Система динамической стабилизации
Практическое занятие №6
Тема:Системы удержания плавучих буровых средств (ПБС) на точке бурения.
План:
1. Якорные системы удержания
2. Системы динамической стабилизации.
Цель:закрепить полученные знания на лекции, ознакомить студентов с системами удержания плавучих буровых средств на точке бурения.
Контрольные вопросы:
1. Какие системы удержания вы знаете?
2. Из чего состоит якорная система?
3. Из чего состоит система динамической стабилизации?.
4. Чем отличаются эти две системы удержания ПБС ?
5. По каким причинам на глубинах более 200 м используют динамические системы стабилизации?
Глоссарий:
Точка бурения – заранее выбранное и подготовленное место на морском месторождении нефти или газа, где помещают плавучую буровую установку или стационарную буровую платформу.
Плавучая (самоподъемная) буровая установка – плавучий понтон, над которым расположена буровая вышка. На нем размещается буровое и вспомогательное оборудование, многоэтажная рубка с каютами для экипажа и рабочих, электростанция и склады.
Стабилизация динамическая – автоматизированный комплекс, включающий в себя энергетическую установку, двигатели, подруливающие устройства и компьютеризированную систему управления.
Лебёдка - механизм, тяговое усилие которого передается посредством каната, цепи, троса или иного гибкого элемента от приводного барабана.
Превентор — противовыбросовое устройство, устанавливаемое на устье скважины с целью её герметизации в чрезвычайных ситуациях при бурении.
Системы предназначены для удержания в заданных пределах отклонения бурового плавучего средства (БС и ППБУ) от оси бурящейся и эксплуатирующей скважины в горизонтальном направлении.
Обычно горизонтальное перемещение бурового плавучего средства не превышает 5-6 % глубины моря.
Радиус максимального отклонения R=0.06H,
Где 0,06 – максимальное относительное отклонение, ограничиваемое напряжениями в трубах водоотделяющей колонны и углом отклонения нижнего шарнирного и шарового или другой конструкции соединения; Н- глубина моря, м.
В зависимости от глубины моря Н все ПБС оснащают одной из следующих возможных систем удержания на точке бурения:
· При глубинах моря до 200м – с помощью якорных цепей или тросов, либо комбинированной системы (якорных цепей и тросов);
· На глубинах моря более 200м – с помощью динамической системы стабилизации (динамического позицирования).
Якорные системы удержания
Буровое плавсредство и систему заякоривания рассматривают как единый комплекс, за исключением случаев экстремальных погодных условий.
Система заякоривания включает якорные цепи, лебедку, стопорное устройство, роульс (устройство для изменения направления перемещения якорного троса). В зависимости от местных условий, характеристики бурового плавсредства и других факторов применяют различные схемы расположения якорных цепей или канатов относительно ПБС.
На рис. 1 показаны шесть наиболее распространенных в мировой практике вариантов заякоривания при воздействии нагрузок с любой стороны; n- число якорных канатов.
Якорные цепи или тросы выбирают в зависимости от ожидаемой нагрузки на них, глубины моря, характеристики рабочего оборудования, стоимости, наличия пространства для палубных устройств и других факторов.
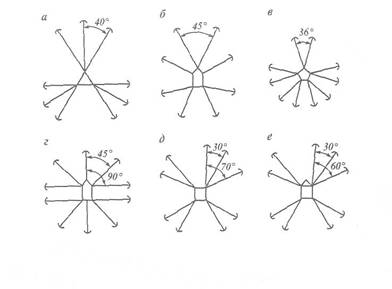
Рис. 1 - Типовых вариантов систем заякоривания: а,б,в – симметричные системы соответственно с n-9,8,10; г,д,е – системы с якорными канатами (n =8), расположенными соответственно под углом 45-900 друг к другу, порд углом 30-700 к оси платформы и под углом 30-600 к продольной оси судна.
Для заякоривания применяют два типа плоскозвенных цепей с распоркой: цепь со сваренным встык звеньями и замковую цепь. В большинстве случаев для заякоривания применяют металлические канаты диаметром 57-76 мм (иногда 90мм). Преимущества металлических канатов: масса каната в морской воде ниже стоимости цепи. Недостаток металлического каната заключается в том, что вследствие малой массы требуется большое развертывание троса до необходимой величины тангенциальной кривой провисания, а также в случае выхода каната из строя его следует заменять по всей длине.
Якорные системы оснащают комплексом оборудования для регулирования натяжения якорных канатов, который включает тензометры и записывающую аппаратуру, непрерывно управляющую натяжением якорного каната и извещающую оператора об изменении высоты волны или направления ветра.
Системой управляют с пульта на основе информации, получаемой от датчиков, устанавливаемых на тросах.
Таблица 1. Проектные параметры и условия, используемые при определении систем заякоривания БПС
| Условия бурения | Нормальное бурение Бурение в осложненных условиях | Перерыв в бурении | Критические погодные условия | |
| Параметр якорных канатов | Максимальное натяжение | 0,3 от критического | 0,3-0,5 от критического | 0,5 от критического (необходимо стравливание якорных канатов) |
| Провисание с подветренной стороны | Номинальное | Эквивалентно двойному полному провисанию каната с подветренной стороны | ||
| Максимальное смещение по горизонтали, % от глубины моря | Неограничен-ное | |||
| Условия работ при наличии бурового стояка | Положение стояка | Присоединен | Отсоединен | |
| Максимальный угол отклонения в шарнирном соединении, градус | 4 <10 | |||
| Промывочная жидкость | Буровой раствор | Необходимости заполнение морской водой | ||
| Выполняемые работы | Бурение, спуск обсадных труб, установка превен-тора, испытание скважин Спускоподъемные операции, подъем стояка, бурение цементных пробок и другие буровые работы | При стояке, подготовленном к отсоединению, буровые работы не проводят. Работы выполняют при подходящих погодных условиях | Не проводят никаких работ, за исключением маневрирования с якорными канатами. На буровой не должно быть людей |
Система динамической стабилизации.
На глубинах морей более 200 м якорные системы стабилизации не обеспечивают требуемые допускаемые отклонения ПБС о вертикальной оси бурящейся скважины, становятся массивными, и их применение неэффективно. По этим причинам на глубинах более 200 м используют динамические системы стабилизации (динамического позицирования), которые по сравнению с якорными системами удержания имеют следующие преимущества:
· Обеспечивают требуемую технологией бурения точность позицирования ПБС;
· Осуществляют быстрое изменение курса БС или ППБУ в целях уменьшения бортовой и вертикальной качек;
· Обеспечивают быстрый уход с точки бурения и возврат на нее ПБС.
Система динамической стабилизации представляет собой замкнутую цепь автоматического управления. Она включает:
1. Цепь обратной связи с датчикам, определяющими координаты продольного и поперечного перемещения по осям х, у и угол поворота ПБС относительно принятых неподвижных координат;
2. блок сравнения, который определяет отклонения х, у и действующего положения ПБС от его начального расчетного положения х0, у0, 0 ;
3. пульты управления, имеющие прямые и обратные связи с двигателями и гребными винтами, рассчитывающие и подающее командного пункта на двигатели и гребные винты команды для возвращения ПБС в начальное положение.;
4. подруливающие устройства (двигателей и гребных винтов), обеспечивающие перемещение судна на величину х, у и и возвращение егов начальное положение.
На автоматизированном пункте управления универсальная ЭВМ по цепи обратной связи получает данные от внешних датчиков о положении ПБС в определенный момент. При этом угол поворота определяют гидрокомпасом, а координаты х, у вычисляются системой акустического измерения АМS. Эти данные имеют высокую точность, их используют в системе динамической стабилизации.
В системе динамической стабилизации имеются две ЭВМ: одна работает, а вторая в резерве. Система автоматической стабилизации включается в работу и контролируется оператором с главного пульта управления.
Тесты:
1. На какой глубине используют динамические системы стабилизации?
А) 200 м;
Б) 300 м;
В) 400 м;
Г) 500 м ;
Д) 600 м ;
2. Чем определяют угол поворота?
А) Гидрокомпасом;
Б) Компасом;
В) Угломером;
Г) Циркулем;
Д) Поворотным механизмом;
3. Что представляет собой система динамической стабилизации?
А) Замкнутую систему;
Б) Разомкнутую систему;
В) Последовательную систему;
Г) Параллельную систему;
Д) Ничего не представляет;
4. Преимущества металлических канатов?
А) масса каната в морской воде ниже стоимости цепи;
Б) малая масса требует большое развертывание троса до необходимой величины тангенциальной кривой провисания;
В) выход каната из строя его следует заменять по всей длине;
Г) пульты управления, имеющие прямые и обратные связи с двигателями и гребными винтами;
Д) нет преимуществ;
5. Что включает в себя система заякоривания?
А) Стопорное устройство;
Б) Гидрокомпасом;
В) Цепь обратной связи с датчикам;
Г) Подруливающие устройства;
Д) Блок сравнения.
Список использованной литературы:
1. Котик Е.П., Котик П.Т. Разработка, освоение и эксплуатация морских месторождений . 2 том, -Актобе-, 2010 – 564 стр.
2. Бабич В.А., Лисагор О.И., Галкин А.Г. Оборудование для бурения инженерно-геологических скважин на море и на шельфе. - Рига: ВНИИМоргео, 1996. - 127 с.
3. Золотухин А.Б., Гудместад О.Т., Ермаков А.И. и др. Основы разработки шельфовых нефтегазовых месторождений и строительство морских сооружений в Арктике. Учебное пособие. - М: Изд-во «Нефть и газ» РГУНиГ, 2000. - 770 с.
4.Эстрин Ю.Я. Техника и технология освоения нефтегазовых ресурсов континентального шельфа. - М.: ВНТИЦентр, 1989.