Классификация кинематических пар
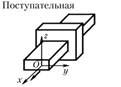
Одним из основных характерных свойств кинематических пар является количество простейших относительных движений, которых лишаются звенья механизма при соединении их в кинематические пары. Поясним это на примере. Известно, что свободное твердое тело имеет шесть степеней свободы. Произвольное перемещение его в пространстве можно представить как результат сложения шести независимых движений: трех поступательных параллельно осям координат Ox, Оу, Oz и трех вращательных вокруг осей, параллельных этим осям (рис. 1.2). В зависимости от вида соединений звеньев механизма одно из них может совершать относительно другого одно, два, три, четыре или пять движений из шести, перечисленных выше. Следовательно, кинематические пары накладывают на относительные движения звеньев определенные ограничения, которые зависят от способа их соединения. Такие ограничения называются связями. Число S связей (геометрических), ограничивающих относительные движения звеньев, определяется равенством S= 6 – IT, где W – число степеней свободы звеньев, образующих кинематическую пару.
Академиком И. И. Артоболевским введена классификация кинематических пар, согласно которой все пары де

Рис. 1.2
лятся на пять классов в зависимости от числа S. Разделение кинематических пар по классам представлено в табл. 1.1. Стрелками здесь отмечены возможные перемещения звеньев, которые сохраняются после образования пары. Для каждого класса указаны число степеней свободы W и число геометрических связей S. Приводятся условные изображения кинематических пар различных классов.
Таблица 1.1
|
Схематическое изображение кинематических пар |
Условное изображение |
S |
W |
Класс кинематической пары |
|
|
|
1 |
5 |
1 |
|
|
|
2 |
4 |
2 |
|
|
|
3 |
3 |
3 |
|
|
|
3 |
3 |
3 |
|
|
|
4 |
2 |
4 |
|
|
|
4 |
2 |
4 |
|
|
|
5 |
1 |
5 |
|
|
|
5 |
1 |
5 |
|
|
|
5 |
1 |
5 |












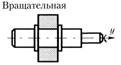


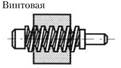

Кинематические пары разделяют на низшие и высшие, в зависимости от вида составляющих их элементов. К низшим кинематическим парам, элементами которых являются поверхности, относятся пары поступательная, вращательная, сферическая, винтовая и плоскостная (см. табл. 1.1). Точки и линии – элементы высших кинематических пар. К высшим кинематическим парам относятся пары "шар на плоскости" и "цилиндр на плоскости" (см. табл. 1.1). Преимущества низших пар – их способность передавать значительные усилия при меньшем износе в сравнении с высшими парами; для высших пар – возможность воспроизводить с их помощью достаточно сложные относительные движения.
Кинематические цепи
Кинематическая цепь – это связанная система звеньев, образующих между собой кинематические пары. Кинематические цепи можно разделить на плоские и пространственные, простые и сложные, замкнутые и незамкнутые (рис. 1.3). К простым относятся цепи, у которых каждое звено входит не более чем в две кинематические пары (рис. 1.3, а, б, г); к сложным – цепи, у которых имеются звенья, входящие в три и более кинематические пары (рис. 1.3, в); к замкнутым – цепи, у которых каждое звено входит по крайней мере в две кинематические пары (рис. 1.3, б–г), к незамкнутым – цепи, у которых есть звенья, входящие только в одну кинематическую пару (рис. 1.3, а). Все подвижные звенья плоской кинематической цепи совершают движения, параллельные одной и той же неподвижной плоскости (см. рис. 1.1). В пространственных кинематических цепях точки звеньев описывают пространственные кривые либо движутся по плоским кривым, лежащим в пересекающихся плоскостях (рис. 1.4).
Введя понятие кинематической цепи, можно дать другое определение для механизмов, составленных только из твердых тел. Механизмом называется кинематическая цепь, в которой при одном неподвижном звене (стойке) и заданном движении одного или нескольких звеньев (ведущих) все остальные звенья (ведомые) совершают однозначно определенные движения. Механизмы могут быть образованы как замкнутыми, так и незамкнутыми кинематическими цепями. Примером незамкнутой кинематической цепи может служить механизм элементарного манипулятора (рис. 1.5).
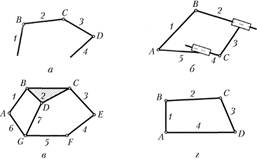
Рис. 1.3
Рис. 1.4

Рис. 1.5
Большинство механизмов образовано замкнутыми кинематическими цепями (см. рис. 1.1, 1.4).
При исследовании механизмов используются их условные изображения, составляются структурные, кинематические и другие схемы. Структурные схемы выполняются в виде чертежа, на котором с учетом условных обозначений, установленных ГОСТом, изображают звенья, кинематические пары, указывают стойку и ведущие звенья (см. рис. 1.1). Структурные схемы, выполненные в определенном масштабе, называются кинематическими схемами.