Приклади системи автоматичного керування
Найпростіша, однак не вичерпна відповідь на це питання може бути сформульована у такий спосіб: сутністю або метою автоматичного керування є підтримка постійного (або точніше необхідного) значення регульованої змінної величини незалежно від усякого роду впливів або «збурювання», яким може піддаватися керований об'єкт і звідки б ці збурювання не виходили. Загалом кажучи, у техніці можуть застосовуватися різні засоби й методи для підтримки сталості значення регульованої величини. Можна, наприклад, додати об'єкту таку характеристику, щоб з появою збурювання, тобто якого-небудь впливу, що порушує сталий стан об'єкта, його характеристика приводила б регульовану величину до необхідного колишнього значення. Такий спосіб використовується, наприклад, у стабілізаторах напруги або струму.
Можна усувати вплив збурювання й іншим способом, а саме, створюючи за допомогою деякого додаткового пристрою протидію збурюванню, тобто зустрічно йому спрямований ефект. Для приклада уявимо собі приміщення, у якому повинна підтримуватися певна температура. Саме по собі, тобто без усяких додаткових пристроїв, це приміщення повинне мати температуру, що встановлюється з відомим відставанням – залежно від зовнішньої температури. Цьому можна перешкодити, управляючи опаленням приміщення залежно від зовнішньої температури; це означає, що кожному значенню зовнішньої температури буде відповідати певну кількість тепла, що повинне подаватися в приміщення для збереження постійної його температури незалежно від коливань зовнішньої температури. Можна встановити такий чисто автоматичний зв'язок, при якому термометр, що вимірює температуру зовнішнього повітря, буде впливати в зазначеному змісті на інтенсивність горіння в топленні й котельної нагрівальної системи. Однак на цьому «автоматизм» буде кінчатися. Температура усередині самого приміщення тут не впливає сама по собі на інтенсивність опалення. Така система реагує тільки на коливання температури зовнішнього повітря, але не реагує на інші можливі джерела порушення температури приміщення, тобто на такі «збурювання», як: 1) поява вітру тієї або іншої сили й напрямку;
2) стан вентиляційної заслінки (відкрита або закрите); 3) якість (теплотворна здатність) палива котельні й т.п. Якщо, здійснити (у принципі це можливо) додаткові впливу від кожного із цих збурювань на джерело тепла, то це зажадає значних витрат, не говорячи вже про чисто технічні труднощі через переплетення окремих систем впливу різної природи й з різними характеристиками. Розглянута тут система являє собою відкриту, або незамкнуту, ланцюг її впливів не є системою автоматичного керування.
Під «автоматичним керуванням» у нашім прикладі розуміється пристрій, що виходить тільки з підлягаючого збереження температури приміщення як «регульованої величини» і управляє перестановкою клапана опалювальної системи при змінах (відхиленнях) температури приміщення винятково на основі безперервного її виміру. Перестановка клапана повинна здійснюватися в такому змісті, щоб при кожній зміні температури приміщення відбувалося відновлення її колишнього заданого значення. Тому, що зміна значення температури знову впливає на розглянутий пристрій і
т. ін. Отже, ми маємо справу з «замкнутим контуром впливів», у якому беззупинно циркулює деякий вплив рис. 1.2.
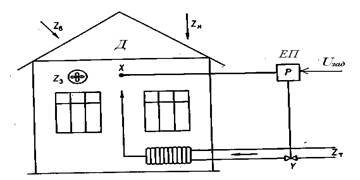
Рис. 1.2 – Приклад замкнутого контуру регулювання:
X – регульована величина «температура приміщення»; В – регулюючий вплив (вентиль опалення); Р – регулятор (утримуючий і орган, що задає температуру);
Z – збурення «зовнішня температура»; ZB - збурення «вітер»;
Z3 – збурення «вентиляційна заслінка»; ZГ – збурення «стан джерела тепла»
З рис.1.2 видно, що на тепловий стан приміщення усередині будинку впливають наступні збурювання: zн – зовнішня температура, zB – вітер,
z3 – відкриття вентиляційної заслінки, zт – теплова інтенсивність джерела тепла, що може також піддаватися коливанням. У деякій точці приміщення виміряється фактичне значення X - регульованої величини, наприклад, за допомогою контактного термометра. Часто результат такого виміру в системі регулювання повинен перетворюватися в інший вид енергії – у механічне зусилля, в електричну напругу й т.п.
Обмірюване й перетворене значення порівнюється в регуляторі R із запропонованим (заданим) значенням регульованої величини. Це задане значення визначає в нашім випадку ту температуру, на яку повинне здійснюватися автоматичне керування; задане значення, мабуть, повинне допускати різні уставки, щоб можна було пристосовуватися до різних умов, наприклад, в одних випадках може знадобитися більше висока температура приміщення, в інші - більше низька. Результатом порівняння фактичного й заданого значень, тобто їхня різниця, буде те, що називається відхиленням регульованої величини (іноді користуються термінами «помилка» або «неузгодженість») від її запропонованого значення. Відхилення діє на керуючий орган, що здійснює вплив на опалювальну систему. Цей вплив називається керуючим впливом Y і може мати різне значення. Вентиль опалювальної системи є входом регульованої установки або об'єкта керування, а місце виміру температури X – її виходом. Таким чином, до складу об'єкта керування в цьому випадку входять: опалювальна установка, радіатор, повітряний простір у приміщенні й зовнішні стіни, що більш-менш інтенсивно віддають тепло назовні.
З іншого боку, можна вважати, що місце виміру X є одночасно входом для регулятора, а вентиль – його виходом. Регулятор складається з окремих частин, що визначають його функціональні властивості. Вид і конструктивное, оформлення визначається призначенням, тобто областю застосування регулятора.
Об'єкт керування може складатися з декількох частин. У нашому прикладі такими частинами є: вентиль, джерело теплової енергії, система трубопроводів, радіатор, повітряний простір, стіни. Всі складові частини регулятора й об'єкта регулювання, називані регулювальними ланками, визначають у сукупності поводження системи керування.
Підрозділ системи керування на «об'єкт керування» і «регулятор» і саме протиставлення цих понять є трохи умовними й навіть довільними.
У деяких випадках керуючий орган вимагає для оперування з ним (тобто для його перестановки) певної витрати енергії. Тоді доводиться вводити в систему додаткову ланку, що доставляє енергію від деякого джерела й що служить для перестановки керуючого органа згідно команді, отриманої від регулятора. Цю додаткову ланку відносять в одних випадках до регулятора, в інших - до самого об'єкта керування, дивлячись по тому, як це обумовлено. Протиставлення «об'єкта керування» і «регулятора» як двох окремих частин установки (або системи керування) іноді буває корисним; тоді й на схемах їх представляють у вигляді двох окремих блоків. В інших випадках систему керування зручніше досліджувати, поєднуючи об'єкт керування й регулятор в один загальний блок.
У системи автоматичного керування існують фізичні границі дії. Регулятор не в змозі задовольнити всім умовам і у всякому разі тим умовам, які не були передбачені в його розрахунку. У розглянутому прикладі опалювальної установки одна границя дії регулятора наступає при досягненні вентилем опалення свого граничного положення. При зовнішній температурі в + 30°С не можна одержати усередині приміщення +20°С. Інша границя дії регулятора може бути обумовлена, наприклад, тим, що при зовнішній температурі в –50°С не вистачить теплової енергії в джерела тепла, або якщо при достатній кількості тепла вийде з ладу яка-небудь інша частина опалювальної установки.
Діапазон дії системи керування й кожного її складеного елемента повинен відповідати її розрахунковим завданням, інакше, як ми бачили, регулювальні властивості порушаться. На обраному прикладі це добре видно. Потрібно сказати, що по своїй істоті приклад з опалювальною установкою є далеко не найпростішим, тому що в ньому мають місце складні процеси переходу тепла від радіатора в приміщення, із приміщення назовні, причому все це пов'язане з інерційністю опалювальної системи й самого приміщення (будинку).
Надалі для стислості систему автоматичного регулювання будемо позначати САР.
Основне завдання системи автоматичного керування в даному випадку може бути сформульовано в такий спосіб: при даній команді, що може бути деякою функцією часу, потрібно управляти деякою фізичною величиною так, щоб вона була близька до значення командної функції. Регульованою фізичною величиною можуть бути: струм, напруга, потужність
(в електричній системі), положення, швидкість, прискорення (у механічній системі), тиск, температура, кількість подаваного газу або рідини
(в гідравлічній і пневматичній системах) і т.д. (табл. 1.l і табл. 1.2).
Таблиця 1.1
| Основні регульовані величини і їхні розмірності | Одиниця виміру |
| Машинобудування | |
| Натискання, тиск | кг/мм2 |
| Крутний момент | кг/м |
| Швидкість обертання | оберт/хв |
| Хід, рівень, положення | м, градус |
| Швидкість переміщення | м/сек |
| Електротехника | |
| Активна й реактивна потужність | Вт, вар |
| Частота | Гц |
| Хімія | |
| Витрата речовини, рідини, | кг/сек |
| газу | кг/сек, м3/година |
| Відношення речовин у суміші | |
| Концентрація іонів | сименс/см |
| Електрична провідність рідини | % |
| Теплотворна здатність . | ккал/кг, ккал/м3 |
Таблиця 2
Вимірювані й регульовані величини у системах автоматичного регулювання у різних областях техніки
| Електричні величини | |
| Напруга постійного струму | Активна потужність |
| Постійний струм | Реактивна потужність |
| Напруга змінного струму | Частота |
| Змінний струм активний | Інтеграл частоти (в електричних годинниках) |
| Змінний струм реактивний | Опір |
| Змінний струм повний | Фазовий кут (також коефіцієнт потужності) |
| Провідність та інше | |
| Неелектричні величини | |
| Температура | Сила звука |
| Число про/хв | Розтягання |
| Вологість | Швидкість (лінійна) |
| Сила світла | Кутове положення |
| Тиск (механічний) | Довжина шляху (переміщення) |
| Кількість рідини, що протікає у газу, сек | Сила, зусилля |
| Натяг | Час (тривалість) |
| Товщина | Теплопродуктивність |
| Кількість | Щільність (суміші) |
| Співвідношення кількостей |
Система автоматичного керування складається в основному із пристрою виміру регульованої величини на виході з'єднаного зворотним зв'язком із приладом, що вимірює помилку або відхилення; підсилювача для посилення сигналу помилки й джерела енергії для виконання команди. Загалом, система автоматичного керування може бути визначена як чутлива до помилки, що відтворює й підсилює пристрій між входом (командою або завданням) і виходом (виконанням, або відпрацьовуванням, або реакцією).
Сформульований вище спосіб дії САК є до відомого ступеня ідеалізованим. У практичних умовах все-таки існує деяка розбіжність за часом або по величині або по обох цих факторах між керованою змінною й керуючим сигналом через запізнювання реакції внаслідок неминучих інерції й тертя у фізичних ланках системи, які можуть накопичувати енергію. Наявність у системі зворотних зв'язків і підсилювача, які можуть мати свої інерції, приводить іноді до запізнювання або несвоєчасної дії коригувального сигналу. Цей сигнал із зазначеної причини може діяти «невлад», тобто замість ослаблення первісної команди, підсилювати її, так що вона стає усе більше й більше й починає «розгойдувати» систему. Це породжує одну з найважливіших проблем при створенні САР - проблему стійкості.
Нарешті, є ще один практичний фактор, що може відхиляти поводження САК від описаного вище ідеалізованого виконання нею своїх функцій - перешкоди або небажані сигнали, які можуть утримуватися в команді, тобто в самому командному сигналі, і несприятливо впливати на процес керування.
Наведена тут коротка характеристика состава й принципу дії САР відбиває й основний зміст теорії автоматичного регулювання.