Кинематическое исследование механизма
Петрозаводский государственный университет
Физико-технический факультет
Курсовая работа
Дисциплина: Прикладная механика.
Тема: Кинематический анализ механизма.
Работу выполнил
Студент 21209 группы Кашин С.С
Работу принял
Преподаватель Михалёв В.Р.
Петрозаводск 2011
Контрольная работа №1
Кинематическое исследование механизма.
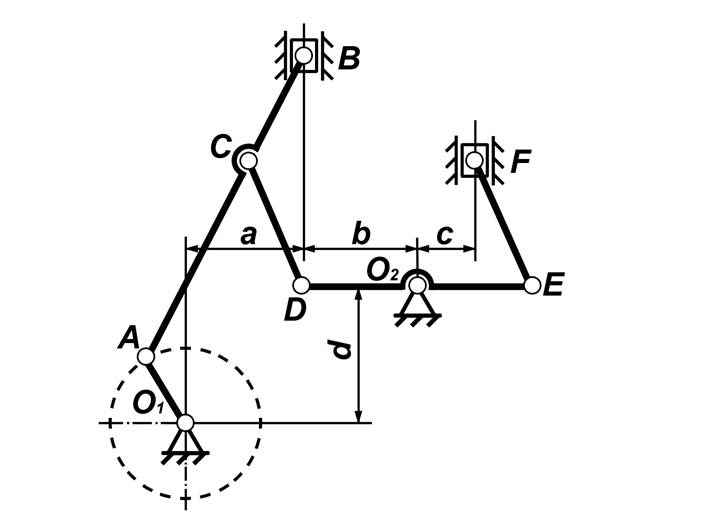
Дано: a=0,19 м; b=0,19 м; c=0,10 м; d=0,22 м; О1А=0,12 м; О2D= 0,19 м; АВ=0,55 м; ВС=0,19 см; СD=0,23 м; DЕ=0,38 м; EF=0,22 м.
1. Придерживаясь установленного порядка кинематического исследования механизма, выбираю масштаб l.
Здесь О1А= 0,12 изображаю это звено на плане положений отрезком  =24 мм.
=24 мм.
l=О1А/ =0,12/24=0,005 м/мм
Используя зависимость l= l/  , определяю длины остальных звеньев механизма на плане положений
, определяю длины остальных звеньев механизма на плане положений

| Звено | l (м) | (мм)
|
| a | 0,19 | |
| b | 0,19 | |
| с | 0,10 | |
| O1A | 0,12 | |
| O2D | 0,19 | |
| AB | 0,55 | |
| BC | 0,19 | |
| CD | 0,23 | |
| DE | 0,38 | |
| EF | 0,22 |
2. В принятом масштабе l= 0,005 м/мм по известным размерам a, b и c получаю неподвижные точки О1, О2 и направляющие ползунов B и F. Провожу траектории точек A, D и E. Траектория точки A – окружность радиуса O1A, траектории точек E и D – дуги соответствующих радиусов O2E и O2D, причём O2E = O2D.
За начальное (нулевое) положение механизма и всех его звеньев принимаю положение, при котором кривошип O1A и шатун AB будут лежать на одной линии . Для этого нужно из точки О1 , радиусом равным (О1А+АВ), сделать засечку на направляющей ползуна В, полученную точку В0 соединяю прямой О1В0. На пересечении траектории точки A с О1В0 получаю точку А0. Из точки B0 радиусом BC делаю засечку на прямой A0В0- это и будет точка С0.
Для определения положения точки D0 из точки C0 делаю засечку радиусом CD на траектории точки D. Полученную точку D0 соединяю прямыми O2D0 и C0D0.
Для нахождения точки E0 продолжаю прямую O2D0 до пересечения с траекторией точки E. Полученную точку E0 соединяю прямой O2E0.
Для определения точки F0 из точки E0 делаю засечку радиусом EF на направляющей ползуна F, полученную точку F0 соединяю прямой E0F0.
Разделив траекторию точки A на шесть равных частей, аналогичным методом нашёл остальные положения всех точек звеньев механизма.
3. Построение плана скоростей покажу для второго положения.
4.
4.1. Угловая скорость кривошипа ОА: wО1А=3 рад/с, направлена против часовой стрелки
4.2. Скорость точки A кривошипа uА=wО1А*|O1A|=3*0,12=0,36 м/с
4.3. Принимаю масштаб скоростей
u= 
Здесь  - отрезок на плане скоростей в мм, изображающий скорость точки А.
- отрезок на плане скоростей в мм, изображающий скорость точки А.
Вектор скорости точки A направлен перпендикулярно О1А в сторону wО1А. Из произвольной точки “P1”плана скоростей откладываем этот вектор  =P1a=72 мм, перпендикулярный O1A2.
=P1a=72 мм, перпендикулярный O1A2.
4.4. Точка B принадлежит шатуну АВ, который совершает плоскопараллельное движение, принимая за полюс точку A скорость точки B можно определить по формуле 
 - скорость точки B относительно точки A, этот вектор направлен перпендикулярно AB в сторону wАВ.
- скорость точки B относительно точки A, этот вектор направлен перпендикулярно AB в сторону wАВ.
uBA=wAB*|AB|
wAB – угловая скорость шатуна AB, пока это неизвестная величина, т.е. определить точное значение скорости uBA пока не можем, но вектор направлен перпендикулярно AB. На плане скоростей через точку “a”провожу линию, перпендикулярную A2B2.
Так как точка B принадлежит ещё и ползуну, который совершает поступательное движение вдоль вертикальной направляющей, то скорость точки B должна быть направлена вдоль этой направляющей. На плане скоростей через точку “Р1” провожу вертикальную прямую (направление скорости точки B), получаю точку пересечения “b”, которая определяет два вектора в масштабе скоростей.
=ab=25 мм
 =Р1b=56 мм
=Р1b=56 мм
Определяю действительные величины этих скоростей
uВА= *u=24*0,005=0,12 м/с
uВ= *u= 56*0,005=0,28 м/с
Определяю угловую скорость шатуна АВ
wAB=uВA/|AB|=0,12/0,55=0,22 рад/с
4.5. Определяю скорость точки C. Точка C принадлежит шатуну AB. Т.к. точка принадлежит шатуну AB, то она совершает плоскопараллельное движение, принимая за полюс точку A можно записать:
 = +
= + 
- Скорость точки C относительно точки A
Зная значение угловой скорости wAB можно вычислить uCA
uCA=wAB*|AC|=0,22*0,36=0,08 м/с
=uCA/u= 0,08/0,005=16 мм
На плане скоростей из точки “a” откладываю вектор длиной 16 мм перпендикулярно A2B2 в сторону wAB
Соединяю конец полученного вектора с точкой “P1”, получаю ещё один вектор, который определяет скорость точки C.
=P1c=61 мм
Определяем действительное значение скорости точки C
uC = * u=61*0,005=0,31 м/с
4.6. Определяем скорость точки D. Точка D принадлежит шатуну CD, который совершает плоскопараллельное движение, принимая за полюс точку C скорость точки D можно определить по формуле 
 - скорость точки D относительно точки C, этот вектор направлен перпендикулярно CD в сторону wCD.
- скорость точки D относительно точки C, этот вектор направлен перпендикулярно CD в сторону wCD.
uDC=wCD*|CD|
wCD – угловая скорость шатуна CD, пока это неизвестная величина, т.е. определить точное значение скорости uDC пока не можем, но вектор направлен перпендикулярно CD. На плане скоростей через точку “c”провожу линию, перпендикулярную C2D2.
С другой стороны точка D принадлежит коромыслу DE, которое вращается вокруг неподвижной точки O2. Скорость точки D должна быть направлена перпендикулярно этому коромыслу. На плане скоростей через точку “Р1” провожу линию, перпендикулярную O2D2, получаем точку пересечения “d”, которая определяет два вектора в масштабе скоростей.
=cd=32 мм
 =P1d=50 мм
=P1d=50 мм
Определяю действительные величины этих скоростей
uDC= *u=32*0,005=0,16 м/с
uD= *u= 50*0,005=0,25 м/с
Определяю угловую скорость шатуна CD
wCD=uDC/|CD|=0,16/0,23=0,7 рад/с
Определяю угловую скорость коромысла DE
wDE=uD/|O2D|=0,25/0,19=1,32 рад/с
4.7. Определяю скорость точки E. Точка E принадлежит коромыслу DE, которое вращается вокруг неподвижной точки O2. Скорость точки E должна быть направлена перпендикулярно этому коромыслу. Скорость точки E численно равна скорости точки D, но направлена в противоположную сторону. На плане скоростей от точки P1 откладываю вектор P1e в противоположную вектору P1d сторону, но равной длины.
Вектор Pe определяет скорость точки E:
 =P1e=50 мм
=P1e=50 мм
Определяем действительное значение скорости точки E
uE = * u=50*0,05=0,25 м/с
4.8. Точка F принадлежит шатуну EF, который совершает плоскопараллельное движение, принимая за полюс точку E скорость точки F можно определить по формуле 
 - скорость точки F относительно точки E, этот вектор направлен перпендикулярно EF в сторону wEF.
- скорость точки F относительно точки E, этот вектор направлен перпендикулярно EF в сторону wEF.
uFE=wEF*|EF|
wEF – угловая скорость шатуна EF, пока это неизвестная величина, т.е. определить точное значение скорости uFE пока не можем, но вектор направлен перпендикулярно EF. На плане скоростей через точку “e”провожу линию, перпендикулярную E2F2.
Так как точка F принадлежит ещё и ползуну, который совершает поступательное движение вдоль вертикальной направляющей, то скорость точки F должна быть направлена вдоль этой направляющей. На плане скоростей через точку “Р1” провожу вертикальную прямую (направление скорости точки F), получаю точку пересечения “f”, которая определяет два вектора в масштабе скоростей.
=ef=32 мм
 =P1f=46 мм
=P1f=46 мм
Определяю действительные величины этих скоростей
uFE= *u=32*0,005=0,16 м/с
uF= *u= 46*0,005=0,23 м/с
Определяю угловую скорость шатуна EF
wEF=uFE/|EF|=0,16/0,22=0,73 рад/с
5. Построение плана ускорений для второго положения механизма.
5.1. Определяю ускорение точки А. Эта точка принадлежит кривошипу О1А, который вращается вокруг неподвижной точки О1. Ускорение точки A можно определить по формуле 
 - нормальное ускорение точки A, определяется по формуле
- нормальное ускорение точки A, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки (в данном случае от точки А2 к точке О1)
 - касательное ускорение точки A, определяю по формуле
- касательное ускорение точки A, определяю по формуле 
 , т.к. wО1А=const, то
, т.к. wО1А=const, то  и
и 
Таким образом 
Назначаю масштаб плана ускорений 
 - длина отрезка (мм) которым на плане ускорений изображаю ускорение точки A, принимаю
- длина отрезка (мм) которым на плане ускорений изображаю ускорение точки A, принимаю 

Из произвольной точки “1”откладываю отрезок длиной 154 мм, параллельный О1А2 по направлению от точки А2 к точке О1.
1a=  =154 мм
=154 мм
5.2. Определяю ускорение точки В.
С одной стороны точка B принадлежит шатуну АВ, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку A) можно записать 
 - нормальное ускорение точки B относительно точки A
- нормальное ускорение точки B относительно точки A

Этот вектор направлен из точки В2 к точке А2

На плане ускорений от точки “a” откладываю отрезок длиной 4 мм параллельный В2А2.
1a= =4 мм
 - касательное ускорение точки B относительно точки А.
- касательное ускорение точки B относительно точки А.

 -угловое ускорение шатуна AB – неизвестная величина, поэтому пока величину найти не можем, но этот вектор направлен перпендикулярно AB в сторону . На плане ускорений через точку “1” провожу линию перпендикулярную A2B2.
-угловое ускорение шатуна AB – неизвестная величина, поэтому пока величину найти не можем, но этот вектор направлен перпендикулярно AB в сторону . На плане ускорений через точку “1” провожу линию перпендикулярную A2B2.
С другой стороны точка F принадлежит ползуну, который совершает поступательное движение вдоль вертикальной направляющей (траектория точки F – прямая линия, параллельная направляющей), тогда ускорение точки направлено вдоль этой направляющей.
На плане ускорений через точку “1” провожу линию, параллельную вертикальной направляющей, получаю точку пересечения “f”, которая определяет два вектора в масштабе ускорений
 1b=175 мм
1b=175 мм
 =1b=136 мм
=1b=136 мм
Определяю действительные величины этих ускорений


Определяю угловое ускорение шатуна AB

5.3. Определяю ускорение точки C. Эта точка принадлежит шатуну АВ, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку А) можно записать 
 - нормальное ускорение точки C относительно точки A
- нормальное ускорение точки C относительно точки A

Этот вектор направлен из точки C4 к точке A4

На плане ускорений от точки “a” откладываю отрезок длиной 3 мм параллельный А2B2.
2a= =3 мм
 - касательное ускорение точки C относительно точки A.
- касательное ускорение точки C относительно точки A.

- угловое ускорение шатуна AB, вектор направлен перпендикулярно A2B2 в сторону .

На плане ускорений от точки “2” откладываю отрезок длиной 115 мм, перпендикулярный А2B2.
2c= 
Вектор 1c определяет в масштабе ускорение точки C: 1с=  =116 мм
=116 мм

5.4. Определяю ускорение точки D.
С одной стороны точка D принадлежит шатуну CD, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку C) можно записать 
 - нормальное ускорение точки D относительно точки C
- нормальное ускорение точки D относительно точки C

Этот вектор направлен от точки D2 к точке C2

На плане ускорений от точки “c” откладываю отрезок длиной 16 мм параллельный C2D2.
3c= =16 мм
 - касательное ускорение точки D относительно точки C.
- касательное ускорение точки D относительно точки C.

 - угловое ускорение шатуна CD – неизвестная величина, поэтому пока величину найти не можем, но этот вектор направлен перпендикулярно CD в сторону . На плане ускорений через точку “3” провожу линию перпендикулярную C2D2.
- угловое ускорение шатуна CD – неизвестная величина, поэтому пока величину найти не можем, но этот вектор направлен перпендикулярно CD в сторону . На плане ускорений через точку “3” провожу линию перпендикулярную C2D2.
С другой стороны точка D принадлежит коромыслу DE, которое вращается вокруг неподвижной точки О2. Ускорение точки D можно определить по формуле 
 - нормальное ускорение точки D, определяется по формуле
- нормальное ускорение точки D, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки (в данном случае от точки D2 к точке О2)

На плане ускорений от точки “1” откладываю отрезок длиной 47 мм, параллельный D2E2.
4=  =47 мм
=47 мм
 - касательное ускорение точки D, определяю по формуле
- касательное ускорение точки D, определяю по формуле 
 - угловое ускорение коромысла DE – неизвестная величина, поэтому пока величину
- угловое ускорение коромысла DE – неизвестная величина, поэтому пока величину  найти не можем, но этот вектор направлен перпендикулярно DE в сторону . На плане ускорений через точку “4” провожу линию, перпендикулярную D2E2.
найти не можем, но этот вектор направлен перпендикулярно DE в сторону . На плане ускорений через точку “4” провожу линию, перпендикулярную D2E2.
Получаем точку пересечения “d”, которая определяет три вектора в масштабе ускорений
1d=  =77 мм
=77 мм
4d= =62 мм
3d= =57 мм
Определяю действительные величины этих ускорений



Определяю угловое ускорение шатуна DC и коромысла DE


5.5. Определяю ускорение точки E. Точка E принадлежит коромыслу DE, которое вращается вокруг неподвижной точки О2. Ускорение точки E можно определить по формуле 
 - нормальное ускорение точки E, определяется по формуле
- нормальное ускорение точки E, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки (в данном случае от точки E2 к точке О2)

На плане ускорений от точки “1” откладываю отрезок длиной 47 мм, параллельный D2E2.
5=  =47 мм
=47 мм
 - касательное ускорение точки E, определяю по формуле:
- касательное ускорение точки E, определяю по формуле:

 - угловое ускорение коромысла DE, вектор
- угловое ускорение коромысла DE, вектор  направлен перпендикулярно D2E2 в сторону .
направлен перпендикулярно D2E2 в сторону .

Вектор 1е определяет в масштабе ускорение точки E: 1е=  =77 мм
=77 мм

5.6. Определяю ускорение точки F.
С одной стороны точка F принадлежит шатуну EF, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку E) можно записать 
 - нормальное ускорение точки F относительно точки E
- нормальное ускорение точки F относительно точки E

Этот вектор направлен из точки F2 к точке E2

На плане ускорений от точки “e” откладываю отрезок длиной 17 мм параллельный E2F2.
6e=  =17 мм
=17 мм
 касательное ускорение точки F относительно точки E.
касательное ускорение точки F относительно точки E.

 -угловое ускорение шатуна EF – пока неизвестная величина, поэтому величину найти не можем, но этот вектор направлен перпендикулярно EF в сторону . На плане ускорений через точку “6” провожу линию, перпендикулярную E2F2
-угловое ускорение шатуна EF – пока неизвестная величина, поэтому величину найти не можем, но этот вектор направлен перпендикулярно EF в сторону . На плане ускорений через точку “6” провожу линию, перпендикулярную E2F2
С другой стороны точка F принадлежит ползуну, который совершает поступательное движение вдоль вертикальной направляющей (траектория точки F – прямая линия, параллельная направляющей), тогда ускорение точки направлено вдоль этой направляющей.
На плане ускорений через точку “1” провожу линию, параллельную вертикальной направляющей, получаю точку пересечения “f”, которая определяет два вектора в масштабе ускорений
 6f=17 мм
6f=17 мм
 =1f=99 мм
=1f=99 мм
Определяю действительные величины этих ускорений


Определяю угловое ускорение шатуна EF

На этом кинематический анализ механизма для второго положения закончен. Мы при помощи графоаналитического метода определили скорости всех точек механизма, угловые скорости всех его звеньев, ускорения всех точек механизма и угловые ускорения всех его звеньев.
Контрольная работа №2.
Рассчитать основные параметры цилиндрической зубчатой передачи и построить геометрическую картину эвольвентного зацепления двух зубчатых колёс по исходным данным, приведённым в таблице.
Принять, что зубчатые колеса нарезаны без смещения режущего инструмента, угол зацепления равен 20
Дано:
Число зубьев шестерни z1=17
Число зубьев колеса z2=18
Модуль зацепления m=16 мм
Решение.
1.Определяю основные размеры передачи:
Межосевое расстояние: aw=m(z1+z2)/2=16*(17+18)/2=280 мм
Делительные диаметры шестерни колеса: d1=mz1= 16*17= 272 мм
d2=mz2= 16*18= 288 мм
Диаметры выступов шестерни колеса: da1=m(z1+2)=16*(17+2)=304 мм
da2=m(z2+2)=16*(18+2)=320 мм
Диаметры впадин шестерни колеса: df1=m(z1-2,5)=16*(17-2,5)=232 мм
df2=m(z2-2,5)=16*(18-2,5)=248 мм
Шаг зацепления: p= m= 3,14*16= 50,24 мм
2.На формате А4 в масштабе 1:1 или l=  =1м/1000мм=0,001м/мм намечаю линию центров О1О2, О1О2=280 мм.
=1м/1000мм=0,001м/мм намечаю линию центров О1О2, О1О2=280 мм.
Из центра О2 провожу три окружности, диаметры которых d2, da2, df2. Получаю будущую точку зацепления П - точка пересечения окружности диаметром d2 и линии центров О1О2.
Из точки П по дуге делительной окружности (диаметр её d2) выполняю вправо три засечки циркулем размером р/2, а влево от точки П- две засечки размером р/2. Первый размер р/2 правее точки П делю на две равные части и через эту середину провожу будущую осевую первого зуба колеса.
Аналогично поступаю с третьим размером р/2 (правее точки П) и провожу осевую второго зуба колеса.
Второй размер р/2 левее точки П также делю пополам и провожу осевую третьего зуба колеса.
3. Эвольвенту окружности заменяю дугой окружности, радиус которой R определяю следующим образом: ножку зуба колеса делю на две равные части и через эту середину из центра О2 провожу вспомогательную окружность радиусом «r» - получаю точку О3. Размер О1П и есть искомый радиус R. Этим радиусом на трёх дугах окружностей d2, da2, df2 профили трёх зубьев колеса. Скругления на ножках зубьев выполняю произвольным радиусом, но не более 5 мм.
4. Из центра О1 провожу три окружности, диаметры которых d1,da1,df1.
По дуге делительной окружности ( диаметр её d1) выполняю вправо от точки П две засечки размером р/2, а влево от точки П- одну засечку размером р/2. Второй размер р/2 справа от точки П и левый размер р/2 делю пополам и из центра О1 провожу осевые будущих зубьев шестерни. Профили зубьев очерчиваю аналогично профилям зубьев колеса, проведя через середину ножки зуба шестерни вспомогательную окружность радиуса «r».