
Категории:
АстрономияБиология
География
Другие языки
Интернет
Информатика
История
Культура
Литература
Логика
Математика
Медицина
Механика
Охрана труда
Педагогика
Политика
Право
Психология
Религия
Риторика
Социология
Спорт
Строительство
Технология
Транспорт
Физика
Философия
Финансы
Химия
Экология
Экономика
Электроника
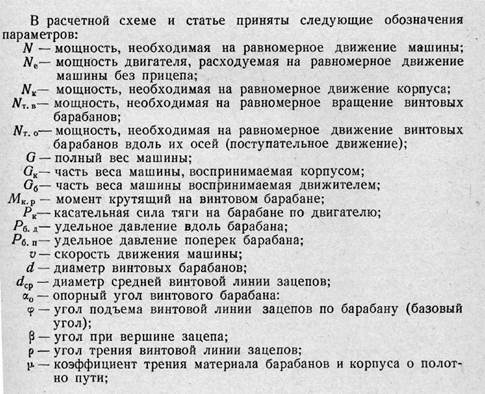
ДВИГАТЕЛЯ ДЛЯ СНЕГОБОЛОТОХОДОВ С ВИНТОВЫМИ ДВИЖИТЕЛЯМИ
О ПРИБЛИЖЕННОМ РАСЧЕТЕ ПОТРЕБНОЙ МОЩНОСТИ
Одним из видов движителей для снегоболотоходных машин могут быть винтовые движители [2, 4].
Начало создания транспортных средств с винтовыми движителями относится к XIX веку. Несмотря на раннее изобретение этого типа движителя, он не получил достаточного распространения в связи с широким применением более универсального гусеничного движителя. Последнее время интерес к винтоходным машинам значительно возрос [5, 6, 7]. Так, в США по заказу военно-морского Министерства фирма „Крайслер" спроектировала и изготовила опытные образцы винтоходов-амфибий под названием „March Screw", а в Англии проводились некоторые теоретические и экспериментальные исследования винтоходных машин [5].
Интерес к машинам с винтовыми движителями объясняется их высокой проходимостью по таким болотным топям, где проходимость других машин-амфибий затруднена.
Создание винтоходных машин происходило на основе решения чисто инженерных задач, без значительных научных исследований. Имеющиеся исследования относятся, главным образом, к винтовым движителям, работающим в воде.
Наиболее широкие исследования винтовых движителей для движения по суше и воде проводились в Бирмингемском университете В. N. Cole [5]. Исследования проводились на макетных масштабных образцах с целью определения тяговых качеств винтовых движителей амфибий в воде и на песке различной влажности в зависимости от их параметров. Эти исследования показали, что тягово-сцепные качества винтоходных машин во много превосходят тягово-сцепные качества однотипных гусеничных машин.
Настоящая статья является первой попыткой теоретического исследования затрат мощности на равномерное движение снегоболото-хода с винтовым движителем и частью работы, проводимой автором в отраслевой научно-исследовательской лаборатории снегоходных машин под руководством канд. техн. наук С. В. Рукавишникова.
Рассматривая работу винтового движителя на снежном полотне пути, исходим из следующих основных допущений, комплексно характеризующих взаимодействие винтового движителя со средой:
1. Работа цилиндрической части движителя аналогична работе абсолютно жесткого вала в подшипнике скольжения, работающего в режиме винтовой (червячной) передачи.
2. Работа винтовой линии зацепов (гребней) по своей кинематике
и действию сил аналогична работе червяка, червячной передачи.
3. Рассматривая работу винтового движителя при особо малых
удельных давлениях—0,02—0,05 kFjcm%, пренебрегаем работой дефор
мации полотна пути, и все физико-механические свойства последнего
оцениваем основным параметром для этого типа движителя—коэффи
циентом трения.
4. Распределение давления винтового барабана на полотно пути
принято равномерным по его длине.
5. Распределение давления винтового барабана на полотно пути
в поперечном сечении принято по косинусоидному закону [7].
На рис. 1. показана расчетная схема машины с действующими силами.
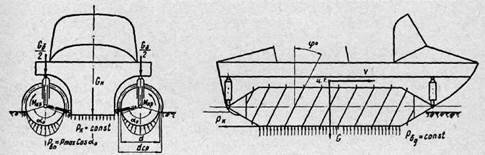
Рис. 1. Схема сил, действующих на винтоходную машину
|
На рис. 1. показана расчетная схема машины с действующими силами.

|

Величину касательной силы тяги по двигателю можно определить как величину осевой силы на червяке червячной передачи [3]:

Из этой зависимости видим, что основной параметр транспортной машины — величина касательной силы тяги — при неизменном Мкр и

|
dcp, значительно увеличивается при уменьшении угла подъема винтовой линии зацепов и уменьшается с увеличением коэффициента трения материала зацепа о полотно пути (рис. 2).
Из графика на рис. 2 видно, что величина касательной силы тяги в большей степени зависит от угла подъема, чем от коэффициента трения материала. Величина ^силы тяги пропорциональна котангенсу угла подъема винтовой линии зацепов.
Наряду с получением основного параметра — силы тяги, важнейшее значение в транспортной машине имеет коэффициент полезного действия движителя. Из теории червячных передач известно, что к. п. д. червячной передачи, подобие которой представляет винтовой движитель, меняется в широких пределах в зависимости от ее параметров. При ведущем червяке к. п. д. движителя можно определить по следующей зависимости [3]:

|
Таким образом, увеличение касательной силы тяги за счет уменьшения угла подъема винтовой линии снижает к. п. д. винтового движителя. Для получения наибольшего к. п. д. движителя и необ-
ходимой силы тяги угол подъема винтовой линии зацепов необходимо подбирать в зависимости от полотна пути, а точнее в зависимости от коэффициента трения материала зацепа о полотно пути.
Наряду с к. п. д. винтовой линией зацепов при ведущем барабане, важное значение при движении винтоходной машины на буксире или при накате имеет к. п. д. винтовой линии зацепов при ведомом барабане. В отличие от первого назовем его „обратным", а величину его можно взять по аналогии с червячной передачей [3].

|
Анализируя прямой и обратный к. п. д. (рис. 3), можно наметить зону a, b, e, f наивыгоднейшей работы винтовой линии зацепов, а

|
следовательно, и винтовых барабанов. Граница е—/ определяет максимальные значения к. п. д. прямого хода, граница а ~ Ъ определяет достаточно устойчивые и высокие к. п. д., за которой он значительно быстрее снижается. Граница Ь — е, отмеченная по к. п. д., равному 50%, является нижним условием обратимости винтовых барабанов.
Таким образом, можно заключить, что оптимальные углы винтовой линии зацепов лежат в пределах 25-i-35o для всех возможных рациональных грунтов, по которым может двигаться винто-ходная машина, а при движении по снегам, имеющим малый коэффициент трения, возможно увеличение его до 42°. К. п. д. винтовой линии при этом может иметь значение до 0,8.
Особенностью винтового движителя является реализация силы тяги только за счет зацепных качеств
винтовых барабанов [1,4], поэтому движение винтоходной машины можно осуществить одним из трех следующих способов:
1) винтовые барабаны могут воспринимать полный вес машины;
2) винтовые барабаны могут воспринимать часть веса машины;
3) винтовые барабаны могут быть почти совсем разгружены от
действия на них веса машины.
В связи с такими возможными способами передвижения винтоходной машины будут и различные затраты мощности на движение ее. Затраты мощности на передвижение состоят в основном из трех слагаемых: затраты мощности на вращение винтовых барабанов, за-
траты мощности на осевое перемещение барабанов и затраты мощности на перемещение корпуса.
Затраты мощности на вращение винтовых барабанов можно по аналогии с подшипником скольжения определить по следующей зависимости [3].


|
| или при выражении ее через поступательную скорость машины: |

|
В частном, наиболее тяжелом случае нагружения барабана величина центрального опорного угла может быть равна тт. Тогда мощность, затрачиваемая на вращение винтового барабана, будет равна:
При всех других величинах центрального опорного угла величина мощности, идущей на вращение барабанов, будет меньше данной величины.
Затраты мощности на осевое перемещение винтовых барабанов будут зависеть от нагрузки, приходящейся на барабан, скорости его перемещения и коэффициента сопротивления движению барабана, и получат выражение:

Величина /с суммарного коэффициента сопротивления движению барабана выражает трение барабана в цилиндрическом желобе полотна пути. Максимальная величина /с—— р при центральном опорном
угле барабана <хо= тт.
При движении винтоходной машины на днище корпуса или лыжах последние будут также затрачивать мощность на преодоление сопротивления движению, которую можно определить по выражению

Таким образом, полная мощность, затрачиваемая на равномерное движение машины, без учета потерь на винтовой линии зацепов и к. п. д. трансмиссий, выразится:

Выражение 1.27  /tg /tg  характеризует потери на вращение винтовых барабанов, поэтому его можно назвать коэффициентом сопротивления вращению барабанов. Он увеличивается пропорционально коэффициенту трения, котангенсу угла подъема и центральному углу винтового барабана. В большей степени он зависит от угла подъема винтовой линии зацепов характеризует потери на вращение винтовых барабанов, поэтому его можно назвать коэффициентом сопротивления вращению барабанов. Он увеличивается пропорционально коэффициенту трения, котангенсу угла подъема и центральному углу винтового барабана. В большей степени он зависит от угла подъема винтовой линии зацепов
|

|

|
Эта зависимость уже может быть использована в практических ориентировочных расчетах.
Анализируя затраты мощности на равномерное движение винтоходной машины, можно заметить, что основные затраты ее идут на вращение винтовых барабанов. Величина этих затрат в основном зависит от веса машины, приходящегося на винтовые барабаны. Особенно это заметно при малых углах подъема винтовой линии зацепов в то время как сцепной вес машины не оказывает влияния на увеличение реализации касательной силы тяги винтоходной машины [1, 4, 5].
Для оценки точности выведенной расчетной зависимости проведен расчет по ней нескольких выполненных конструкций,результат которого сведен в таблицу

|
1. Основными сопротивлениями винтоходной машины является
сила трения. Выбор материала для трущихся поверхностей имеет
первостепенное значение.
2. Величина угла подъема винтовой линии зацепов (базового уг
ла) представляет один из основных параметров винтоходной машины,
определяющих качественные показатели ее. Для каждого вида по
лотна пути и назначения машины она должна выбираться вполне оп
ределенной. Для более полного использования мощности двигателя
машины на ней необходимо иметь сменные винтовые барабаны. При
пользовании одними барабанами оптимальные базовые углы нужно
выбирать в пределах 25-4-35°.
3. Для уменьшения вредных сопротивлений движению винтовые
барабаны должны воспринимать минимальный сцепной вес машины,
необходимый для внедрения зацепов в полотно пути.
4. Экономичность движения винтоходной машины обратно про
порциональна сцепному весу машины.
5. Для изменения сцепного веса на машине необходимо иметь
устройство, позволяющее плавно менять дорожный просвет машины.
ЛИТЕРАТУРА
1. Беккер М. Г. Теория передвижения по суше, ч. 1и2. Автозавод им. Ли
хачева, 1956.
2. Крживицкий А. А. Снегоходные машины. Машгиз, 1949.
3. Кол чин Н. И. Теория механизмов и машин. Судпромгиз, 1963.
4. В е к к е г М. G. Machanics of Locomotionand Lunar Surface Vehicle Consepts—
SAE Preprints s. a 1965, № 632.
5. С о 1 e B. N. Inquiry into ampnibions screw traction—Pros. Inrtn. Mech. Engrs,
1961, № 175.
6. «Automob Topics», 1963, 63, № 7, Chrysler Corporation making unique new
vechicle.
7. Gordon I. V. New amphibious Vechicl programs—Navae Engrs J, 1963, № 3.