Разработка и исследование алгоритмов поведения стайных роботов для поисково-исследовательских работ
| Грант БРФФИ, №Ф10М-190 «Разработка и исследование алгоритмов поведения стайных роботов для поисково-исследовательских работ» (2010-2012 гг.). Разработчики Прокопович Г.А., Сычёв В.А. | |
Цель работы.
Целью работы является повышение эффективности и безопасности проведения поисково-исследовательских работ, сопряжённых с риском для жизни и здоровья человека, таких как разминирование, разведка, охрана и патрулирование территории Основная научная идея.
В мировой научной практике проводилось множество исследований в области моделирования группового поведения животных, однако работы велись без упора на практическое применение полученных результатов. Научная идея (гипотеза) предлагаемого проекта состоит в замене отдельных технологически сложных, а следовательно и дорогих, специальных роботов, используемых в экстремальных условиях, группой взаимодействующих малогабаритных мобильных роботов, отличающихся более простой аппаратной базой. Благодаря коллективному взаимодействию стайные роботы обладают рядом преимуществ перед одиночными и не взаимосвязанными роботами: больший радиус действия, расширенный набор выполняемых функций, более высокая вероятность выполнения поставленного задания. Решаемые задачи и их новизна.
Важными задачами предлагаемого проекта являются разработка новых, а так же доработка и внедрение имеющихся в авторском заделе методов и алгоритмов управления групповым поведением мобильных роботов. Так же важно найти способы определения надёжности и прогнозирования поведения всей стаи. Поэтому планируется решить следующие задачи:
1) определить набора необходимых функций и средств коммуникации для стайных роботов при достижении поставленных целей;
2) построить алгоритмы группового поведения роботов;
3) исследовать полученные результаты экспериментальным путём;
4) провести сравнительный анализ эффективности использования стайных роботов относительно других типов робототехнических устройств, используемых в аналогичных целях.
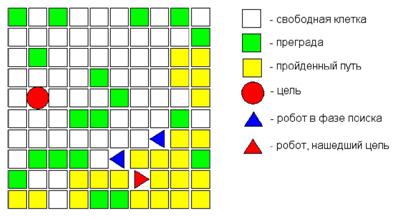 Полигон моделирования поисковой группы роботов Полигон моделирования поисковой группы роботов  Блок-схема устройства акустической коммуникации
Основные результаты.
В процессе выполнения проекта были предложены алгоритмы управления группами мобильных роботов, предназначенных для поиска заданных объектов в неизвестной местности и записи различных параметров окружающей среды. Были разработаны алгоритмы централизованного и децентрализованного управления группами роботов, а так же способ коммуникации в среде роботов. Компьютерное моделирование полученных алгоритмов проводилось в среде Матлаб. Изучена зависимость эффективности применения группы роботов при централизованном и стайном типах управления. Блок-схема устройства акустической коммуникации
Основные результаты.
В процессе выполнения проекта были предложены алгоритмы управления группами мобильных роботов, предназначенных для поиска заданных объектов в неизвестной местности и записи различных параметров окружающей среды. Были разработаны алгоритмы централизованного и децентрализованного управления группами роботов, а так же способ коммуникации в среде роботов. Компьютерное моделирование полученных алгоритмов проводилось в среде Матлаб. Изучена зависимость эффективности применения группы роботов при централизованном и стайном типах управления.
|