
Категории:
АстрономияБиология
География
Другие языки
Интернет
Информатика
История
Культура
Литература
Логика
Математика
Медицина
Механика
Охрана труда
Педагогика
Политика
Право
Психология
Религия
Риторика
Социология
Спорт
Строительство
Технология
Транспорт
Физика
Философия
Финансы
Химия
Экология
Экономика
Электроника
Навигационный треугольник скоростей решается через проекции составляющих векторов на оси выбранной системы отсчета. По известным значениямV, U, у/,Sиу/клегко
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Цель работы: - изучение построения навигационного треугольника скоростей, а также ознакомление с принципом действия и программной имитацией навигационном) автомата НИ50-БМ.
Теоретическая часть
Перед выполнением практической части лабораторной работ ы следует ознакомиться со следующими вопросами:
1) Принцип ориентировки методом курео-воздушного счисления;
2) Построение навигационного треугольника скоростей;
3) Принцип действия навигационного автомата НИ50-ЬМ.
4) Методика имитационного моделирования;
Практическая часть
Рекомендуется выполнение лабораторной работы в следующем порядке:
1) Ознакомиться с кратким описанием работы программы;
2) Получить у преподавателя задание по маршруту «полета» (полетной карте) и задаться направлением осей условной системы координат1;
3) Ознакомиться с интерфейсом программы, и определить какие навигационные параметры необходимы для задания начальных условий;
4) Построить навигационный треугольник скоростей, учитывая масштаб карты, и вычислить расчетное время «полета»;
5) Ввести измеренные навигационные параметры и провести серию «полетов» - реализаций, проверяя правильность попадания в КИМ и сверяя расчетное время «полета» со временем посчитанным прог раммой;
6) Проанализировать полученные графики позиционных ошибок и дать теоретическое обоснование полученным результатам, сделат ь выводы.
7) ГКОРИЯ ВОПРОСА
7) Введение
Штурманские чадами, такие как определение координат точки места ЛА, времени и направления полета до заданной точки маршрута, определение путевого угла, отображение точки места ЛА на географической карте и другие, могут быть автоматизированы. Такие навигационные устройства называют навигационными автоматами или навигационными системами счисления пути (11CC1I). В основе построения класса таких навигационных систем лежит так называемый метод воздушного счисления пути.
7) Панпгацни методом курсо-воз душного счисления
В практике самолетовождения для определения местонахождения самолета применяют различные методы ориентировки. Ориентировка методом счисления пути заключается в расчете местонахождения самолета путем последовательного учета величины и направления пройденного пути от места вылета.
В зависимости от типа датчика скорости, информация которого используется для автоматического счисления пути, различают в основном два режима счисления:
курсо-доплеровское счисление, предусматривающее совместную работу ДИСС и HI |,ВМ с использованием курсовой информации;
воздушное (аэрометрическое) счисление, предусматривающее совместную работу системы воздушных сигналов и БЦВМ с использованием внешней информации о курсе, получаемой от бортового оборудования, например, от ИКВ.
1 Примером реализации метода воздушного счисления пути является навигационный автомат 111150-ЬМ. Суть его работы заключается в непрерывном интегрировании по времени нутевой скорости самолета W, относительно земной поверхности.
Известно соотношение:
W-V+U,
|Дс V - вектор истинной воздушной скорости ЛА; U - вектор скорости ветра, рисунке представлен навигационный треугольник скоростей (см. Рис. 1).
Здесь ОХУ - плоская горизонтальная система координат, ориентированная на се-
1сР (С) и восток (В); У, U, W - горизонтальные проекции соответственно векторов истинной воздушной скорости, скорости ветра и путевой скорости; у/ - истинный курс JIA; у/п - путевой угол ЛА; /Зсн - угол сноса; 8 - угол ветра.
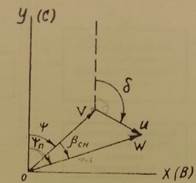
Рис. 1. Навигационный треугольник скоростей.
Навигационная задача сводится к решению навигационного треугольника скоростей, т.е. к определению путевой скорости через известные (или измеренные) значения векторов истинной воздушной скорости и скорости ветра.
Воздушное счисление пути является автономным методом, т.к. не зависит ни от условий видимости, ни от каких-либо наземных технических средств. При этом скорость и угол ветра могут быть заданы по радио или получены в полете бортовыми радиотехническими устройствами.
4) Структура имитационного комплекса
Структура программного комплекса для имитации навигационного автомата представлена на рисунке 2.
Программный комплекс, как видно из рисунка, состоит из следующих основных блоков:
8) блок инициализации;
9) блок моделирования СВС;
10) блок интегрирования;
блок пересчета; блок визуализации.
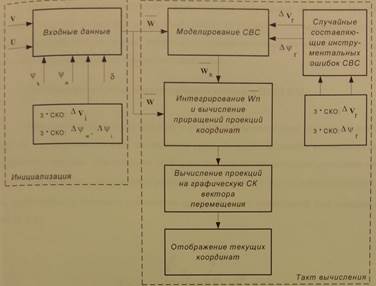
Рис. 2. Структура программного комплекса.
Блок инициализации подразумевает ввод идеальных значений модуля воздушной скорости V, угла карты
Истинного курса \\iu. Значения модуля скорости ветра U и угла ветра вводятся один раз и не меняются в течение полета. Также в данном блоке происходит ввод значений трех СКО составляющих инструментальной ошибки СВС. Такие составляющие ошибки как AVj - постоянная составляющая истинной воздушной скорости, Avj/j - постоянная составляющая истинного курса, Дц/„ I смещение нуля формируются один раз, а формирование случайных составляющих инструментальной ошибки AVr и Дуг происходит на каждом такте вычисления. В блоке моделирования СВС происходит формирование составляющих инструментальной ошибки системы и получение скорректированных значений истинной воздушной скорости и угла истинного курса ЛА. Блок интегрирования осуществляет интегрирование вычисленного значения вектора пУтевой скорости ЛА и сложение результата со значением вектора перемещения на предыдущем шаге интегрирования. Далее в блоке пересчета происходит пересчет полученных на каждом шаге интегрирования значений проекций вектора перемещения из условной системы координат в, так называемую, графическую систему координат, значения проекций, на которую и используются в блоке визуализации для отображения траектории. 4) Принцип действия навигационного автомата НИ50-БМ Навигационный автомат работает в условной прямоугольной системе координат ОХУ (см. 3). Эта система строится на полетной карте, которую позволяет визуализировать программный комплекс. Направление осей полетной карты относительно меридиана определяется углом карты у/к . Результатом решения навигационного треугольника скоростей является отображение в реальном времени на полетной карте траекторной информации о точке места J1A. Рис. 3. Условная система координат.
Навигационный треугольник скоростей решается через проекции составляющих векторов на оси выбранной системы отсчета. По известным значениямV, U, у/,Sиу/клегко
определить проекцииУх,У у,иUx, Ur-
Тогда скорости изменения координатX и УЛА определятся через эти проекции по Формулам:

Таким образом, если ЛА, находившийся в начальный момент времени в точке с коор- инатами Хо, Yo,выполняет полет с постоянным курсом и скоростью, то через время tего [юрдинаты Xи Yмогут быть получены в соответствие с выражениями:

Для решения этих уравнений необходимо задавать следующие параметры:
5) координаты исходного пункта маршрута^, Yo',
6) истинную воздушную скорость JIA;
7) истинный курс J1A;
8) угол карты Щщ;
9) скорость ветра U и угол ветра 8.
При моделировании метода на стенде модуль скорости ветра задается постоянным, либо флуктуирует вокруг среднего значения для диапазона широт, в котором находится JIA.