Способы задания движения материальной точки
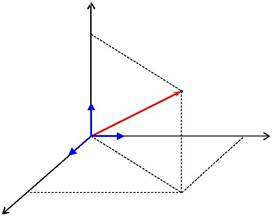
При векторном способе задания движения положение материаль-
нойr точки в данный момент времени характеризуется радиус-вектором r ,проведенным из начала координат в данную точку(рис. 1.2.1).
При движении материальной точки конец радиус-вектора опи-сывает в пространстве кривую, которая называется траекторией движущейся точки. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. Длина и направле-ние радиус- вектора изменяется со временем согласно некоторому за-
кону rr = rr( t ), который называется уравнением движения материаль-ной точки.
При координатном спо-собе задания движения ис-пользуется декартова система координат. Положение мате-риальной точки в данный мо-мент времени характеризуется тремя координатами X, Y и Z, а перемещение может быть представлено как результат трех независимых перемеще-ний вдоль координатных осей: x = x(t), y = y(t), z = z(t).
rr= x (t )i
Y
| j | r | A | |
| k | i | ||
| Z | |||
| Рис. 1.2.1 |
+ y (t ) rj + z (t )k .
Х
(1.2.1)
Средние, мгновенные скорости и ускорения
Для характеристики движения вводится понятие вектора скоро-сти,который определяет как быстроту движения,так и направление вданный момент времени.
Средней скоростью на некотором участке MN называется вели-чина равная отношению перемещения r к промежутку времени t, за который это перемещение произошло
| υср = r t . | (1.3.1) | ||
| Вектор мгновенной скорости есть предел, к которому стремится | |||
| r | t →0,т.е. | ||
| вектор υср при стремлении |

| r | r | = lim | r | ||
| υ= lim | υ | ср | t | ||
| t →0 | t →0 | ||||
| При t → 0 направление вектора | r |
траектории в точке 1. Кроме того, что при модуль скорости υr равен


| = drr | . | (1.3.2) |
| dt |
стремится к касательной к t →0 rr→ s ,поэтому


| υ= lim | rr | = lim | s | = ds . | (1.3.3) | |||
| t | t | |||||||
| t →0 | t →0 | dt | ||||||
| В декартовых координатах | r | |||||||
| r | (1.3.4) | |||||||
| υ= υ x i | + υ y j + υz k , |
где
| υ x = dx | , | υ y = dy | , | υz = dz | ||||||||
| dt | dt | dt | ||||||||||
| r | ||||||||||||
| есть проекции скорости υ на оси х, у, z. Модуль скорости | ||||||||||||
| = | dx 2 | dy 2 | dz 2 | |||||||||
| υ= υ x | + υ y + υ z | + | + . | |||||||||
| dt | dt | dt | ||||||||||

(1.3.5)
(1.3.6)
Быстрота изменения скорости со временем характеризуется ус-корением. Ускорение равно первой производной от вектора скорости υr или второй производной от радиус-вектора r (t ) по времени. Уско-
рение − это векторная величина
| r | r | r | |||
| d υ | d 2r | ||||
| a | = | dt | = dt2 . | (1.3.7) |
Ускорение можно найти по его проекциям на оси координат
| a x = | d υ | x = | d 2 x | , a y = | d υy | = | d 2 y | , az = | d υ | z | = | d 2 z | , | |
| dt | dt2 | dt | dt | dt | dt2 | |||||||||
ar= a x i + a y rj + a z k .
Модуль
(1.3.8)
(1.3.9)
| a = a x2+ a y2+ az2. | (1.3.10) |

ЭЛЕМЕНТЫ КИНЕМАТИКИ Лекция № 2
1.4. Нормальное и тангенциальное ускорения при криволинейном движении.
1.5. Классификация движений материальной точки.
1.6. Кинематика абсолютно твердого тела.
1.7. Связь между линейными и угловыми характеристиками те-ла при его вращении.