Двигатель постоянного тока
КУРСОВОЙ ПРОЕКТ
на тему: «Разработка микропроцессорного устройства управления приводом»
по дисциплине: «Микропроцессорная техника»
Выполнил: студент гр. 8-05-3(31) ф-та УК
А.А. Ковалева
Проверил: преподаватель
А.В. Богатырев
Ижевск 2010
СОДЕРЖАНИЕ
Техническое задание……………………………………………………………..3
Введение…………………………………………………………………………..4
1. Разработка структурной схемы ……………………………………………...11
2. Разработка алгоритма и программы поддержания частоты вращения……12
3. Разработка схемы электрической принципиальной………………………...14
3.1 Выбор двигателей……..………………………………………………14
3.2 Выбор микроконтроллера…………………………………………….15
3.3 Выбор микросхемы и интерфейса связи…………………………….17
3.4 Выбор датчиков……………………………………………………….19
4. Расчёт схемы электрической принципиальной …......……………………...21
4.1 Расчёт транзисторов…………………………………………………..21
4.2 Расчёт драйверов……………………………………………………...22
5. Разработка печатной платы…………………………………………….….…23
6. Разработка сборочного чертежа…………………………………..……….…24
Заключение……………………………………………………………...…….….25
Список литературы………………………………………………………………26
Приложение А. Характеристика устройств используемых в разрабатываемой схеме
Приложение Б. Схема электрическая принципиальная
Приложение В. Перечень элементов
Приложение Г. Плата печатная
Приложение Д. Сборочный чертеж
Приложение Е. Спецификация
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Разработать блок управления приводом на микроконтроллере TMS320F2808. Разработать схему электрическую принципиальную с перечнем элементов, на ее основе разработать чертеж печатной платы и сборочный чертеж. Разработать алгоритм и программу управления двигателем постоянного тока.
Исходные данные.
Микроконтроллер: TMS320F2808.
Тип датчика обратной связи: энкодер, ультразвуковой датчик.
Тип силового ключа: MOSFET – транзистор.
Органы управления: кнопка «включение».
Интерфейс связи: CAN.
ВВЕДЕНИЕ
В настоящее время электропривод представляет собой конструктивное единство электромеханического преобразователя энергии (двигателя), силового преобразователя и устройства управления. Двигатель обеспечивает преобразование электрической энергии в механическую. Разработка высокопроизводительных, компактных, экономичных систем привода является приоритетным направлением развития современной техники.
Рост степени интеграции в микропроцессорной технике и переход от микропроцессоров к микроконтроллерам с встроенным набором специализированных периферийных устройств, сделали необратимой тенденцию массовой замены аналоговых систем управления приводами на системы прямого цифрового управления. Существуют микроконтроллеры различных типов программирования: однократно программируемые и перепрограммируемые. Применение перепрограммируемых микроконтроллеров неизбежно влечет за собой изменение в системе управления. Малые размеры корпусов различного исполнения делают микроконтроллеры пригодными для портативных устройств. Низкая цена, экономичность, быстродействие, простота использования, наличие достаточного количества портов ввода/вывода способствуют применению микроконтроллеров в различных областях.
В нашей курсовой работе используются два двигателя постоянного тока и один шаговый двигатель.
Двигатель постоянного тока
Скорость вращения двигателя постоянного тока (ДПТ) можно регулировать несколькими способами:
1. Регулирование изменением магнитного потока. Этот способ находит широкое применение в электроприводах вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения двигателя и не сопровождается большими потерями мощности.
2. Регулирование с помощью резисторов в цепи якоря.Этот способ применяется при невысоких требованиях к показателям качества регулирования скорости, отличаясь в то же время универсальностью и простотой реализации.
3. Регулирование изменением напряжения якоря. Изменение частоты вращения происходит в сторону уменьшения от основной, т.к. напряжение, прикладываемое к якорю, в большинстве случаев, может изменяться тоже только вниз от номинального. Плавность регулирования определяется плавностью изменения питающего напряжения.
4. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР). Импульсное регулирование возможно как со стороны якоря, так и со стороны обмотки возбуждения главных полюсов, однако наиболее распространено импульсное якорное управление. Сущность импульсного способа состоит в том, что регулирование угловой скорости ротора достигается не за счет изменения напряжения управления, непрерывно подводимого к якорю двигателя, а путем изменения времени, в течение которого подводится номинальное напряжение.
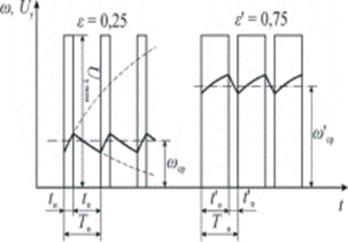
Рисунок 1 – Импульсный способ управления двигателем
Иначе говоря, при импульсном способе (рисунок 1) к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления U у.ном, в результате чего его работа состоит из чередующихся периодов разгона и торможения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то угловая скорость ротора не успевает к концу каждого периода достигать установившихся значений и установится некоторая средняя угловая скорость . Значение при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью импульсов ε (формула 1):
ε =tи/Ти, (1)
где t и - длительность импульса;
Т и - период.
С увеличением относительной продолжительности импульсов угловая скорость ротора растет (ω’ср>ωср).В период паузы tп ротор обязательно должен тормозиться. Если это условие не будет выполняться, то угловая скорость ротора при любом значении ε будет непрерывно увеличиваться, пока не достигнет значения угловой скорости х.х., так как во время импульса угловая скорость будет возрастать, а во время паузы – оставаться практически неизменной.
С ростом частоты управляющих импульсов амплитуда колебаний скорости уменьшается; среднее значение угловой скорости остается при этом неизменным.
Шаговый двигатель
Характер движения ротора шагового двигателя определяется частотой и характером изменения управляющих импульсов. В зависимости от этого различают следующие режимы работы шаговых двигателей: статический; квазистатический; установившейся; переходный. Статический режим – это режим, при котором по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле, а ротор не вращается. Под действием нагрузки ротор лишь отклоняется от положения М = 0 на некоторый угол q. Основной характеристикой этого режима является зависимость статического синхронизирующего момента от угла рассогласования M = f(q). Квазистатический режим – это режим отработки единичных шагов, при котором переходные процессы от предыдущего такта коммутации полностью затухли и скорость ротора в начале следующего шага равна нулю. Он используется в стартстопных, лентопротяжных и других механизмах, в которых требуется фиксация ротора после каждого шага. Предельная частота управляющих импульсов, при которой еще соблюдается квазистатический режим, определяется временем протекания электромагнитных и особенно электромеханических переходных процессов, т.е. временем колебаний ротора.
Для уменьшения или полного устранения качаний ротора в конце шага применяют различные приемы. При принудительном торможении после перевода управляющего импульса с первой обмотки или группы обмоток на вторую через некоторый промежуток времени, в течении которого ротор отработает часть шага и запасет определенное количество кинетической энергии, управляющий импульс вновь переводится на первую обмотку. На ротор начинает действовать тормозной момент. При правильном выборе времени и величины тормозящего момента ротор остановится в конце шага, после чего управляющий импульс переводится на вторую обмотку и ротор, отработав шаг, фиксируется в заданном положении практически без колебаний. При естественном торможении отработка шага происходит в два этапа: на первом этапе движение ротора осуществляется за счет положительного приращения момента, возникающего при сдвиге НС статора на часть полного шага; на втором этапе – за счет кинетической энергии, запасенной ротором при отрицательном (тормозном) моменте. При достижении ротором заданного положения НС сдвигается на оставшуюся часть шага и фиксирует ротор в этом положении. Естественное торможение возможно лишь в тех шаговых двигателях, у которых полный шаг можно поделить на несколько элементарных шагов.
Повысить предельную частоту квазистатического режима можно путем увеличения числа обмоток статора или числа тактов коммутации. Во всех этих случаях снижается угол перемещения и кинетическая энергия ротора, что уменьшает его склонность к качаниям. Установившийся режим – это режим, соответствующий постоянной частоте следования управляющих импульсов. При частоте управляющих импульсов f1, меньшей частоты собственны колебаний двигателя f0, движение ротора носит колебательный характер, что увеличивает динамическую ошибку при отработке заданного перемещения. При малых возмущениях частота собственных колебаний ротора где Mmax – максимальный статический синхронизирующий момент; Jp ,Jн- момент инерции ротора и нагрузки, приведенные к валу двигателя; р –число пар полюсов. При значительных возмущениях При частоте управляющих импульсов f1 = f0/k, где k – целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может привести к нарушению нормального движения ротора и выпадению его из синхронизма. При f1> f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Mн/Mmax < 0,3 - 0,5, a Jн/Jp <1 -2. Переходный режим - это основной эксплуатационный режим работы шагового двигателя. Он включает в себя пуск, реверс, торможение, переход с одной управляющей частоты на другую. Физические процессы в переходных режимах определяются как параметрами двигателя и его нагрузки, так и начальными условиями, при которых начинается переходный процесс. Основное требование к шаговому двигателю в переходных режимах заключается в отсутствии потери шага, т.е. сохранение синхронизма при любом характере изменения управляющих импульсов. Пуск шагового двигателя осуществляется из неподвижного положения ротора, которое он занимает при установившихся значениях токов в обмотках, путем скачкообразного увеличения частоты управляющих импульсов от нуля до рабочей. При этом ротор вначале отстает от поля, затем, ускорясь, достигает частоты вращения поля, опережает его и вследствие отрицательного синхронизирующего момента снова замедляет свое движение. Вследствие демпфирования колебания скорости вращения быстро затухают, наступает установившийся режим.
Максимальная частота управляющих импульсов, при которой возможен пуск без потери шага, называется частотой приемистости fпр.Частота приемистости растет с увеличением максимального синхронизирующего момента, уменьшением шага, снижением постоянной времени обмоток, нагрузки и момента инерции. Для современных ШД fпр = 100-1000 Гц. Торможение шагового двигателя осуществляется скачкообразным снижение частоты управляющих импульсов от рабочего значения до нуля. Предельная частота, при которой ротор останавливается без потери шага, как правило, выше частоты приемистости, что объясняется внутренним демпфированием – электромагнитным тормозным моментом, моментом сопротивления нагрузки и трением в опорах. Реверс шагового двигателя производится путем изменения последовательности коммутации токов в обмотках, приводящего к изменению направления вращения магнитного поля на обратное. Предельная частота управляющих импульсов, при которой реализуется реверс без потери шага, всегда меньше частоты приемистости и составляет (0,2-0,5)fпр.
Рисунок 2 – Зависимость момента от скорости шагового двигателя
Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью разгона.