СТРУКТУРНИЙ АНАЛІЗ МЕХАНІЗМУ
Схема механізму і вхідні дані для дослідження наведені в додатку 1. Механізм пресу (рис. 1) складається з електродвигуна, планетарного редуктора (електродвигун і планетарний на рис.1 не зображені), відкритої зубчатої передачі коліс 4 і 5 (з числами зубців Z4 і Z5). Механізм пресу складається з п’яти ланок, де ланка 1 – вихідна і ланка 5 вихідна (повзун). Визначимо основні типи ланок, характер руху, клас і назву кінематичних пар. Результати занесемо в таблицю 1.
Всі кінематичні пари механізму – плоскі і забезпечують відносний рух ланок тільки в одній або паралельних площинах, тому механізм також плоский.
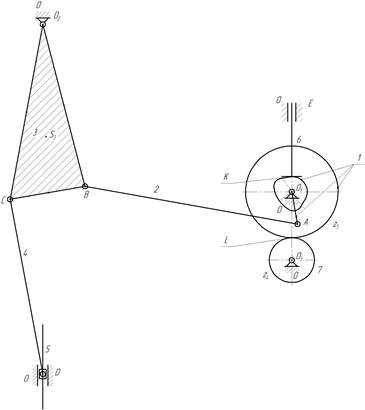
Рис. 1 – механізм преса.
Табл. 1 - характеристика ланок і кінематичних пар.
| Ланки механізму | |||||
| Позначення | Назва ланки | Характер руху | |||
| Стійка, корпус, станина, опора | Нерухомий | ||||
| Кривошип, кулачок і зубчате колесо 5. | Обертальний | ||||
| Шатун | Плоский | ||||
| Коромисло | Обертальний | ||||
| Шатун | Плоский | ||||
| Повзун | Поступальний | ||||
| Штовхач | Поступальний | ||||
| Зубчасте колесо 4 | Обертальний | ||||
Кількість рухомих ланок механізму  7 7
| |||||
| Кінематичні пари (КП) | |||||
| О1 | Обертальна | 0,1 | |||
| О2 | Обертальна | 0,3 | |||
| А | Обертальна | 1,2 | |||
| В | Обертальна | 2,3 | |||
| С | Обертальна | 3,4 | |||
| D | Обертальна | 4,5 | |||
| D1 | Поступальна | 5,0 | |||
| O3 | Обертальна | 0,7 | |||
| Е | Поступальна | 6,0 | |||
| K | Складний, вища КП | 1,6 | |||
| L | Складний, вища КП | 1,7 | |||
Кількість кінематичних пар 5-го класу  ; ;
| |||||
Кількість кінематичних пар 4-го класу 
| |||||
Ступінь волі визначимо за формулою Чебишева:

Для визначення класу механізму треба замінити всі кінематичні пари 4-го класу на кінематичні ланцюги, в котрих є тільки кінематичні пари 5-го класу
(рис. 2).
Групи Ассура (нульові групи) зображені на рис. 3 в порядку їх відокремлення, а начальний механізм, тобто ведуча ланка, на малюнку 4.

Рис. 2 - Механізм преса після заміни кінематичних пар 4-го класу

Рис. 3 - Групи Асура 2-го класу і другого порядку
Найвищий клас груп Аcсура – другий, тож і увесь механізм другого класу.


Рис. 4 – Механізм 1-го класу Структурна формула побудови механізму.
СИНТЕЗ МЕХАНІЗМУ ПРЕСУ
Для синтезу механізму задані такі дані:
О1А = 51 мм; АВ = 307 мм; О2В= 210 мм; О2C= 205 мм; СD = 205 мм
L1/= О1А+ АВ=51+307=358 мм; L2/= О2В= 210 мм
та кут 25° який визначає положення ланок механізму.
Аналізуючи схему механізму та заданні данні визначаємо, що довжина всіх ланок механізму задана. Довжину ходу Н та відстань О1О2 потрібно визначити з креслення.
ПЛАНИ МЕХАНІЗМУ
Довжину відрізка О1А на кресленні приймаємо рівним 25 мм. Масштабний коефіцієнт побудови планів механізму:
μ1 = lO1A/O1A = 0,051/25 = 0,00204 м/мм
Довжини відрізків, які зображують ланки на планах:
О1А = 25 мм;
AB = 0,307/0,00204 = 150,49 мм;
О2B= 0,21/0,00204 = 102,94 мм;
О2C= 0,205/0,00204 = 100,49 мм;
СD = 0,205/0,00204 = 100,49 мм;
L1/=0,358/0,00204 =175,49 мм;
L2/= О2В= 102,94 мм.
З креслення визначаємо:
CB = 44,095·0,00204 = 0,08995 м
Кут перекриття θ = 6,11°
H = 18,21 мм, H1 = 14,08 мм
l0 =203,45·0,00204 = 0,415 м
Креслимо механізм в двох крайніх положеннях і в положенні ·заданим (керівником проекту) кутом α1 = 310,39° до осі Х, яка проходить через центр обертання кривошипа О1 і ланки 3 - О2
Робимо вимірювання на планах механізму переміщення повзуна 5 і, з урахуванням масштабного коефіцієнту, записуємо в таблицю 2.

Рис. 5 – Механізм пресу
Таблиця 2 – переміщення повзуна в залежності від кута.
| положення кривошипа | |||
| Кут повороту кривошипа від осі Х в градусах | 30,4° | 310,39° | 204,28° |
| Переміщення повзуна в мм креслення | 14,08 | 18,21 | |
| Дійсне переміщення повзуна в м | 0,0287 | 0,0371 |
Визначимо кут перекриття за формулою: θ = 180 – (α1k -α10 )
θ = 180° – (204,28° – 30,4°) = 6,12°
Коефіцієнт зміни середньої швидкості вихідної ланки дорівнює:
k = (180° + θ)/(180° – θ) = (180° + 6,12°)/(180° – 6,12°) = 1,07