Дезаксиальные станки-качалки
ГОСТ 5866-76 предусматривает изготовление станков-качалок 13 типоразмеров. Каждый тип станка-качалки характеризуется максимальными допускаемыми нагрузками на устьевой шток, длиной хода устьевого штока и крутящим моментом на кривошипном валу редуктора, числом двойных ходов балансира в минуту.
За рубежом станки-качалки обычной конструкции производятся по спецификации 11Е стандарта АНИ. Диапазон показателей:
1) грузоподъемность от2 до 20 т;
2) длина хода от 0,5 до 6,0 м;
3) крутящий момент до 120 кН*м.
В России наиболее известны фирмы "Lufkin" (США), "Indystrial" (Румыния).
Наряду с аксиальными (обычными) кривошипно-шатунными механизмами (станки-качалки типа СК), у нас в стране выпускаются станки-качалки с дезаксиальной схемой (типа СКД). За рубежом (в особенности в США) практически все станки-качалки выпускаются с небольшим дезаксиалом.
Дезаксиал h определяется местом расположения кривошипного центра (точки 0) относительно прямой В1В2 (рисунок 1.2), где В 1 и В2 -крайнее верхнее и нижнее положения кривошипа.
Если точка О расположена на прямой В1В2, то механизм аксиальный (обычный), если справа от прямой В1В2, то механизм с положительным дезаксиалом, если слева, то механизм с отрицательным дезаксиалом. Основное их отличие в том, что у аксиального станка-качалки время хода точки подвеса штанг (ТПШ) вверх и вниз равно. Поэтому такие станки-качалки называют симметричными. Однако нагружение ТПШ за время хода вверх и вниз разное, что обусловлено работой штангового насоса. При ходе вверх станок-качалка производит работу по поднятию штанговой колонны и столба жидкости, при ходе вниз штанговая колонна идет под собственным весом, а вес столба жидкости передается на трубы. Очевидно, что если средняя скорость движения ТПШ при ходе вверх будет меньше, чем при ходе вниз, то это позволит уменьшить ускорения, а следовательно, и динамические нагрузки, действующие на штанговую колонну при ходе вверх, т.е. в тот период, когда она наиболее нагружена.
Исходя из этих соображений станки-качалки выполняют с небольшим отрицательным дезаксиалом, у которых время хода вверх больше времени хода вниз. Слишком большой дезаксиал также нежелателен, так как при этом происходит увеличение утечек через плунжер при ходе вверх, появляется возможность зависания колонны штанг в трубах при ходе вниз за счет большей скорости спуска, особенно при ее работе в наклонно направленных скважинах и скважинах с отложениями парафина или гидратов.
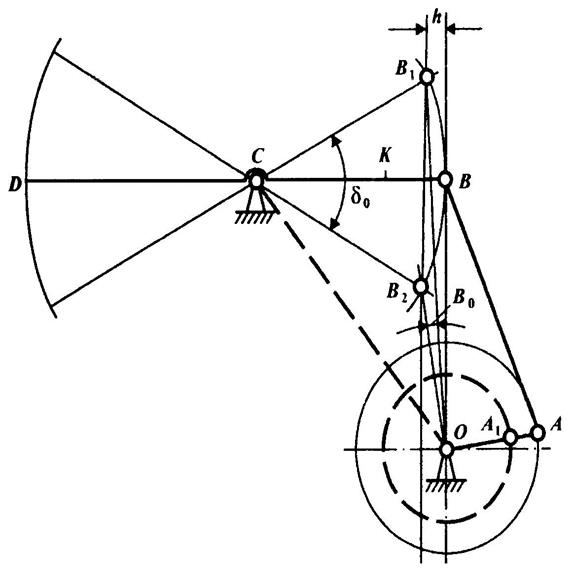
Рисунок 1.2 - Кинематическая схема преобразующего механизма дезаксиальных станков- качалок
1.1.1.3 Станки-качалки с одноплечным балансиром
В связи с появлением на промыслах большого количества зарубежного оборудования можно встретить станки-качалки с одноплечным балансиром типа МАРК фирмы "Lufkin" (США), а также отечественных производителей (Уралтрансмаш, г. Екатеринбург) (рисунок 1.3). Особенностью подобных приводов является использование кинематической схемы с одноплечным балансиром. Подобное выполнение станков-качалок обусловлено рядом причин. Так, эти станки-качалки имеют более благоприятный закон движения точки подвеса штанг, позволяющий несколько уменьшить динамические нагрузки на штанговую колонну. Если сравнить два станка-

Рисунок 1.3 - Станок - качалка с одноплечим балансиром
качалки с одинаковыми длинами и соотношениями кинематических звеньев, один из которых обычный станок-качалка, а второй - с одноплечным балансиром, то у последнего максимальные нагрузки в точке подвеса штанг будут несколько меньше (около 8-10 %, по данным К.С. Аливердизаде). Одноплечный станок-качалка имеет также более пологую кривую скорости точки подвеса штанг, позволяющую существенно (около 35 %) снизить амплитуду колебаний штанг, а следовательно, и их динамическое нагружение и тем самым увеличить срок работы штанговой колонны.
Станок – качалка с одноплечим балансиром монтируется на раме 15. Приводом станка качалки является электродвигатель 11. От него через ведущий шкив 12, при помощи ремня 16 вращение передается на ведомый шкив 17, который зафиксирован на валу редуктора 18. Натяжение ремня регулируется поворотной плиткой 13. Остановка станка – качалки производится тормозом 14. Уравновешивание станка – качалки производится на кривошипе 10, с помощью противовеса 9. Вращение электродвигателя преобразуется в возвратно-поступательное движение подвески устьевого штока 3 при помощи шатуна 2, балансира с опорой 5 и траверсы 6.
Известно, что вследствие упругих деформаций штанг и труб, после начала движения точки подвеса штанг вверх, плунжер остается неподвижным относительно цилиндра. После того как произойдет вытяжка штанг и сокращение труб, движение от ТПШ передается плунжеру, причем за это время ТПШ успевает набрать определенную скорость. В результате плунжер резко страгивается с места и нагружается столбом жидкости в трубах в виде импульса силы, т.е. возникают продольные свободные колебания системы штанговая колонна - столб жидкости. У станков-качалок с одноплечным балансиром в сравнении с обычными станками-качалками, ТПШ в момент страгивания плунжера успевает набрать меньшую скорость, что, как уже указывалось, позволяет существенно снизить амплитуду колебаний штанг и уменьшить их динамическое нагружение.
Интересно отметить, что у подобных станков-качалок направление вращения кривошипа обратное, т.е. против часовой стрелки (устье слева), что также позволяет несколько уменьшить динамические нагрузки.
Другим достоинством подобных станков-качалок является их компактность, а следовательно, и меньший вес, в результате чего их применение более предпочтительно при больших нагрузках на полированный шток.
Однако они имеют и недостатки, препятствующие их широкому распространению. Это, прежде всего, их малая боковая устойчивость, т.е. большая высота при малой ширине. У подобных станков-качалок кривошипы с грузами находятся в опасной близости от устья скважины, что затрудняет их техническое обслуживание и ремонт. При балансировке подобных станков-качалок требуется большой вес кривошипных грузов, так как вес самого кривошипа приложен к балансиру со стороны скважины по отношению к стойке балансира.