функции системы асимптотическая амплитудно-частотная логарифмическая характеристика будет иметь вид:

| АЛАЧХ разомкнутой системы: |

По номограммам Солодовникова находим:

|
| Необходимый запас устойчивости |

|
| АЛАЧХ желаемой системы: |

| АЛАЧХ корректирующего устройства: |

|

|
Рис. 11 АЛАЧХ скорректированной системы.

|
| ЛФЧХ разомкнутой системы: |

|

|

|
|
|

|
Рис. 12 ЛАЧХ и ЛФЧХ скорректированной системы
На рисунке представлено построение ЛАЧХ ЛФЧХ нашей системы, введя в нее корректирующее устройство, рассчитанное выше. Из данных характеристик по критерию Найквиста находим запасы по амплитуде и по фазе.
| Запас по амплитуде: |
| Запас по фазе: |


Как видим они удовлетворяют нашим требованиям. Значит можно перейти к построению переходного процесса в системе электропривода.
3.6. Построение переходного процесса в системе электропривода
Для построения переходного процесса системы управления электроприводом постоянного тока по управлению необходимо составить передаточную функцию замкнутой системы по управлению, пользуясь правилом:


|

|

|
Рис. 12 Переходная характеристика скорректированной системы.

|
| - установившееся значение. |

|
| -максимальное значение |
Из полученного графика переходного процесса системы (уже с введенным корректирующим устройством) видно, что мы имеем устойчивый переходный процесс. Время переходного процесса намного меньше заданного, что удовлетворяет нашим требованиям.
3.7. Оценка качества переходного процесса.
| 1. Максимальное динамическое отклонение: |
| - установившееся значение. |

|

|
| 2. Перерегулирование: |
| -максимальное значение |

|

|
| 3. Время регулирования: |

|
|
|

|

|

|

|
| 4. Степень затухания: |

|

|

|
| 5. Число колебаний: |
| 6. Показатель колебательности: |

|

|
| 7. Статическая ошибка (отклонение в установившемся режиме): |

|

|

|
Таблица сравнения показателей качества.
| Показатели | Обозначение | Заданные | Рассчитанные |
| Запас по амплитуде, дБ | La | 14,841 | |
| Запас по фазе, о | Lf | 86,324 | |
| Перерегулирование, % | smax | 0,15 | 0,068 |
| Время регулирования, с | tp | 0,674 | |
| Число колебаний, шт | Np | ||
| Степень затухания | y | ||
| Показатель колебательности | m | ||
| Максимальное отклонение | А1 | 0,065 | |
| Статическая ошибка | 0,04 | 0,0048 |
3.8. Выводы.
В данном разделе мы определили передаточные функции отдельных элементов системы электропривода, составили общую передаточную функцию в соответствии с расчетной структурной схемой, проверили систему на устойчивость, построили переходный процесс и определили показатели качества регулирования. Рассчитанные динамические показатели лучше заданных.
Выводы по курсовому проекту.
Первая часть курсового проекта посвящена выбору электрооборудования. Мы определяли мощность, скорость вращения, эквивалентный момент на валу электродвигателя. Затем по частоте вращения и по мощности произвели выбор электродвигателя:
 ( необходимо соблюдать эти условия )
( необходимо соблюдать эти условия )
После его выбора, мы проверили электродвигатель на перегрузки, для этого необходимо выполнение условий:

При выполнении этих условий, электродвигатель не будет перегружен и сможет разогнаться до номинальной скорости.
Дальше производился выбор управляемого преобразователя исходя из: 
Выбор согласующего трансформатора, датчика тока (по номинальному выпрямляемому току преобразователя), уравнительного реактора.
В конце первого раздела приведена сводная таблица данных, где можно наглядно увидеть параметры системы.
Во второй главе курсового проекта мы рассчитывали статику электропривода. Сюда входит определение коэффициента обратной связи по скорости (по току), коэффициента усиления, коэффициенты усиления суммирующего усилителя, которые так же приведены в таблице. Следующим шагом было построение статической характеристики электродвигателя в замкнутой и разомкнутой системах управления.
Третья часть КП представляет собой расчёт динамики электропривода. Первым шагом было составление структурной схемы ЭП. Затем мы составили ПФ системы в целом. Возникла необходимость проверить данную системы на устойчивость, это было сделано по критерию Найквиста. Система оказалась неустойчивой, следовательно нам необходимо синтезировать корректирующее устройство, при внедрении которого, мы получили бы устойчивую систему управления. После его внедрения мы видим, что появился запас устойчивости как по амплитуде, так и по фазе. Заключительным шагом мы построили график переходного процесса, по которому оценили качество переходного процесса. Все показатели качества удовлетворяют заданным.
Литература