Логико-лингвистическая модель происшествия в человекомашинной системе
Для количественной оценки вклада всех факторов, реально влияющих на процесс возникновения техногенных происшествий при функционировании человекомашинных систем, рассмотренные выше математические модели оказываются малопригодными. Это обусловлено не только большим числом значимых для этого свойств этих систем (см. рис. 6.4), но и трудностью их формализации вследствие нечеткой определенности соответствующих параметров. Естественно, что данная особенность заметно ограничивает применение рассмотренных до сих пор методов графо-аналитического моделирования в системном исследовании процесса возникновения техногенных происшествий.
Наиболее перспективным подходом к учету всех существенных факторов при прогнозировании техногенного риска является логиколингвистическое моделирование происшествий в человекомашинных системах, ставшее возможным благодаря появлению современных компьютеров и способов представления нечетко определенных переменных. Основными достоинствами указанного метода обычно считают высокую гибкость и целенаправленность, возможность учета сколь угодно большого числа важных факторов, оперативность оценки характера реакции системы на предполагаемое изменение отдельных свойств ее элементов или их совокупностей.
Процедура логико-лингвистического моделирования с целью прогноза вероятности возникновения происшествий и оценки вклада в них учитываемых факторов человекомашинной системы должна включать следующие основные этапы:
а) описание процесса возникновения отдельных предпосылок и их причинной цепи на качественном уровне с применением логических условий и лингвистических переменных;
б) последующую формализацию полученной при этом вербальной модели, т.е. ее представление в виде диаграммы влияния типа "сеть стохастической структуры";
в) разработку имитационного алгоритма и соответствующей ему компьютерной программы;
г) проведение с их помощью серии машинных экспериментов.
Естественно (см. параграф 6.2), что учитываемыми при этом факторами следует считать как психофизиологические свойства персонала ОТУ и структуру возложенных на него алгоритмов, так и все то, что в основном определяет эргономичность и надежность используемой им техники, комфортность рабочей среды и качество технологии работ. Именно такой системный подход применен ниже при разработке стохастической сети GERT и основанного на ней имитационного алгоритма, пригодного для машинного моделирования процесса возникновения предпосылок и перерастания их в причинную цепь техногенного происшествия. Первооснова такой сети представлена на рис. 12.2.
В верхней части изображенной полувербальной модели находятся техногенные происшествия разного типа, а ниже – предшествующие им особые ситуации и предпосылки к ним. Реализация каждого из подобных событий, обозначенных ромбиками или прямоугольниками, имеет случайный характер и может быть осуществлена различными способами. А вот основание этой модели и все остальные ее элементы образованы уже событиями и свойствами человекомашинной системы вместе с объединяющими их узлами и связями.
Заметим также, что в основу идеи, использованной при данной интерпретации процесса появления происшествий, положен учет влияния конкретных свойств человекомашинной системы на качество выполнения основных этапов операторской деятельности:
а) восприятие и дешифровка информации о ходе выполняемой технологической операции;
б) структурирование полученных данных в соответствии с решаемой им задачей;
в) выявление отклонений параметров этой системы от требований технологии работ;
г) оценка необходимости и способов вмешательства в процесс человека;
д) сравнительная оценка возможных решений и выбор из них конкурентоспособных;
е) прогнозирование степени их приемлемости и эффективности;
ж) принятие и реализация решения на корректировку процесса оператором при необходимости.
Перечисленные элементы алгоритма и процесса возникновения при этом цепи предпосылок к возможным происшествиям в человеко-машинной системе показаны на рис. 12.2 в прямоугольниках с двойной рамкой, а связи между ними – уже привычными символами (см. рис. 9.2).
Не отрицая общности рассуждений, рассмотрим процесс возникновения и развития причинной цепи техногенного происшествия при функционировании какой-либо человекомашинной системы (выполнении технологической операции одним работающим на отдельном образце соответствующего оборудования). Например, интерпретируя условия появления аварии при перевозке какого-либо АХОВ автотранспортом. При этом в качестве "машины" будет подразумеваться автомобиль, "человека" – управляющий им водитель, а "рабочей среды" – видимый ему из кабины участок дороги со средствами регулирования движения, другими неподвижными и движущимися объектами.
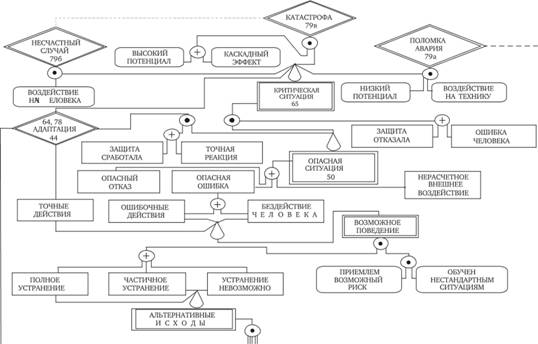
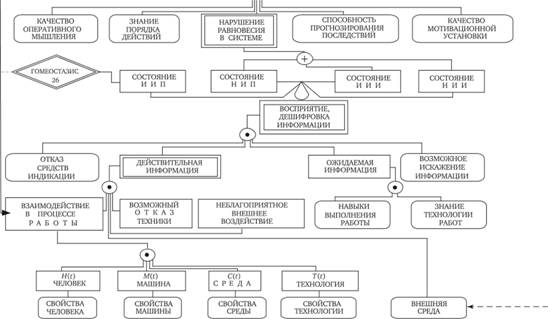
Рис. 12.2. Модель возникновения происшествия в человекомашинной системе
Описание модели проведем снизу вверх, последовательно поясняя взаимодействие элементов, расположенных на разных уровнях.
Что касается ее нижней левой части, то обратим внимание на прямоугольники, указывающие на возможные неисправности тех средств индикации состояния автомобиля и дорожных условий, которыми пользуется водитель. Данные элементы сети могут свидетельствовать, например, о возникновении несоответствия между информационной моделью водителя и реальными дорожными условиями.
В правой нижней части модели отражен тот факт, что любой человек-оператор, руководствуясь знанием технологии работ и имеющимся у него опытом, обычно создает когнитивную модель выполняемой операции, позволяющую ему после выполнения конкретных действий ожидать определенную информацию и изготовиться к следующей операции. Однако вследствие различных причин действительная информация о результате уже выполненного действия может отличаться от информации, ожидаемой человеком, что может им восприниматься или не восприниматься в последующем.
Например, при приближении к перекрестку или необходимости совершения там маневра водитель должен сбавить обороты двигателя, нажать на педаль привода сцепления или тормоза, а затем повернуть рулевое колесо. При этом он ожидает снижение шума в одном месте (от двигателя) и его появление в другом (в районе колес), а также готовится к восприятию инерционной нагрузки, обусловленной изменением вектора скорости автомобиля. Однако этого может не произойти из-за появления возможных: а) ошибок водителя (не воспринял изменение уровней шума и бокового ускорения); б) отказов задействованных при маневре элементов автомобиля (акселератора либо тормозного и рулевого устройств); в) нерасчетных воздействий дорожного покрытия (например, его низкого трения из-за оледенения или наличия масляной пленки).
Иначе говоря, в результате восприятия и дешифровки информации о состоянии рассматриваемой здесь человекомашинной системы и сравнения ее с ожидаемой возможны следующие альтернативные исходы:
а) действительная информация идентична ожидаемой и правильно воспринята водителем (см. рис. 12.2 – состояние ИИП);
б) действительная информация не идентична ожидаемой, но правильно им понята (состояние НИП);
в) действительная информация идентична ожидаемой, однако искажена водителем (состояние ИИИ);
г) действительная информация не идентична ожидаемой и искажена водителем при дешифровке или восприятии (состояние НИИ).
Указанные четыре события представляют собой полную группу исходов приема и дешифровки информации и располагаются над соответствующими стохастическими узлами сети. При этом три последних случая нужно истолковывать как появление возмущений, приведших к нарушению равновесия в человекомашинной системе, тогда как первый исход можно считать успешным (в смысле отсутствия условий для зарождения причинной цепи происшествия), т.е. там имеет место гомеостазис (событие 26). Достижение и сохранение системой динамического равновесия свидетельствует о завершении выполняемого этапа технологической операции и переходе к следующему, на что указывает логическая связь с нижними элементами модели.
Если в исследуемой человекомашинной системе нарушается равновесие, то принципиально возможны следующие три альтернативных исхода: его полное или частичное восстановление, а также невозможность своевременного устранения возмущения и предупреждения вследствие этого опасных последствий (см. соответствующие события в центральной части рис. 12.2). Например, в случае обнаружения водителем факта или тенденции к утрате системой "грузовик с АХОВ – дорога" динамического равновесия у него может возникнуть потребность в принятии решения о необходимости вмешательства в возникшую нестандартную ситуацию с целью ее корректировки.
Допустим, что после выполнения обычных (перед запрещающим знаком светофора) действий этот человек-оператор обнаружил недостаточное снижение скорости автомобиля. Далее он мог действовать, например, по одному из следующих вариантов: а) осознав недопустимость въезда на перекресток и зная о возможности торможения автомобиля стояночным тормозом, водитель попытается сбавить скорость с его помощью; б) понимая невозможность сделать это из-за скользкого покрытия или ненадежной работы стояночного тормоза, он примет решение об увеличении скорости в надежде преодолеть перекресток до въезда на него автомобилей с поперечной дороги; в) видя, что наперерез и слева по отношению к его грузовику быстро приближается легковой автомобиль, а справа, но чуть дальше, – уже грузовик, водитель не совершит каких-либо действий, растерявшись или понадеявшись на счастливый исход.
При принятии решений о порядке действий в подобных условиях человек обычно руководствуется субъективно оцененной им мерой опасности и собственными возможностями, определяемыми психофизиологическими качествами – оперативностью мышления, знанием порядка действий в сходных нестандартных ситуациях, способностью прогнозировать их последствия и уровнем мотивации. С учетом этого он выбирает "оптимальную" для него альтернативу и осуществляет наилучшие в его представлении действия, которые в действительности могут быть либо точными, либо ошибочными. Отказ от каких-либо действий вследствие замешательства или потери самообладания учтен на рис. 12.2 исходом "Бездействие человека", расположенным над соответствующим стохастическим узлом-разветвлением.
Если принятое решение и действия водителя грузовика, перевозящего АХОВ, окажутся точными, то они могут возвратить соответствующую человекомашинную систему в состояние равновесия – за счет адаптации к возникшему возмущению (событие 44). В других случаях в этой системе появится опасная ситуация, что и показано на модели событием 50. К ее возникновению могут привести также отказы других ответственных элементов автомобиля или опасные внешние воздействия на человека и технику рабочей среды.
Появившаяся в рассматриваемой системе опасная ситуация может перерасти в критическую (событие 65), т.е. привести к взаимному совмещению незащищенных объектов и зоны действия возникшей опасности, либо завершиться адаптацией к опасной ситуации (событие 64). Возможность такой адаптации будет зависеть от особенностей возникшей дорожно-транспортной ситуации: качества и взаимной совместимости конкретных компонентов данной системы и ее окружения – технических средств обеспечения безопасности дорожного движения, обученности водителей других транспортных средств и оказавшихся вблизи пешеходов точным действиям в нештатных ситуациях и т.п.
Подобно обстоит дело и с критической ситуацией. Она может завершиться либо еще одной адаптацией человекомашинной системы (событие 78), либо фактом проявления аварийности или травматизма, т.е. возникновением одного из событий, помеченных на рис. 12.2 номерами 79а, 796 и 79в. Конкретный вид происшествия (несчастный случай, катастрофа, авария или поломка) будет определяться спецификой возникшей ситуации – каков потенциал случайно возникшего опасного фактора, какие из незащищенных объектов оказались в зоне его появления, какому разрушительному воздействию они подверглись.
В частности, при низком потенциале опасного фактора и воздействии его на незащищенные элементы транспортной техники и рабочую среду возможны поломки или аварии, иногда сопровождающиеся загрязнением природной среды. При воздействии же этого фактора только на людей возможны несчастные случаи, включая их гибель. В тех случаях, когда выход из строя одних компонентов человекомашинной системы ведет к неизбежному выходу из строя других (каскадный эффект), а также при очень больших потенциалах аварийно высвободившегося энергозапаса могут возникать катастрофы.
Применительно к рассматриваемой ситуации подобные исходы могут проявиться в следующем. При малых относительной скорости и массе столкнувшихся автомобилей они сами и их водители могут отделаться лишь незначительными повреждениями. В случае же "въезда" на большой скорости легкового автомобиля в грузовик с АХОВ, внезапно оказавшийся на перекрестке, помимо неизбежных поломок могут пострадать и оба водителя.
Наконец, если в результате столкновения на большой скорости автомобилей произошла утечка, воспламенение или взрыв находящегося в одном из них АХОВ, то данное дорожно-транспортное происшествие может стать катастрофическим по причине гибели оказавшихся вблизи пешеходов и материального ущерба транспортным средствам. Возможность влияния одних техногенных происшествий на другие (эффект домино) учтена в показанной на рис. 12.2 модели пунктирной линией, идущей от верхних событий сети к нижним.
В завершение пояснения модели рис. 12.2 обратим внимание на ее соответствие современным представлениям о закономерностях появления происшествий. Свидетельства тому, например, – результаты сделанного выше (см. параграф 6.2) анализа обстоятельств их возникновения. Кроме того, рассмотренная здесь семантическая модель учитывает в качестве лингвистических переменных большое число реально действующих факторов (см. рис. 6.4), большинство из которых имеет нечетко определенную природу.
Однако построение подобных моделей представляет лишь подготовительный этап к последующему имитационному моделированию возникновения происшествий в человекомашинных системах. Необходимые для этого процедуры дальнейшей формализации модели и разработки соответствующего машинного алгоритма излагаются ниже.