Механизм мышечного сокращения
Скелетная мышца представляет собой сложную систему, преобразующую химическую энергию в механическую работу и тепло. В настоящее время хорошо исследованы молекулярные механизмы этого преобразования.
Структурная организация мышечного волокна. Мышечное волокно является многоядерной структурой, окруженной мембраной и содержащей специализированный сократительный аппарат — миофибриллы. Кроме этого, важнейшими компонентами мышечного волокна являются митохондрии, системы продольных трубочек — саркоплазматическая сеть (ретикулум) и система поперечных трубочек — Т-система. Функциональной единицей сократительного аппарата мышечной клетки является саркомер (рис. 2.20,А); из саркомеров состоит миофибрилла. Саркомеры отделяются друг от друга Z-пластинками. Саркомеры в миофибрилле расположены последовательно, поэтому сокращение саркомеров вызывает сокращение миофибриллы и общее укорочение мышечного волокна.
Изучение структуры мышечных волокон в световом микроскопе позволило выявить их поперечную исчерченность. Электронно-микроскопические исследования показали, что поперечная исчерченность обусловлена особой организацией сократительных белков миофибрилл — актина (молекулярная масса 42 000) и миозина (молекулярная масса около 500 000). Актиновые филаменты представлены двойной нитью, закрученной в двойнуюспираль с шагом около 36,5 нм. Эти филаменты длиной 1 мкм и диаметром 6—8 нм, количество которых достигает около 2000, одним концом прикреплены к Z-пластинке. В продольных бороздках актиновой спирали располагаются нитевидные молекулы белка тропомиозина. С шагом, равным 40 нм, к молекуле тропомиозина прикреплена молекула другого белка — тропонина. Тропонин и тропомиозин играют важную роль в механизмах взаимодействия актина и миозина. В середине саркомера между нитями актина располагаются толстые нити миозина длиной около 1,6 мкм. В поляризационном микроскопе эта область видна в виде полоски темного цвета (вследствие двойного лучепреломления) — анизотропный А-диск. В центре его видна более светлая полоска Н. В ней в состоянии покоя нет актиновых нитей. По обе стороны А-диска видны светлые изотропные полоски — I-диски, образованные нитями актина. В состоянии покоя нити актина и миозина незначительно перекрывают друг друга таким образом, что общая длина саркомера составляет около 2,5 мкм. При электронной микроскопии в центре Н-полоски обнаружена М-ли-ния — структура, которая удерживает нити миозина. На поперечном срезе мышечного волокна можно увидеть гексагональную организацию миофиламента: каждая нить миозина окружена шестью нитями актина (рис. 2.20, Б).
При электронной микроскопии видно, что на боковых сторонах миозиновой нити обнаруживаются выступы, получившие название поперечных мостиков. Они ориентированы по отношению к оси миозиновой нити под углом 120°. Согласно современным представлениям, поперечный мостик состоит из головки и шейки. Головка приобретает выраженную АТФазную активность при связывании с актином. Шейка обладает эластическими свойствами и представляет собой шарнирное соединение, поэтому головка поперечного мостика может поворачиваться вокруг своей оси.
Использование микроэлектродной техники в сочетании с интерференционной микроскопией позволило установить, что нанесение электрического раздражения на область Z-пластинки приводит к сокращению саркомера, при этом размер зоны диска А не изменяется, а величина полосок Н и I уменьшается. Эти наблюдения свидетельствовали о том, что длина миозиновых нитей не изменяется. Аналогичные результаты были получены при растяжении мышцы — собственная длина актиновых и миозиновых нитей не изменялась. В результате этих экспериментов выяснилось, что изменялась область взаимного перекрытия актиновых и миозиновых нитей. Эти факты позволили Н. Huxley и A. Huxley предложить независимо друг от друга теорию скольжения нитей для объяснения механизма мышечного сокращения. Согласно этой теории, при сокращении происходит уменьшение размера саркомера вследствие активного перемещения тонких актиновых нитей относительно толстых миозиновых. В настоящее время выяснены многие детали этого механизма и теория получила экспериментальное подтверждение.
Механизм мышечного сокращения. В процессе сокращения мышечного волокна в нем происходят следующие преобразования:
А. Электрохимическое преобразование:
1. Генерация ПД.
2. Распространение ПД по Т-системе.
3. Электрическая стимуляция зоны контакта Т-системы и саркоплазматического ретикулума, активация ферментов, образование инозитолтрифосфата, повышение внутриклеточной концентрации ионов Са2+.
Б. Хемомеханическое преобразование:
4. Взаимодействие ионов Са2+ с тропонином, освобождение активных центров на актиновых филаментах.
5. Взаимодействие миозиновой головки с актином, вращение головки и развитие эластической тяги.
6. Скольжение нитей актина и миозина относительно друг друга, уменьшение размера саркомера, развитие напряжения или укорочение мышечного волокна.
Передача возбуждения с двигательного мотонейрона на мышечное волокно происходит с помощью медиатора ацетилхолина (АХ). Взаимодействие АХ с холинорецептором концевой пластинки приводит к активации АХ-чувствительных каналов и появлению потенциала концевой пластинки, который может достигать 60 мВ. При этом область концевой пластинки становится источником раздражающего тока для мембраны мышечного волокна и на участках клеточной мембраны, прилегающих к концевой пластинке, возникает ПД, который распространяется в обе стороны со скоростью примерно 3—5 м/с при температуре 36 oС. Таким образом, генерация ПД является первым этапом мышечного сокращения.
Вторым этапом является распространение ПД внутрь мышечного волокна по поперечной системе трубочек, которая служит связующим звеном между поверхностной мембраной и сократительным аппаратом мышечного волокна. Т-система тесно контактирует с терминальными цистернами саркоплазматической сети двух соседних саркомеров. Электрическая стимуляция места контакта приводит к активации ферментов, расположенных в месте контакта и образованию инозитолтрифосфата. Инозитолтрифосфат активирует кальциевые каналы мембран терминальных цистерн, что приводит к выходу ионов Са2+ из цистерн и повышению внутриклеточной концентрации Са2+ с 107до 105 M. Совокупность процессов, приводящих к повышению внутриклеточной концентрации Са2+ составляет сущность третьего этапа мышечного сокращения. Таким образом, на первых этапах происходит преобразование электрического сигнала ПД в химический — повышение внутриклеточной концентрации Са2+, т. е. электрохимическое преобразование.
При повышении внутриклеточной концентрации ионов Са2+ тропомиозин смещается в желобок между нитями актина, при этом на актиновых нитях открываются участки, с которыми могут взаимодействовать поперечные мостики миозина. Это смещение тропомиозина обусловлено изменением конформации молекулы белка тропонина при связывании Са2+ . Следовательно, участие ионов Са2+ в механизме взаимодействия актина и миозина опосредовано через тропонин и тропомиозин.
Существенная роль кальция в механизме мышечного сокращения была доказана в опытах с применением белка экворина, который при взаимодействии с кальцием излучает свет. После инъекции экворина мышечное волокно подвергали электрической стимуляции и одновременно измеряли мышечное напряжение в изометрическом режиме и люминесценцию экворина. Обе кривые полностью коррелировали друг с другом (рис. 2.21). Таким образом, четвертым этапом электромеханического сопряжения является взаимодействие кальция с тропонином.
Следующим, пятым, этапом электромеханического сопряжения является присоединение головки поперечного мостика к актиновому филаменту к первому из нескольких последовательно расположенных стабильных центров. При этом миозиновая головка поворачивается вокруг своей оси, поскольку имеет несколько активных центров, которые последовательно взаимодействуют с соответствующими центрами на актиновом филаменте. Вращение головки приводит к увеличению упругой эластической тяги шейки поперечного мостика и увеличению напряжения. В каждый конкретный момент в процессе развития сокращения одна часть головок поперечных мостиков находится в соединении с актиновым филаментом, другая свободна, т. е. существует последовательность их взаимодействия с актиновым филаментом. Это обеспечивает плавность процесса сокращения. На четвертом и пятом этапах происходит хемомеханическое преобразование.
Последовательная реакция соединения и разъединения головок поперечных мостиков с актиновым филаментом приводит к скольжению тонких и толстых нитей относительно друг друга и уменьшению размеров саркомера и общей длины мышцы, что является шестым этапом. Совокупность описанных процессов составляет сущность теории скольжения нитей
Первоначально полагали, что ионы Са2+ служат кофактором АТФазной активности миозина. Дальнейшие исследования опровергли это предположение. У покоящейся мышцы актин и миозин практически не обладают АТФазной активностью. Присоединение головки миозина к актину приводит к тому, что головка приобретает АТФазную активность.
Гидролиз АТФ в АТФазном центре головки миозина сопровождается изменением конформации последней и переводом ее в новое, высокоэнергетическое состояние. Повторное присоединение миозиновой головки к новому центру на актиновом филаменте вновь приводит к вращению головки, которое обеспечивается запасенной в ней энергией. В каждом цикле соединения и разъединения головки миозина с актином расщепляется одна молекула АТФ на каждый мостик. Быстрота вращения определяется скоростью расщепления АТФ. Очевидно, что быстрые фазические волокна потребляют значительно больше АТФ в единицу времени и сохраняют меньше химической энергии во время тонической нагрузки, чем медленные волокна. Таким образом, в процессе хемомеханического преобразования АТФ обеспечивает разъединение головки миозина и актинового филамента и энергетику для дальнейшего взаимодействия головки миозина с другим участком актинового филамента. Эти реакции возможны при концентрации кальция выше 106М.
Описанные механизмы укорочения мышечного волокна позволяют предположить, что для расслабления в первую очередь необходимо понижение концентрации ионов Са2+. Экспериментально было доказано, что саркоплазматическая сеть имеет специальный механизм — кальциевый насос, который активно возвращает кальций в цистерны. Активация кальциевого насоса осуществляется неорганическим фосфатом, который образуется при гидролизе АТФ, а энергообеспечение работы кальциевого насоса также за счет энергии, образующейся при гидролизе АТФ. Таким образом, АТФ является вторым важнейшим фактором, абсолютно необходимым для процесса расслабления. Некоторое время после смерти мышцы остаются мягкими вследствие прекращения тонического влияния мотонейронов (см. главу 4). Затем концентрация АТФ снижается ниже критического уровня и возможность разъединения головки миозина с актиновым филаментом исчезает. Возникает явление трупного окоченения с выраженной ригидностью скелетных мышц.
2.Механизмы управления движением
Взаимодействие человека и животных с окружающей средой может осуществляться только через движение. Мы можем выполнять самые разнообразные движения — от ходьбы и бега до таких тончайших двигательных актов, как сложные манипуляции пальцев у пианиста, различные жесты, а также письмо, речь, мимика, с помощью которых мы можем передавать различные оттенки мыслей и чувств.
Существует два вида двигательных функций: поддержание положения тела (позы) и собственно движения. В естественных условиях отделить их друг от друга невозможно, так как движение без одновременного удержания определенной позы также невозможно, как и удержание позы без движения.
Среди собственно движений следует различать элементарные движения и действия. Последние представляют собой совокупность элементарных движений, объединенных единой целью в некоторую функциональную систему. Каждое конкретное действие включено в состав поведенческого акта. Оно является шагом к удовлетворению той потребности, которая вызвала данное поведение, и решает свою промежуточную задачу.
В управлении движением различают стратегию и тактику. Основу стратегии движения определяет конкретная мотивация (биологическая, социальная и др.). Именно на ее основе определяется цель поведения, т. е. то, что должно быть достигнуто. В структуре поведенческого акта цель закодирована в акцепторе результатов действия. В отношении движения это выглядит как формирование двигательной задачи, т. е. того, что следует делать.
Под тактикой понимают конкретный план движений, т. е. то, как будет достигнута цель поведения, с помощью каких двигательных ресурсов, способов действия. В структуре поведенческого акта тактическое планирование движения непосредственно представлено в блоке программ. При построении программы движения учитывается множество факторов, как общая стратегия, так и пространственно-временные характеристики среды, сигнальная значимость ее стимулов, прошлый жизненный опыт.
Выделение исследователями стратегии и тактики как двух аспектов управления движением естественно ставит вопрос о том, каким образом стратегия реализуется в тактике движения, или, иными словами, как осуществляется трансформация мотивации в движение и с помощью каких физиологических механизмов это происходит. Но прежде чем мы обратимся к этой теме, рассмотрим два основных физиологических механизма управления всеми движениями человека и животных.
Принято считать, что регуляция поведения биологических систем, включая регуляцию движений, строится на двух основных принципах —принципе сенсорных коррекций текущего движения по цепи обратной связи и принципе прямого программного управления. Последний особенно важен для тех случаев, когда имеются быстрые изменения в системе и это ограничивает возможность сенсорных коррекций.
Исследователи накопили множество экспериментальных фактов, подтверждающих реальное существование двух механизмов управления движением: посредством центральных моторных программ и с помощьюобратной афферентации, которая используется для непрерывного контроля и коррекции выполняемого движения. Для многих видов движения управление может осуществляться одновременно двумя механизмами при разном их соотношении для движений, различающихся сложностью и уровнем организации.
На принципиальную роль обратной афферентации в регуляции движения и поведения в целом указывали Н.А. Бернштейн [5] и П.К. Анохин [1]. Сенсорные раздражения не только могут запускать движение, но и выполнять корректирующую функцию. Обратная афферентация, сигнализирующая о результатах действия, сопоставляется с программой движений и служит уточнению координат цели и траектории движения.
Значение афферентных систем для контроля за мотонейронами спинного мозга впервые было показано английским физиологом Ч. Шеррингтоном. Он указал на существование сенсорных обратных связей, которые регулируют активность мотонейрона. Им введен термин «проприоцепция» для обозначения сенсорных входов, которые возбуждаются во время движения. Ч. Шеррингтон считал, что главная функция пропри-оцепторов — давать информацию о собственных движениях организма. Выделено два типа проприоцепторов: рецепторов растяжения, активирующихся при растяжении мышц, и рецепторов напряжения, которые чувствительны к силе сокращения мышцы.
На основе опытов с условными рефлексами И.П. Павлов устанавливает, что моторная кора получает сенсорные проекции от рецепторов мышечной и суставной чувствительности. В 1909 г. он вводит понятие двигательного анализатора, выполняющего функцию восприятия сигналов от тела. Позже понятие двигательного анализатора было расширено, дополнительно в него были включены сенсорные и ассоциативные зоны коры, которые проецируются на моторную кору. В результате сама моторная кора стала рассматриваться как центральный аппарат построения движения.
Принципиальная невозможность реализации, особенно произвольного движения, с помощью одних только эфферентных импульсов была показана Н. А. Бернштейном. Он писал, что «двигательный эффект центрального импульса не может быть предрешен в центре, а решается целиком на периферии... решающую роль для осуществления управления движением должна играть афферентация» [5, с. 214]. Согласно Н. А. Бернштейну, изменения в мышце, возникающие при движении, возбуждают чувствительные окончания проприоцепторов, а эти проприоцептивные сигналы, достигая моторных центров, вносят изменения в эффекторный поток, т. е. в физиологическое состояние мышцы. Таким образом, перед нами не рефлекторная дуга, а другая форма взаимоотношений между афферентным эффекторным процессом, характерная для всех координационных процессов — рефлекторное кольцо» [5, с. 91]. Рефлекторное кольцо представляет собой фундаментальную форму протекания двигательного нервного процесса.
Значение афферентации для осуществления движения становится очевидным при некоторых неврологических нарушениях, которые получили название «апраксий». Под ними понимаются нарушения произвольных движений и действий, совершаемых с предметами. Прикинестетической апраксий нарушается проприоцептивная кинестетическая афферентация. Патология возникает в задних отделах корковаго ядра двигательного анализатора (1, 2 и частично в 4-м полях). У такого больного движения становятся недифференцированными, плохо управляемыми, страдает письмо. При этом остается сохранной внешняя пространственная организация движения. Дефекты движения, возникающие из-за нарушений проприоцептивной афферентации, частично могут быть скомпенсированы за счет усиления зрительного контроля. Припространственной апраксии поражение захватывает теменно-затылочные отделы коры на границе 19 и 39 полей. Это приводит к нарушению зрительно-пространственной афферентации движений. Больные не могут выполнять пространственно-ориентированных движений (застелить постель, одеться). Усиление зрительного контроля не улучшает выполнение произвольных движений в пространстве.
Первые представления о том, что движения могут управляться не только по типу непрерывной коррекции, но и через механизм центральных моторных программ, также возникли на основе работ Ч. Шеррингтона. Занимаясь изучением функций мотонейронов спинного мозга у собак при осуществлении некоторых рефлекторных двигательных актов, таких, как чесание и ходьба, он установил, что сигналы, идущие от многих различных областей головного мозга, часто сходятся к одним и тем же мотонейронам спинного мозга. Ч. Шеррингтон охарактеризовал эти мотонейроны как «общий конечный путь», который связывает головной мозг с мышечным актом. Производя перерезки спинного мозга, он показал, что механизмы, ответственные за некоторые двигательные акты, локализованы в спинном мозге. Через несколько месяцев после такой перерезки у собаки удавалось вызвать чееательный рефлекс на механические раздражения — щекотание кожи или подтягивание за воло^ сок шерсти в области спины. При этом движения осуществлялись без видимого нарушения направления и ритма. Работа Ч.Шеррингтона по чесательно-му рефлексу заложила основу для развития современной концепции о «запускаемом движении» с помощью центральной программы, с участием спинального генератора двигательного ритма [51].
Позже было показано, что ходьба животного — перемещение в окружающей среде при помощи координированных движений конечностей—также запрограммирована на уровне спинного мозга. Болевое раздражение одной из конечностей у спинального животного вызывает рефлекторные движения всех четырех лап. Если такое животное поместить в тредбан, то при некоторых условиях оно может совершать шагательные координированные движения. Для каждой конечности существует свой локомоторный центр. Им является генератор ритмической активности. Его ритмическая импульсация ведет к ритмическому чередованию активности флексоров и экстензеров нескольких суставов одной конечности. Согласованная деятельность генераторов разных конечностей обеспечивается про-приоспинальными системами и связями в пределах отдельных сегментов спинного мозга
У человека, по-видимому, также имеются спинальные генераторы локомоции. Их активность можно обнаружить у новорожденного при прикосновении к коже в форме шагательного рефлекса. Однако у взрослого человека эти генераторы находятся под сильным контролем высших центров, которые подавляют их самостоятельную активность. Выявлены не только спинальные двигательные программы, но и программы супраспинального уровня.
Программы цепных двигательных актов широко представлены в различных структурах мозга. Центральная нервная система хранит центральные программы как врожденных, так и выработанных действий. Так, например, дыхательные, глотательные и другие движения управляются врожденными моторными программами. Тогда как различные спортивные, профессиональные навыки (акробатические упражнения,
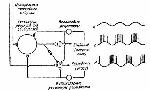
Рис. 39. Генератор локомоторного ритма у таракана; слева — схема нейронной сети, обеспечивающей движение одной ноги, справа — характерная электрическая активность интернейрона, генерирующего ритм (И), и мотонейронов сгибателей (С) и разгибателей (Р). Генератор состоит из группы постоянно осциллирующих безимпульсных нейронов, которые задают ритм мотонейронам сгибателей и одновременно через тормозные интернейроны (черные) затормаживают разгибатели. Центральные командные нейроны тонически возбуждают нейроны генератора и мотонейроны разгибателей. Рецепторы флексоров и экстензеров дают начало обратным связям, которые корректируют локомоцию (по К.Пирсону, 1976) печатание на машинке и др.) осуществляются по программам, формирующимся в течение жизни индивида. При определенном опыте человека эти движения выполняются почти автоматически, в результате чего обратная афферентация, в том числе от проприоцепдии, перестает играть существенную роль. Обратная афферентация становится нужной лишь при переделке, изменении навыка. Механизм программного управления используется не только для врожденных двигательных актов и двигательных навыков, но и для осуществления произвольных и быстрых баллистических движений, например некоторых движений в спорте, требующих большой скорости. Такие движения производятся настолько быстро и точно, что использовать обратные сенсорные связи для их управления нецелесообразно.
У позвоночных центральные программы запускаются управляющими центрами, а у беспозвоночных, как правило, командными нейронами,впервые выделенными в 1968 г. К. Вирсма с сотрудниками. Сигнал от командного нейрона или управляющего центра играет чисто пусковую роль. Он не несет информации о том, как построить соответствующее движение. Структура движения заложена во взаимосвязях мотонейронов, с которыми он связан.
Нейрофизиологи установили, что рефлекс бегства рака, легко вызываемый тактильным, вибрационным раздражением или звуком, реализуется через возбуждение одного гигантского командного нейрона, связанного с тремя мотонейронами. У рыб оборонительный рефлекс можно вызвать звуковым и вибрационным раздражением. В ответ на эту стимуляцию рыба уплывает, совершая быстрые и повторяющиеся движения головой и хвостом. Этот сложный двигательный акт запускается парой командных нейронов — гигантских маутнеровских клеток, расположенных в продолговатом мозгу. Вся реакция запускается одним единственным спайком, на 1-2 мс опережающим движение.
Смысл сигнала, поступающего от командного нейрона, может быть модифицирован через дополнительный афферентный вход. У таракана найден командный нейрон, который запускает бег насекомого, если его лапы касаются опоры. Если же лапы находятся в воздухе, то раздражение того же командного нейрона вызывает не бег, а полет. Т. е. командный нейрон посылает достаточно абстрактную команду «включаю локомоцию», конкретный смысл которой придает обстановка. При раздражении командного нейрона с различной силой в ряде случаев можно управлять параметрами центральной программы, например изменять скорость локомоции, амплитуду чесания и т. д.
Существует два типа командных нейронов. Одни из них лишь запускают ту или другую двигательную программу, но не участвуют в ее дальнейшем осуществлении. Это нейроны—тригеры. Примером такого нейрона является маутнеровская клетка рыбы. Командные нейроны другого типа получили название воротных нейронов. Они поддерживают или видоизменяют какую-то двигательную программу, лишь будучи постоянно возбужденными. Такие нейроны обычно управляют позными или ритмическими движениями. В качестве примера можно привести интернейрон генератора локомоторного ритма у таракана.
До недавнего времени мало что было известно о процессах формирования и построения новых моторных программ. Однако благодаря изучению нейронной активности коры больших полушарий и других структур мозга у высших животных, а также клиническим данным, полученным на человеке, сложилось мнение, что ведущая роль в построении новых моторных программ принадлежит передним отделам коры больших полушарий (премоторной, префронтальной коре). Анализ нарушений двигательных функций у больных показал, что поражение мозга в премоторной области сопровождается нарушением организации движения во времени, т. е. распадом последовательности движений. У таких больных страдает и выработка двигательных навыков. Поражение же в префронтальной коре может привести вообще к распаду произвольной регуляции движений. Этот дефект особенно выражен, когда требуется менять программы движений и действий.
Исследователи предполагают, что именно в передних отделах коры строятся новые моторные программы. Для этого используется весь видовой и индивидуальный опыт человека и животных. При этом, по-видимому, происходит выбор отдельных фрагментов из имеющихся программ как врожденных форм поведения, так и приобретенных двигательных автоматизмов для их последующей интеграции в новую моторную программу.
Роль передних отделов коры больших полушарий в программировании движения изучалась А.С. Батуевым. Опыты проводились на обезьянах, у которых формировались пищевые инструментальные отсроченные реакции. Животное находилось в приматологическом кресле; в его мозг, в различные структуры были введены микроэлектроды, через которые регистрировалась активность отдельных нейронов.
Перед обезьяной располагалась центральная лампа-вспышка для подачи предупреждающего сигнала том, что опыт начался. Слева и справа от нее помещалось по лампе, которые включались как условные сигналы. Ниже находился экран, закрывавший два рычага, размещенных под левой и правой лампами соответственно. У животных вырабатывалась дифференцировка: при зажигании левой лампы обезьяна должна выбрать левый рычаг, при зажигании правой — правый рычаг. За правильный выбор следовало пищевое подкрепление. Опыт проходил в следующей последовательности. Сначала вспыхивала центральная лампа-вспышка, затем подавался условный сигнал — включалась на 2—5 с одна из двух ламп (слева или справа). После выключения условного сигнала следовал период отсрочки длительностью 5-20 с, только после которого отодвигался экран и обезьяна получала доступ к рычагам.
Было обнаружено три группы нейронов, последовательно вовлекаемых в процесс осуществления условнорефлекторного двигательного навыка. Все три популяции нейронов были зарегистрированы в теменной, и особенно в лобной коре.
Первая группа клеток реагировала только на условный сигнал и при этом по-разному на зажигание лампы слева и справа, т.е. эти нейроны реагировали на пространственные свойства условного раздражителя. Они были отнесены авторами к сенсорным нейронам с пространственной селективностью. Вторая группа нейронов изменяла свою активность только в период отсрочки, также по-разному реагируя на условный сигнал слева и справа. Третья группа нейронов, также обнаружив свойство пространственной селективности, реагировала только после открытия экрана, т. е. в пусковой период программы.
Исследователи предполагают, что сенсорные нейроны (первая группа) передают информацию второй группе нейронов, принадлежащей кратковременной памяти, которые возбуждаются в течение всего периода отсрочки, сохраняя тем самым полученную информацию. Третья группа нейронов — нейроны моторных программ. Вероятно, они получают информацию от нейронов памяти и запускают хорошо отработанную двигательную реакцию нажатия на правый или левый рычаг. Таким образом, нейроны передних отделов коры мозга принимают непосредственное участие в построении сложного двигательного акта, отвечающего требованиям пространственно-временных характеристик среды. А.С. Батуев говорит о последовательном эстафетном вовлечении различных популяций клеток в процесс программирования нового двигательного акта [4].
Естественно, что, признав существование в мозге центральных моторных программ, исследователи заинтересовались нервными структурами, в которых они могли бы храниться.
Сейчас многие нейрофизиологи признают, что одним из таких хранилищ в мозге позвоночных является мозжечок. Мозжечок обучается различным программам движения, а затем и сохраняет их. В нем хранятся программы сложных и автоматически выполняемых двигательных актов, которые сформировались при жизни животного и человека. Высказано предположение, что хранение информации в мозжечке осуществляется на модифицированных синапсах клеток Пуркинье.
Однако следует иметь в виду, что функции мозжечка не сводятся только к созданию и хранению моторных программ. Они более обширны. Считают, что мозжечок в ответ на команду к движению осуществляет «перспективное планирование» движений за счет выбора типа моторной программы. Кроме того, мозжечок принимает участие в «ближайшем планировании» движений, непрерывно корректируя его за счет той обширной информации, которой он обладает относительно сенсорных характеристик положения всонечности и скорости, с которой намереваемое движение должно быть осуществлено. Показано, что частота разрядов нейронов промежуточного ядра мозжечка строго коррелирует со скоростью совершаемого движения. Кроме того, мозжечок считают центром координации различных двигательных актов, органом равновесия и регуляции мышечного тонуса.
В качестве другой центральной структуры, связанной с хранением центральных моторных программ, исследователи рассматривают базальные ганглии — структуры, расположенные в глубине белого вещества полушарий. Базальные ганглии представлены тремя парными образованиями. Это неостриатум, куда входят два ядра: хвостатое ядро и скорлупа, паллидум или бледный шар и ограда.
Полагают, что базальные ганглии имеют отношение как к хранению программ врожденных двигательных актов, так и двигательных автоматизмов.